一类面对称飞行器横侧向通道LCDP控制方法*
2022-01-05张记华赵文龙徐胜利
张记华,王 磊,赵文龙,徐胜利
(上海机电工程研究所·上海·201109)
0 引 言
某飞行器采用乘波体面对称气动外形。其操纵面配置极其简单,仅配置了一对水平操纵舵面,需实现纵向和横侧向通道的稳定控制。气动布局的简洁化对控制系统提出了更高的技术要求。纵观欧美等军事强国,在某类飞行器研制计划方面,均将气动外形设计与控制作为关键技术进行了研究。因此,开展气动与控制的一体化设计研究对于提高飞行器总体设计水平而言具有重要意义。
某类乘波体面对称飞行器具有高升阻比的特点。相较于轴对称外形的纵向、横向和侧向的三通道独立性,面对称飞行器横侧向通道具有强耦合的特性,这种强耦合特性增加了稳定控制的难度。
Johnston等[10]提出了关联型和严格化的飞行器失控敏感性判据,即偏航动态稳定—横侧向控制偏离联合判据。在此基础上,Weissman[11-12]发展了飞行器失控敏感性判据—Weissman图,可有效预测失速情况下的分离特性和转动特性。文献[13]针对类HTV-2外形飞行器,研究了横侧向控制偏离判据大于0时的气动特性与控制策略。考虑类HTV-2外形飞行器横向静稳定性易于获得的特点,提出了一种利用横侧向通道耦合进行气动特性及控制策略设计的方法。分析结果表明,基于该方法设计的气动特性和控制策略可实现横侧向控制偏离参数(Lateral Control Deviation Parameter,LCDP)大于0状态下的系统稳定。