智能型全站仪不整平测量技术应用研究
2022-01-04陈浩
陈浩
(吉利百矿集团有限公司六龙煤矿,广西 百色 553400)
对全站一步整平工作的来讲,三维观测参数数值的精确度进行实验和分析,并且有效验证智能型全站仪设备,在不整平工作状态下测量工作过程中,获取的斜距观测参数数值精确度会有明显的提升,全站仪设备在整平和不整平控制状态下进行观测工作,对斜向距离的观测参数数值的精确度影响相对较小。与此同时,通过对全站仪不整平测量工作过程中,对三维坐标计算工作模型进行实验和验证,建立全站仪在不整平工作状态下三维坐标计算模型。
1 全站仪不整平自由测站测量工作优势分析
全站仪自由测站测量工作,现阶段已经广泛应用到各个矿山和建筑工程项目施工领域当中,并且发挥的作用和优势非常明显。全站以自由测站测量工作技术,自从国外引进之后有效打破了传统的测量工作模式,在很大程度上提高了测量工作效率。全站仪自由测站测量工作过程中,主要指的是全站仪设备可以随意地设置在某个特定的区域,不需要对全站仪设备进行对中,只需要对全站仪设备进行整平处理之后,即可进行后续的测量工作,这种测量工作方法,主要是以每一个测站建立起一个相对应的全站仪独立坐标系,不同的观测站在测量工作过程中,具有不同的测站坐标系,因此以全站仪在自由测站工作过程中,可以通过自由架设仪器设备保证任意方向上作为坐标北方向。通过全站仪自由测站测量工作原理分析可以看出,全站仪设备在测量工作之前,需要对其进行必要的整平处理工作,而现阶段随着我国科技技术的不断向前发展,对于测量工作人员的工作效率要求正在不断提升,尤其在一些矿山或者建筑工程项目测量工作过程中,要求工作人员的测量效率需要得到全面提高,保证测量工作在规定的时间范围内完成,通过采取全站仪不整平自由测站测量工作方法,可以明显的提高测量工作人员的工作效率,进而可以降低测量工作的成本[1]。
2 全站仪不整平自由测站测量以及数据处理工作方法
全站一步整平工作状态下,坐标系和大地空间坐标系之间存在旋转平行转化工的关系,而全站仪不整平自由测站测量工作,主要是在全站仪在不整平状态下,对特定数量的已知点与未知点为展开三维坐标测量工作得到各个已知点位和未知点位。在不整平站星座标系条件下的三维坐标信息,同时对各个已知点位也需要建立起一套三维坐标系。比如,在矿山空间坐标系和大地坐标系建立工作过程中,要求准确求出已知点位坐标系和三维坐标系之间的转换参数,以此为基础可以使用三维坐标转化工作模型,将其中设定的位置点,在工程设计坐标系当中来进行转化和分析,从而可以有效实现在测量工作当中,无须对全站仪设备进行整平,可以解决各个未知点在指定坐标系当中的三维坐标。在该项工作的实施工作当中,其中最重要的是三维坐标转化模型的选择,直接影响到三维坐标系的转化工作精度[2]。
3 全站仪不整平自由测量仪器三维坐标计算工作方法
全站一步整平自由测站,在测量数据处理工作过程中,主要是使用已知若干个点的三维坐标体系设立其对应的参数坐标,有效计算出三维坐标当中转换模型内部各个未知参数的转化,然后再通过三维坐标转化互动模型进行后续的坐标处理和转换工作。通过上述计算的方法,不但可以有效测算出各个位置点位,在指定坐标系当中的三维坐标体系,同时还可以用于测算各个全站仪中心点位置对应的三维坐标系参数。在具体实现工作当中,需要保证在全站一步整平自由测站测量工作过程中,将整平仪器中心点位置设定为三角坐标系,事先设定的原点位置并且将原点的坐标设定为(0,0,0)或者是可以设置成其他任意的三维坐标参数,以此为基础有效获取全站仪不整平测量坐标转换模型,测算出全站仪器设备中心位置的指定坐标系所对应的三维坐标体系。在全站仪设备整平工作状态下,三维坐标系和全站仪,在不整平状态下的三维坐标分别实施三维坐标的转化工作,并且有效解算出两个坐标系中间位置的三维坐标转换工作参数,然后可以有效获取对应的转化参数以及对应的转化工作模型,将原本设置的仪器中心点位置,通过三维坐标转化处理工作之后转移到整平状态坐标系当中来进行进一步处理,通过这一方式可以有效获取不整平状态下全站仪器设备的三维坐标系,同时实现三维坐标的有效转化,有效计算的三维坐标转换参数[3]。
