智能留样机器人机械与控制系统设计的研究
2022-01-04杨帆
杨 帆
(杭州康奋威科技股份有限公司,杭州 310052)
食品留样是指加工性食品在供餐前取一定质量的样品按照规定时间保存和备查,以此作为餐厅食堂出现食源性安全事故时快速追溯事故起因的依据[1-2]。现在国外食品安全监管最为严格的德国不仅有完善的相关法律法规,同时还具备健全的监管管理机制,并由政府相关部门管理分级负责,政府监管和企业自律相结合,而且消费者也能积极参与监管。他们在食品安全追溯制度上建立了严格的市场准入制度,同时建立了完善的标准,从食品采购到生产、加工、仓储、运输和销售的各个环节都处于监控之下,各种信息都公开透明且记录在案,一旦出现问题可及时追溯根源所在。为了保证整个体系能够有效实施,德国政府在每个邦设有2~3个化验室,各邦平均每年抽验的食品项目大约有40万项。
在国内,很多中小学以及企事业单位都已经按照食品留样规程进行食品留样,但目前的食品留样设备还非常简单,比较规范的做法一般把留样食品锁在冰柜里,并有专人管理,同时安装视频监控装置。但是,食品的留样信息,如食品留样名称、食品留样时间、食品留样保存温度等信息都无法实时上传至互联网,导致无法进行有效的监管和数据存储。另外,也存在留样保存期内易受人为破坏和替换的可能性。因此,为了对食品留样过程进行有效的监管,加强食品安全与可追溯性,需要一款严格按照食品留样规程进行设计的食品留样设备,并通过现代技术手段采集留样过程的各项信息,再通过互联网进行有效的智慧监管。
1 总体规划设计
通过对国内食品留样规程和食品留样过程进行调研,根据食品留样容器和食品留样冷藏环境要求,以及食品留样存取过程、操作方法、人员操作习惯等,对食品留样存储的安全问题、食品留样取样与取证数据提取需求、留样数据内容与采集信息、人机交互功能以及未来留样数据互联网监管需求等进行整理;并基于人因论设计思维、过程设计思维、环境生态论设计思维等[3],运用人机交互与人机工程学对留样操作流程进行规划设计和功能求解设计。为了满足食品留样的各项功能,按需要设计了自动控温的冷藏系统、食品留样仓储系统、食品留样智能搬运机器人、感知和控制系统以及人机交互等几个功能模块,其工作过程见图1。

图1 智能留样机器人工作过程
2 机电系统设计
2.1 冷藏系统与食品留样细菌隔离设计
根据0~10 ℃留样冷藏温度要求以及内部体积要求,采用工业冰箱为冷藏系统主体,该系统具备自动控温功能和自动除霜功能,温度控制范围在±2 ℃,并能长期保持在0~4 ℃的工作环境[4]。食品留样时,要使食品留样冷藏48 h以上,以抑制细菌大量繁殖。为避免食品留样不与留样机器人结构和空气发生直接接触,采用密闭的食品级材质留样盒作为食品留样存储载体,见图2。

图2 留样盒和留样盒托盘
2.2 存储立体库设计
为保证餐饮单位正常食品留样作业,根据冷藏系统内部空间,采用整体框架叠层托盘式库体结构,以增加食品留样容量。库体结构为适应冷藏系统内部低温高湿的环境,采用不锈钢与铝合金为主体结构材料。
库体结构以轻量化的C形梁为主体结构件,组成桁架形式仓位结构和机械手支撑结构。因为C形梁四边的折边为结构受力处,且折边与折边没有连接,其受力形式相当于悬臂梁受力,容易产生晃动和水平位移,所以严重影响了整个桁架的形式仓位结构、机械手的支撑结构强度和运行稳定性。为此采用了焊接补强措施,以增加C形梁四边折边处的连接强度、钣金结构支撑强度和承受机械手运行惯性冲击力的能力。同时,采用力学叠加原理,充分利用工业冰箱整体强度,使机械手支架和立体存储架结构得到很好的支撑,以增加设备运输过程中的可靠性。
