空间站斯特林制冷机用磁阻尼吸振器开发
2022-01-01罗高乔倪竹青吴维薇姚晓蕾张永清田兴华李家柱朱魁章
张 银 罗高乔 王 波 倪竹青 吴维薇 姚晓蕾 刘 婷 张永清 田兴华 李家柱 王 珂 张 驰 朱魁章 王 帅
(1 低温技术安徽省重点实验室 合肥 230088)
(2 中国电子科技集团公司第十六研究所 合肥 230088)
(3 中国科学院太空应用重点实验室,中国科学院空间应用工程与技术中心 北京 100094)
(4 合肥工业大学噪声振动工程研究所 合肥 230009)
(5 北京空间飞行器总体设计部 北京 100094)
(6 空间热控技术北京重点实验室 北京 100094)
1 引言
2022 年中国空间站将完成建设,将开展空间生命、生物、医学及材料等科学实验研究,需要在舱内温度可控的低温环境中保存实验样品。基于此目的,在实验舱I 科学手套箱与低温存储柜中安排了低温存储装置(图1 所示),该装置提供3 种不同保存温度(-80 ℃、-20 ℃、+4 ℃),为开展空间科学实验提供保障。低温存储装置的主要技术指标:具备3 个独立存储区,冷量容积分别为20 W/25L、25 W/15 L和20 W/15 L;总重110 kg;峰值功耗≯550 WDC;微振动≤8 mg(350 Hz 以内),产品实物图如图2 所示[1]。

图1 空间站实验舱I 低温存储装置示意图Fig.1 Image of cryogenic storage device in China Space Station Laboratory Modules I

图2 低温存储装置产品实物图Fig.2 Physical drawing of cryogenic storage device
根据空间站低温存储环境需求,国内外宇航领域,特别是载人航天领域,均已开展了空间低温存储装置的研制,包括国际空间站上的SOR/F 低温冰箱、MELFI 冰箱、GLACIER 冰箱、TWINBIRED 低温冰箱以及中国空间站低温锁柜等。除国际空间站MELFI冰箱采用逆布雷顿和中国空间站低温锁柜采用热电制冷外,其它空间用低温存储装置都采用气体轴承斯特林制冷机做为冷源(共46 台,90%以上)[2]。
中国在空间站低温存储装置起步较晚,综合考虑体积、功耗、效率和寿命等限制,在充分分析国际空间站的技术路线,-80 ℃存储区采用斯特林直冷方式,即在-80 ℃箱体平板热管外侧配置1 台气体轴承斯特林制冷机,如图3 所示。气体轴承斯特林制冷机采用气体轴承支撑技术,是全球范围内相同制冷量下效率最高、体积最小、重量最轻以及可靠性最高(MTTF:12 000 h)的制冷机[3-4],该机型与国际空间站的气体轴承斯特林制冷机相同,产品实物如图4 所示。

图3 -80 ℃箱体斯特林制冷机主动制冷Fig.3 Active refrigeration of Stirling cryocooler in -80 ℃cabinet

图4 气体轴承特林制冷机产品图Fig.4 Structure of gas-bearing Stirling cryocooler
低温存储装置安装在科学手套箱设备下方,手套箱主要为在轨医学、细胞等科学实验,其内部机械臂对于振动极为敏感(末端位移≤2 μm),要求其下端低温存储装置载荷振动输出≤8 mg(350 Hz 以内)。气体轴承斯特林制冷机为整体式自由活塞结构形式,其效率、体积、重量及可靠性优势明显,但这种单压缩机单活塞结构导致制冷机运行时其轴向振动较大,从而可能导致与之相连的低温存储装置振动和噪声超标,即影响手套箱机械臂细胞穿刺操作和航天员在轨正常生活(稳态噪声≤50 dBA)。因此,解决中国空间站斯特林制冷机振动和系统噪声极为迫切,同时在有限的体积、重量、功耗和成本内实现减振性能更是难点。斯特林制冷机一般通过被动减振和主动减振两种方式对的振动进行抑制[5-9]。通过对比分析,主动减振需要消耗额外的驱动资源,且需要增加高精度传感器、分析电路和驱动控制电路等,系统和算法复杂且成熟度不高,应用相对较少。传统被动吸振器采用弹簧振子的简谐振动的反共振原理进行减振,该吸振器结构简单应用广泛,但是减振频率单一,无法对高阶减振,吸振效率相对较低(基频衰减很难达到90%),不满足对于振动敏感的应用领域。目前,满足中国空间站低温存储装置气体轴承斯特林制冷机减振需求的吸振器暂未见报道。
中国空间站采用了制冷机与-80 ℃箱体联合减振隔振方案(如图5 所示),将斯特林制冷机与-80℃箱体刚性固定,在制冷机尾端附加一个由振子和弹簧组成的磁阻尼吸振器,首先通过磁阻尼吸振器对制冷机和箱体进行减振,再通过弹簧(隔振器)悬吊制冷机和-80 ℃腔体进行隔振,从而保证低温存储装置微振动和噪声满足指标要求。