通过参数数据分析可以看出,在小倾斜角度状态下,通过使用上述两种计算工作方法,有效计算出仪器设备中心点位的三维坐标和三维坐标的转化工作方式,在仪器设备中心点的三维坐标设定过程中表现出的效果相对较差,同时最大差值为-2.3mm,在大倾斜角度的工作状态下,通过使用上述两种消元解散工作方法,在仪器设备当中所获取的坐标分别和三维坐标相差相对较小,其中在x、y 坐标点上差值也相对较小,但是在这坐标上相差相对较大,最大可以达到7.5mm。通过使用解析消元计算工作方法,相对于三维坐标转换工作方法而言,在z 坐标上差值只有5.72mm,而几何消元法相对三维坐标转化在z 坐标上的差值为7.25mm。由此可以有效验证,在既有的坐标系条件下进行三维后方距离交汇参数计算工作中,通过使用解析消元工的方法,相比于几何消元工作方法更科学合理。因此在本次研究工作过程中,通过使用三维坐标转化方式,对全站一步整平自由测站的三维坐标系进行转换和计算,可以准确测算出全站仪设备中心点位,在整平工作状态下的三维坐标体系,在整个结算工作效果方面相对比较理想。但是通过使用该方法进行全站仪测算,整平过程中所对应的三维坐标系,需要事先在全站仪设备处于不整平状态下来进行使用,对仪器设备的中心点,三维坐标需要设置一个已知参数值[4]。
4 全站仪不整平测量可行性实验工作分析
为了深入研究全站仪不整平测量技术在矿山建筑等测量工作中的应用,展开了如下实验工作。在本次试验工作当中,首先将全站仪设备设置在测量场地区域的中间位置,Z1 同时设置出温度气压以及棱镜的常规参数数值,然后通过将4 个带有精密基座的棱镜进行精确调整,并且设置在实验场地的4 个不同位置,可以形成相应的观测网格模型,如图1 所示。
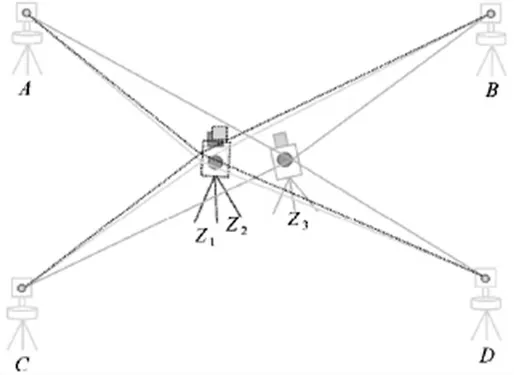
图1 观测网络模型
在精确整平以及补偿器开放的工作状态下,通过使用自动照准功能,使用全原方向距离观测工作方法,对以上4 个目标点进行深入测量,目标点位A、B、C、D 4 个不同的三维坐标对应标记,然后设置全站仪脚架。在原地关闭补偿器指通过旋动基座位置上的角螺栓旋转,保证全站仪设备处与不整平的工作状态,此时目标点到A、B、C、D 点位置保持不动,同时不需要转动棱镜的工作方向,此时也称之为小倾斜角,不整平测量工作根据上述测量工作方式进行两次观测,一次记录目标点为A、B、C、D 共4 个不同的三维坐标系。此时仪器设备的中心点位置会产生相应的变化,将变化之后的测站点设置为Z2,最后将全站仪设备直接移动到距离测量点Z1 5m 左右的位置,此时仍然需要关闭补偿器设备,全站仪设备仍然处于不整平的工作状态,设定的目标点A、B、C、D 仍然保持不动,且不需要转动棱镜的工作方向,此时也称之为大倾斜角,不整平的测量实验,同样的测量工作方式分为观测分析,依次记录目标点A、B、C、D 的三维坐标,此时所获取的测量点位置设定为Z3[4]。
通过对上述三个不同的测量实验点位,均可以获取目标点A、B、C、D 的三维坐标,通过探索全站仪整平和不整平测量工作结果之间,是否存在某种对应工作关系,以全站仪左侧测量作为三维坐标系,计算了目标点A、B、C、D 之间的平面间距角度,以及空间距离的差异性情。通过对比和分析小倾斜角不整平测量工作方法、整平处理以及大倾角不整方方式测量工作方式,对目标点位所对应的空间距离大小进行确认。在测量工作过程中全架仪设备在三种不同的工作状态下进行测量,计算得出的6 条目标点之间的空间距离差值大约在1mm 误差。由此可以得出结论:全站仪整平和不整平测量工作过程中,目标点位之间的空间距离并没有发生相应的变化,此时说明不整平工作状态下全站仪测量空间所对应的坐标参数是准确的状态。
5 结语
通过本文的分析,对智能型全站仪设备不整平、测量技术相关应要点进行深入和探索,并且通过整平和不整平工作状态下的相关测量实验工作分析得出了全站仪不整平、三维后方距离交会测量及其相关算法和对应数据的计算处理工作方法,有效保证该项技术在矿山以及建筑行业当中可以发挥出关键性的作用和效果。