文献[14]针对某类飞行器大攻角下副翼操纵反效的问题,提出了“改善LCDP的副翼控制滚转”与“方向舵控制滚转”两种控制策略,并利用结构奇异值快速分析了两种滚转控制策略的鲁棒性,最后通过仿真分析对比了两种滚转控制策略的控制品质与鲁棒性。仿真结果表明,在标称状态下,两种滚转控制策略均可完成滚转控制,但在考虑气动参数摄动的情况下,方向舵控制滚转的鲁棒性明显优于改善LCDP的副翼控制滚转的鲁棒性。文献[15]重点研究了可重复使用运载器(Reusable Launch Vehicle,RLV)制导与控制的关键问题,针对大攻角横侧向控制特性,研究了非常规的“副翼增稳荷兰滚、方向舵增稳滚转模态和控制滚转角 ”策略。仿真结果表明,该策略符合RLV大攻角高马赫数下的气动特性。
本文重点针对一类面对称飞行器横侧向通道的稳定控制技术进行了研究,分析了横侧向通道间的耦合控制机理,构建了控制系统模型,开展了具体实例计算和仿真分析,证明了横侧向通道LCDP控制技术的有效性。
1 机理分析
该面对称飞行器采用简洁气动布局,取消了垂直尾翼,使得偏航通道压心和俯仰通道压心存在较大差异。由于减少了一对控制舵面,偏航阻尼力矩小,再加上滚动通道转动惯量小,非常容易出现横侧向通道失稳的情况。
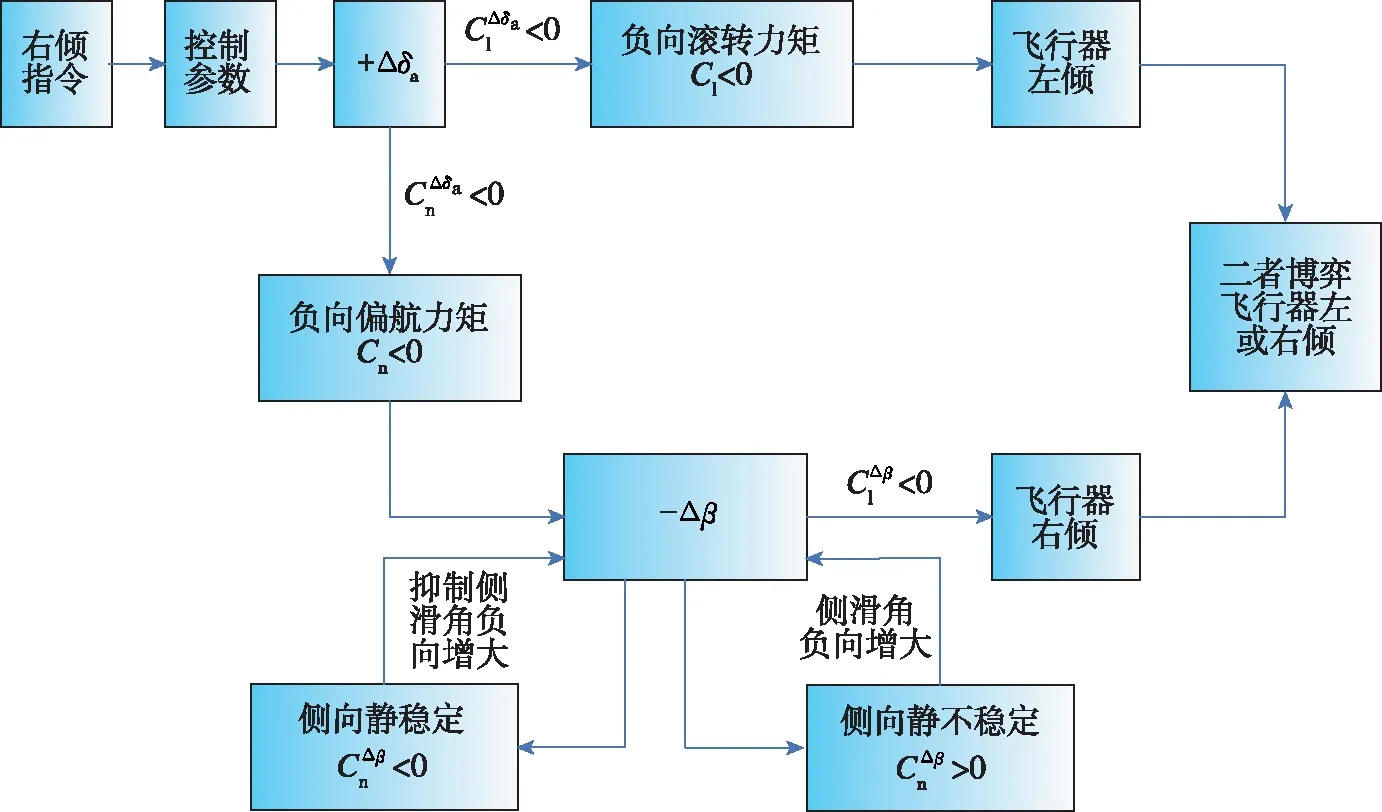
在类似气动布局的航天飞机上,可使用偏航姿控喷管直接力装置完成对横侧向通道的控制,其具体物理过程为:当滚动通道出现偏差时,开启偏航通道直接力装置,使飞行器产生侧滑角。