图5 制冷机与-80 ℃箱体联合减振隔振示意图Fig.5 Schematic diagram of combined vibration reduction and isolation of cooler and -80 ℃cabinet
本文对空间站斯特林制冷机振动输出进行了测试,开展了磁阻尼吸振器设计和开发,并进行磁阻尼特性影响分析,开展吸振器减振性能测试试验研究。
2 磁阻尼吸振器设计
磁阻尼吸振器是在被动减振器基础上布置永磁组件和磁极,利用磁阻尼吸振器板簧组件和动子形成的弹簧振子抵消基频振动,并通过磁钢与磁极的相对运动在轴上产生了电涡流,电涡流产生了反电动势阻碍磁钢的相对运动,进一步抵消振动力,可以对高阶振动产生抑制作用,在仅增加磁极和永磁组件且不消耗其它额外的资源情况下,提高吸振器的吸振能力和吸振效率。
2.1 参数设计
中国空间站斯特林制冷机的运行频率80 ±5 Hz,因此,本磁阻尼减振器主要针对运行频率为80 Hz进行设计,详细的设计流程如图6。
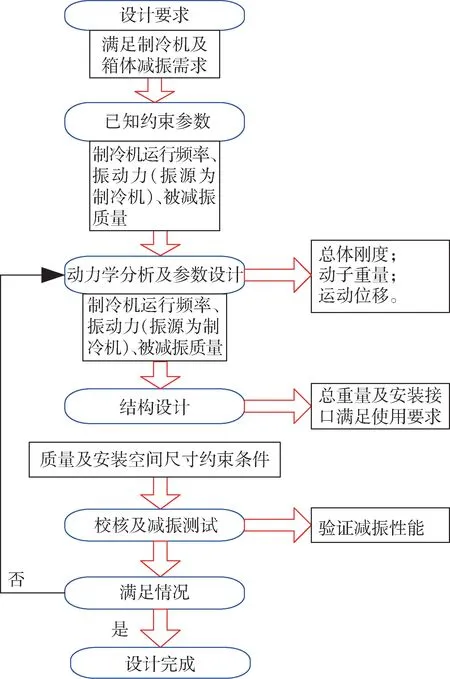
图6 吸振器设计流程图Fig.6 Design flow chart of column vibration absorber
2.1.1 基本参数
低温存储装置采用制冷机与-80 ℃箱体联合减振隔振方案(图7 所示),即通过吸振器衰减制冷机本体的振动,再通过8 个隔振弹簧悬吊制冷机和-80 ℃箱体进行隔振,从而在不改变制冷机特性的前提下,保证低温存储装置传递到手套箱机械臂末端的振动响应不超过2 μm。因此,吸振器被减振的对象为制冷机和-80 ℃箱体,被减振设备的基本参数如表1 所示。

图7 制冷机与-80 ℃箱体联合减振隔振示意图Fig.7 Schematic diagram of combined vibration reduction and isolation of cooler and -80 ℃cabinet
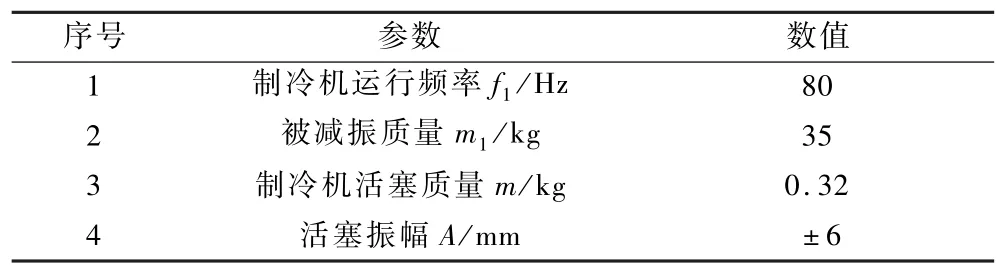
表1 制冷机和-80 ℃箱体运行基本参数Table 1 Basic parameters of cooler and -80 ℃cabinet
2.1.2 动力学分析
简化吸振器为无阻尼单自由度系统(空气阻尼对吸振器影响很小),见图8。