为确保食品留样安全,避免人为因素的影响,库体结构采用机械隔离结构,以隔离库存食品留样区域与操作人员操作区域。但考虑到设备维护的需要,设置了传感器可检测与识别的维护通道与空间,以方便人员对设备进行维护。食品留样在库存食品留样区与操作人员操作区域的输送过程需要以托盘为载体装载留样食品,并由人工放入留样区,通过传感器自动识别托盘位置,控制系统调动机械手插取和存放托盘,完成两个区域间的输送。由于人工放入托盘会存在位置不准确以及超出机械手安全承载区域的问题,在机械手运行时会出现机械干涉与撞击现象,从而损坏机械结构和智能留样机器人,影响正常食品留样作业。为此采用机械导向定位,同时采用多传感器识别托盘空间位置信息,以保证托盘位置准确,避免机械手工作过程中出现机械干涉和撞击现象。但在实际使用中,可能还会出现因外部撞击而造成的托盘位移或人工手动操作时误操作而产生的撞击,为此在机械结构上设计了托盘插取模组过载脱落结构,避免撞击时产生机械结构塑性变形和结构断裂现象。在出现撞击故障后,只需维修人员确认结构没有损坏和结构位移,重新安装并重启智能留样机器人,简单测试后便可投入使用。
由于工业冰箱内部空间有限,但却需要装载整个桁架形式仓储结构和机械手支撑结构,设计过程采用紧凑性设计。为了保证机械手在工业冰箱中3个轴向自由度的运动,并尽量增加运动行程,以便增加存储空间,同时为增加人工观测留样状况,需要使桁架形式仓储结构位于工业冰箱外侧,而工业冰箱内侧则作为机械手的运动空间。另外,为保证机械手运动过程不与桁架形式仓储结构产生撞击现象,在两个区域间设置了隔离空间,从而在考虑桁架形式仓储结构误差和机械手运动区域误差的前提下尽量缩小隔离空间尺寸,以节约工业冰箱内部空间。
采用合理的食品留样出入口结构设计,并通过一系列操作流程、操作动作以及人机界面优化设计,使日常留样操作变得非常简单,无需开锁、输入密码、操作触摸屏、寻找存储位置和食品留样等烦琐过程,只需开门放入食品留样托盘即可。
2.3 存储机械手设计
根据内部空间约束和存取方式,智能留样机器人运动轨迹设计可以分为路径规划(空间)设计和轨迹规划(时间)设计。轨迹规划是对路径赋予时间信息,从而使机械手能够沿给定路径运动,并选择适合的控制算法和参数,形成实时的位移、速度和加速度等确定路径,从而实现平稳准确的运动[5-6]。依据规划运动路径和轨迹设计、空间大小、成本约束等条件[2],本结构采用三轴直线坐标机械手结构,见图3。

图3 存储机械手
为驱动3轴机械手运动,根据内部结构紧凑、驱动特性以及成本等约束条件,本设计采用闭环步进电机驱动和结构紧凑的齿轮齿条传动设计。为提高电机动态性能,减小结构体积和质量,并尽量提高库容量,机械手结构采用轻量化的箱形梁或C形梁形式的不锈钢钣金和铝合金结构,并运用优化强度结构设计和冷作硬化、受力点补强焊接等处理方法提升各零部件的结构强度。
为了保证机械手各轴可靠运行,在动力电缆和信号电缆布线设计时,考虑到维修方便性,采用了对接接头和端子连接电缆,并将接线点尽量布置在维修面易于操作的位置,同时采用防水、防湿和防结冰处理,提高运行可靠性。
3 控制系统软硬件设计
3.1 控制系统各层级设计
智能食品留样机器人的控制系统是基于分级智能控制原理,由3个控制级组成的系统。第一级是决策级(上位机),是本系统中优先级别最高的控制级,负责最优决策的功能。操作员通过人机界面上的参数和输入指令完成控制功能,并以此监视和引导实时控制级和执行驱动级的所有行为,显示反馈系统的各项故障报警信息和操作信息,然后通过故障诊断程序判断故障信息和操作的正确性,以给出操作指导信息。该控制级的控制功能由基于ARM控制芯片[7]和其他电子元件及通信接口所组成的印制电路板(Printed Circuit Board,PCB)控制板承担,其控制程序需要在基于Linux系统的程序控制软件中完成各项设定功能。