由于飞行器中存在滚动通道和偏航通道的耦合,可由侧滑角诱发滚动力矩,从而实现对滚动通道的控制。使用方向舵控制滚转的本质是通过偏航产生侧滑角,充分利用由飞行器侧滑角诱发的滚动力矩的负值较大的特性,达到利用侧滑角产生滚动控制力矩的目的,进而实现横侧向通道的稳定和控制。
与上述航天飞机横侧向通道控制类似,在仅有一对水平操纵面的情况下,可以进行俯仰通道控制,也可以进行滚动副翼操纵。在滚动副翼的控制输入中,引入横向和侧向运动状态反馈(如侧滑角、滚动角速度、偏航角速度以及倾侧角等),通过横侧向通道的气动耦合特性与控制策略一体化设计,实现了横侧向通道的稳定和控制。
当在滚动副翼控制输入中仅引入侧滑角反馈时,只需要控制侧滑角反馈参数Kβ满足一定的气动约束条件,则无论CLCDP>0或CLCDP<0,均可实现系统状态的稳定[13]。
当在滚动副翼控制输入中仅引入滚动角速度反馈时,只需要滚动角速度反馈控制参数Kωx满足一定的气动约束条件,就能实现CLCDP<0时的横侧向通道稳定;当在滚动副翼中引入偏航角速度反馈时,只要偏航角速度反馈控制参数Kωy满足一定的气动约束条件,就能实现CLCDP>0时的横侧向通道稳定[13]。
当在滚动副翼控制输入中仅引入倾侧角反馈时,若CLCDP<0,且倾侧角反馈控制参数Kγ>0并满足一定的气动约束条件,就能实现横侧向通道的稳定;若CLCDP>0,且倾侧角反馈控制参数Kγ<0并满足一定的气动约束条件,就能实现横侧向通道的稳定[13]。