图8 振动系统的动力学模型Fig.8 Dynamical model of vibration system
根据图8 所示的动力学模型,可得到制冷机和-80 ℃箱体部分的振动微分方程:

式中:m1为制冷机和-80 ℃箱体总质量;m2为吸振器动子质量(吸振器运动部分质量);K1为制冷机和-80 ℃箱体振动等效刚度;K2为吸振器等效刚度;FA为制冷机和-80 ℃箱体对框架的力;ω为制冷机振动频率,即制冷机运行频率。
解得:

式中:A1为制冷机和-80 ℃箱体振动幅值;A2为吸振器动子的振动幅度(运动位移);ωb为吸振器的固有频率。
当ω=ωb时,可得:

当ω=ωb时,制冷机和-80 ℃箱体的振幅为0,吸振器的振幅A2=FA/K2。说明当吸振器的固有频率与制冷机和-80 ℃箱体的振动频率一致时,吸振器减振效果最佳。
吸振器固有频率计算公式:

制冷机为自由活塞无板簧支撑结构,活塞运动可以简化为简谐运动,制冷机的活塞位移随时间变化近似一个正弦波,则活塞的位移可描述为:

其加速度为:

根据牛顿第三定律,作用力与反作用力相等,再根据牛顿第二定律可得制冷机界面处的反作用力为:

将上式代入式(4)可得到吸振器的运动位移:

将表1 中的运行参数代入式(5)和(9),计算结果如表2 所示。
综合考虑吸振器总刚度、运动位移、可靠性以及重量(吸振器总质量,包括:板簧、动子、连接杆及支撑部件的质量之和)等因素,选择了表2 的第6 组参数,即动子质量600 g,吸振器位移3.2 mm,总刚度151.443 N。

表2 吸振器主要参数设计结果Table 2 Design results of main parameters of vibration absorber
根据吸振器的总体刚度确定减振板簧的数量,并结合质量、安装空间尺寸等相关约束因素,进行减振板簧的型线和尺寸设计,以保证动力吸振器板簧具有较高的可靠性。吸振器板簧总刚度为K2=151.443 N/mm,确定板簧片数为11,单个板簧刚度为:k=151.443/11≈13.77 N/mm,由此可以获得吸振器的主要设计参数如表3。

表3 吸振器最终参数Table 3 Final design result of vibration absorber
2.1.3 板簧设计
板簧的型线常见为渐开线或阿基米德螺旋线,此类型线在板簧发生形变过程中应力分布均匀,不会出现较大的应力集中。上海交通大学陈楠博士利用经典材料力学和结构力学的理论推导出弹簧刚度与其几何参数的关系[22],简化设计过程,其推导的关联公式如式(10)。

式中:n为渐开线臂条数;N为渐开线圈数;R=为基圆半径,φ为渐开线渐开角;G为剪切弹性模量;hs为弹簧厚度;b为悬臂梁的宽度,为膜片板簧刚度修正参数;Cr为悬臂板簧形变修正参数。
按照式(10)计算得到的型线参数设计的板簧的三维结构模型如图9 所示,利用ANSYS 等结构力学仿真软件对板簧的刚度和应力分布情况进行迭代计算分析,直到仿真计算结果满足:板簧计算刚度K3和设计刚度k相差在5%以内;最大集中应力控制在材料疲劳极限70%以内。

图9 板簧结构示意图Fig.9 Structural diagram of leaf spring
板簧的变形计算和应力计算结果分别如图10 和图11 所示。从变形计算中可知:在施加50 N 载荷作用下,板簧变形量3.547 2 mm,因此可以获得板簧刚度值K3=50 N/3.547 2 mm=14.09 N/mm,计算刚度K3和设计刚度k相差在2.3% (5% 以内),满足设计指标要求。在施加50 N 载荷作用下,板簧的最大集中应力481.86 MPa(如图11 所示),最大集中为材料材料的疲劳极限的62% (70% 以内)。从图12 材料疲劳曲线中可知,当应力值低于710 MPa 时,板簧可以无限次循环,因此板簧设计寿命满足整机的寿命要求。