第二级为实时控制级(下位机),主要功能为接收通信接口中由决策级下达的指令,通过脉冲信号和动力通断协调指挥执行元件及各子系统工作,同时采集各个传感器传回的设备状态信息,并经过通信接口上传至决策级。该系统的控制功能由基于ARM控制芯片和其他电子元件及通信接口所组成的PCB控制板承担,其控制程序需要在基于Linux系统的程序控制软件中完成各项设定功能,以确保智能留样机器人的各项工艺动作可靠实施。第三级为执行驱动级,能够按上位机给定的任务通过下位机的脉冲信号和动力通断信号将各个指令位置、加速度、速度以及打开闭合信号等形式转变成相应的动作,从而直接对执行机构(如闭环式步进电机等)进行控制,并通过电机自带编码器检测电机轴的角度信息来不断修正位置、速度和加速度等参数,从而按照留样机械手路径规划完成各项程序动作[8]。
3.2 基于Linux系统的人机交互界面设计
研究食品留样的实际过程、人因论设计思维和交互设计原理来设计人机交互内容和操作过程,需要同时确定各个功能模块的显示界面和相关内容,根据不同层次操作人员的使用权限,确定操作界面功能和显示内容,以减少客户操作时间和操作难度,为客户使用提供良好的体验感。
3.3 基于Andriod系统的移动终端设备App设计
基于ARM嵌入式Linux系统的上位机控制板,通过WIFI与以太网采用Get/Post的方式向服务器发送HTTP请求,实现移动终端与服务器的数据传输[9],并在基于移动客户端的Andriod系统App程序上显示相关数据,然后由App程序通过用户权限提供所需数据。App程序采用Andriod studio开发,能够使用Andriod控件设计App UI界面,并采用Andriod布局策略构建用户界面[10],以适应不同移动终端屏幕尺寸显示界面。
3.4 人工智能与故障专家诊断系统
为了降低设备售后与维护成本,提高故障的处理速度和操作人员良好的体验感,在积累大量用户现场使用数据和售后故障处理方法的基础上,对故障原因、故障状态以及故障分析处理过程进行研究和梳理,建立了故障处理树状知识库结构,由其组成的专家系统基本结构如图4所示。该结构能够根据设备状态数据、报警信息和人员操作信息等,运用故障判断推理机制软件算法进行故障判断和自动处理,对于需要人工干预和确认的故障系统会自动形成和显示人员操作提示,使现场人员能够通过远程人工判断分析的方式控制设备运行相关处理程序,从而快速处理故障问题[6]。
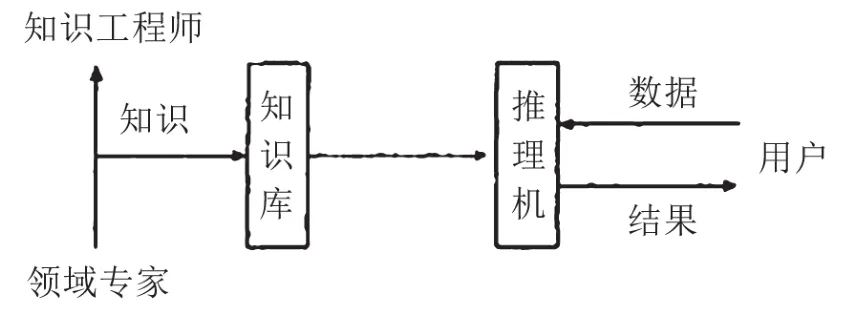
图4 专家系统的基本结构
3.5 智能食品留样调度系统
为了保证食品留样严格按照规定的存储规范保存48 h或更长的保存时间,同时能够采集存储留样数据和操作人员信息,本智能留样机器人具备智能食品留样调度系统,以确保食品留样能够自动通过3轴食品留样存取机械手进入相应的立体库仓位,并在保存48 h后才能够被3轴食品留样存取机械手自动提取出来。同时,智能食品留样调度系统将自动记录食品留样的入仓时间和仓位,从而自动计算剩余留样时间,并将其上传至显示屏和互联网,以便主管部门随时监管使用单位的食品留样情况。智能食品留样调度系统还能通过密码或识别事先设置的食品安全管理人员的指纹,提取留样人员的身份、留样信息以及时间等并记录,从而方便上级主管部门获知和监督食品留样提取信息。
4 结语
智能留样机器人是针对食品留样智能网络化管理而设计的,可以应用在企业、政府机关、学校等人员聚集地区的餐饮食品留样规范性管理,其留样时间记录、存储温度、取样记录、食品安全性以及可追溯性明显优于老式留样柜,且具备互联网数据传输功能,能够实现智能网络化管理,具有非常广泛的应用价值。