上述横侧向通道状态反馈在形成滚动副翼控制输入时,能够实现不同的气动约束条件,如:通过弹翼适度上反即可实现横向静稳定性的要求。此外,针对横侧向通道CLCDP极性变号的问题,则可采用气动特性离线设计,在线通过飞行状态自适应切换的方式实现。为避免切换过程中的振荡,在切换中需对副翼的转动速率进行线性渐变限幅的软化处理。
2 基于LCDP特性的气动与控制一体化设计及稳定性分析
2.1 系统建模
横侧向通道的控制结构如图1所示。配置速率陀螺传感器可实现对飞行器运动信息的测量。通过滚动角速率和偏航角速率反馈形成阻尼回路,可改善横侧向运动阻尼的特性。同时,将惯性测量信息输入导航解算模块,经解算可输出侧滑角和倾侧角的信息。其中,侧滑角信息在经过限幅处理后,可形成侧滑角反馈回路,以改善侧向姿态的稳定性。将倾侧角控制指令限幅输出值和倾侧角反馈限幅输出值进行比较,通过产生的误差信号对倾侧角进行校正与控制,可实现良好的精度闭环和动态特性控制。
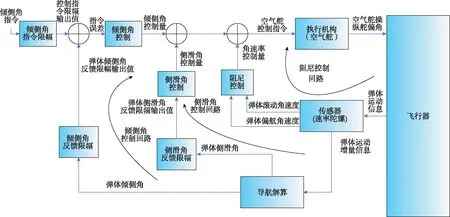
图1 横侧向通道控制结构框图
以Δωx1、Δωy1、Δβ、Δγv为状态量。其中,Δωx1为滚动角速度,Δωy1为偏航角速度,Δβ为侧滑角,Δγv为倾侧角。以滚动副翼Δδa为输入量,可得到横侧向状态空间方程[9],如式(1)所示。
(1)
2.2 气动与控制体一体化设计
下面分析横侧向通道静稳定(或静不稳定)特性下的耦合控制机理,通过飞行器气动和控制的一体化设计,可以实现一对水平舵面对横侧向通道的稳定控制,为飞行器的简洁气动布局(仅配置一对水平操纵舵面)提供理论依据。

2.3 稳定性指标约束

下面分别针对CLCDP<0或CLCDP>0的条件,分析了部分状态( Δωx1、Δγv、Δβ)反馈下的闭环稳定性充要条件,给出了控制参数的指标约束。
条件(1):CLCDP<0
定义滚动副翼反馈控制律为Δδa=KωxΔωx1+KγΔγv+KβΔβ。其中,Kωx>0、Kγ>0、Kβ>0分别为滚动角速度反馈控制增益、倾斜角反馈控制增益、侧滑角反馈控制增益。将其代入状态方程(1),可求取闭环系统状态方程为
(2)
根据式(2),闭环系统的状态特征方程为
s4-b8gKωxs3-[(b6p+b8pKβ+b8gKγ)cosΔα+
(b6g+b8gKβ-b8pKγ)sinΔα]s2+[(b8gb6p-
b6gb8p)KωxcosΔα]s+(b6pb8g-b6gb8p)Kγ=0
(3)
根据劳斯稳定性判据,可得稳定性的充分必要条件为
(4)
条件(2):CLCDP>0
定义滚动副翼反馈控制律为Δδa=KωyΔωy+KγΔγv+KβΔβ。其中,Kωy>0、Kγ<0、Kβ>0分别为偏航角速度反馈控制增益、倾斜角反馈控制增益、侧滑角反馈控制增益。将其代入状态方程(1),可求取闭环系统的状态方程为
(5)
根据式(5),闭环系统状态特征方程为
s4-b8pKωys3-[(b6p+b8pKβ+b8gKγ)cosΔα+
(b6g+b8gKβ-b8pKγ)sinΔα]s2+[(b6gb8p-
b8gb6p)KωysinΔα]s+(b6pb8g-b6gb8p)Kγ=0
(6)
根据劳斯稳定性判据,可得稳定性的充要条件为
(7)
3 仿真分析
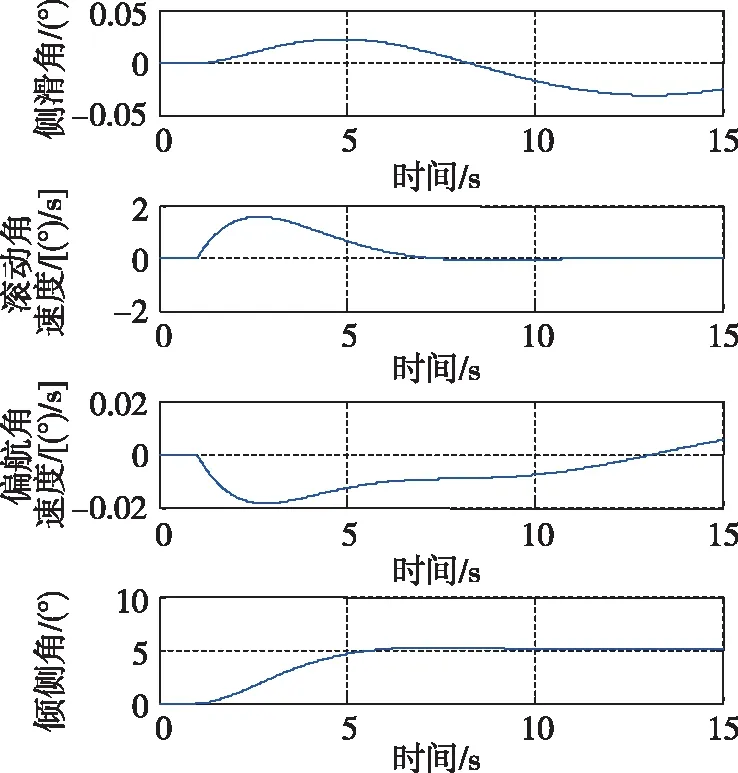
3.1 侧向强静稳定性分析
某型飞行器的典型飞行状态气动参数如表1所示,表中符号的定义同2.1节。

表1 典型飞行状态气动参数

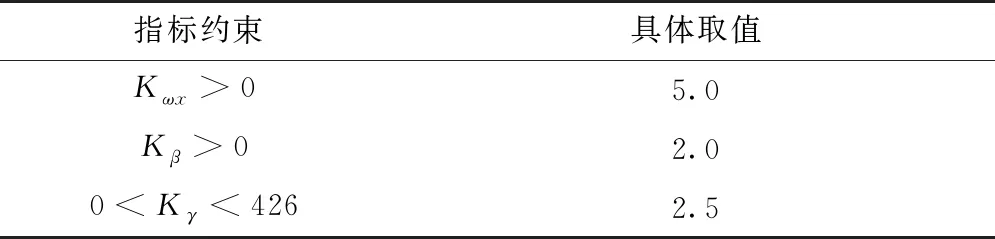
表2 控制参数
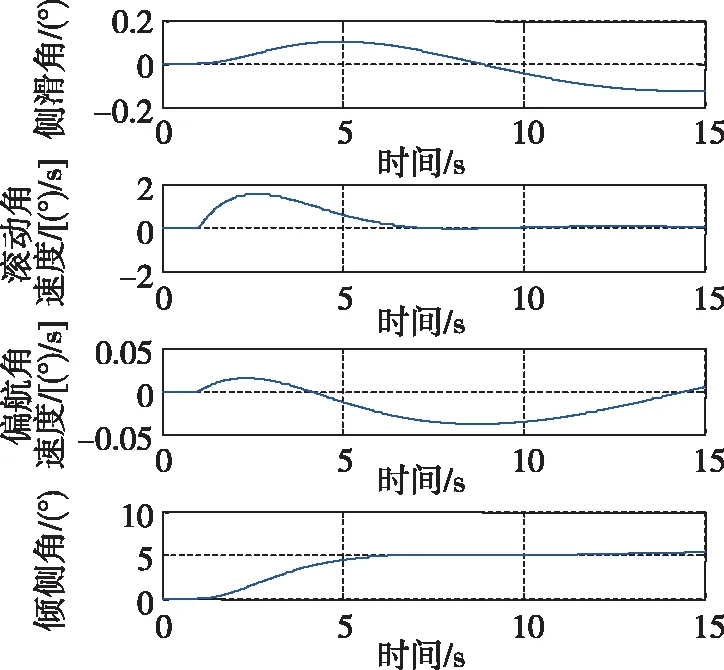
(a)横侧向运动状态曲线

(a)横侧向运动状态曲线
(a)横侧向运动状态曲线
(a)横侧向运动状态曲线
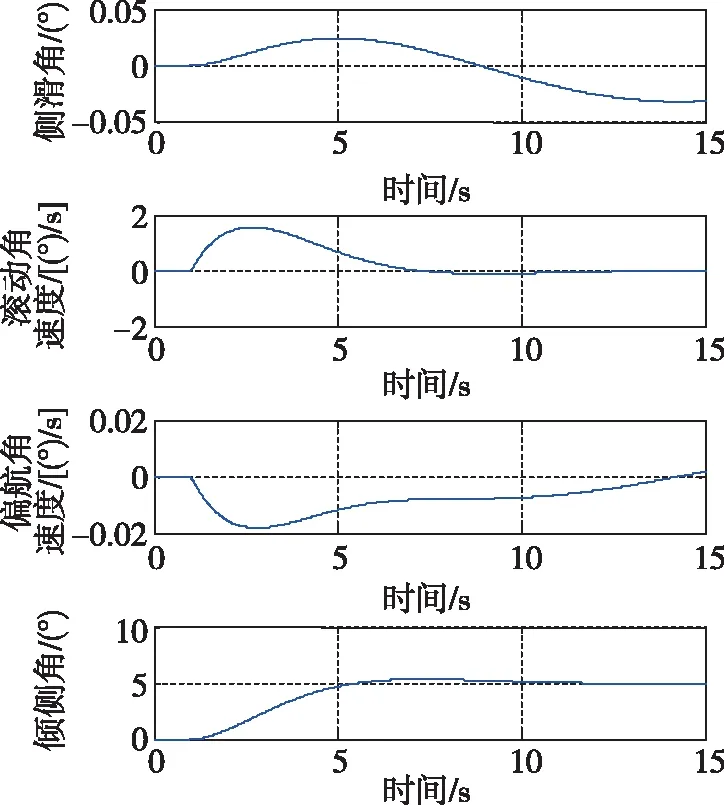
3.2 横向强静稳定性分析
某型飞行器典型的飞行状态气动参数,如表3所示。
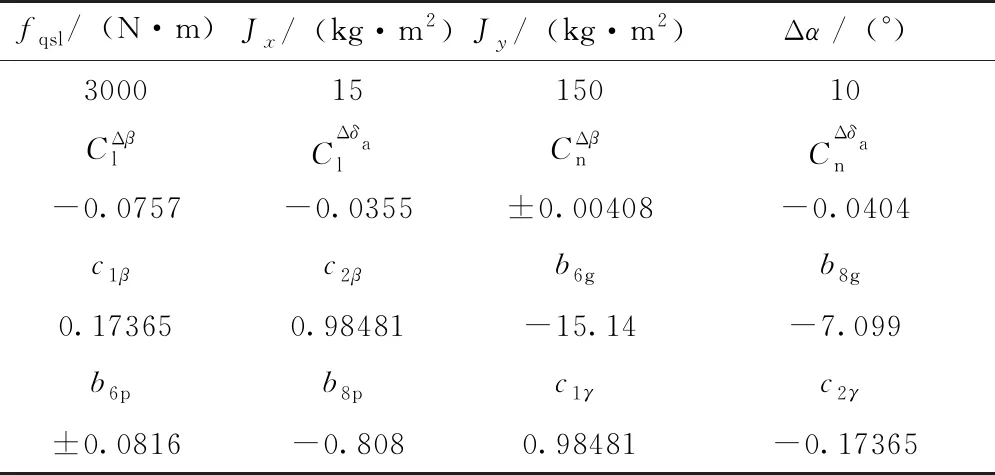
表3 某飞行器典型的状态气动参数

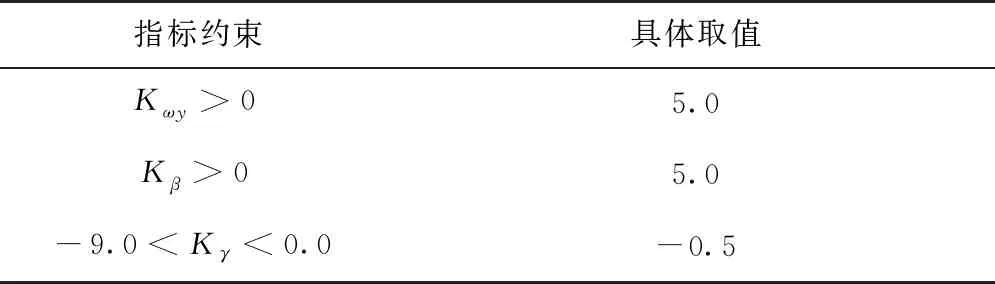
表4 控制参数设计结果

(a)横侧向运动状态曲线
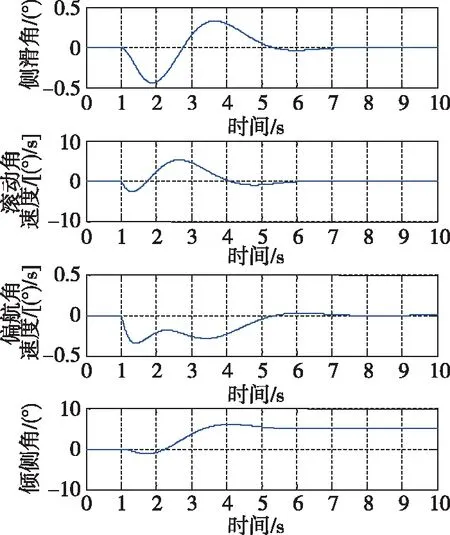
(a)横侧向运动状态曲线
4 结 论
基于一对水平操纵舵面的面对称飞行器具有大升阻比、横侧向通道强耦合的特性,本文分析了该飞行器横侧向通道耦合控制的机理,推导了在LCDP稳定性判据条件下控制参数和气动特性参数的约束条件,并结合典型飞行状态气动参数具体实例,进行了仿真分析。结果表明,通过LCDP控制技术,可以实现基于一对水平操纵舵面的面对称飞行器横侧向通道的稳定控制。