图10 板簧变形云图Fig.10 Deformation distribution diagram of leaf spring

图11 板簧应力分布云图Fig.11 Stress distribution diagram of leaf spring
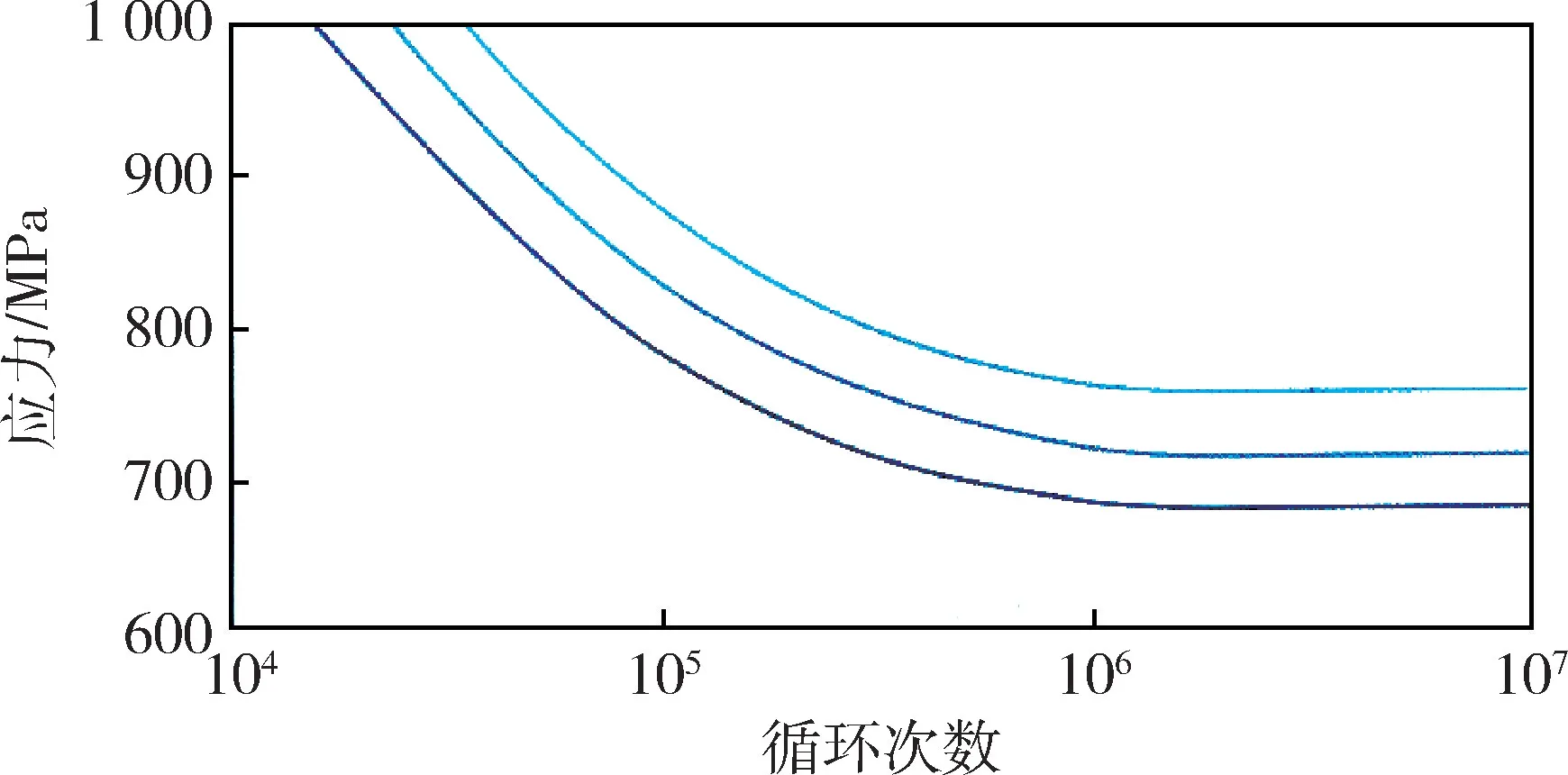
图12 板簧材料疲劳曲线Fig.12 Fatigue S-N curves of leaf spring materials
2.2 结构设计
磁阻尼吸振器由吸振器轴、动子组件、板簧组件及紧固件等组成,吸振器剖视图详见图13,其中,动子组件主要有磁极、磁钢及法兰组成,板簧组件包括若干平行设置的板簧、设置在相邻板簧外周之间的大调整垫片以及设置在相邻板簧内周之间的小调整垫片组成,吸振器产品实物如图14 所示。

图13 磁阻尼吸振器剖视图Fig.13 Cutaway view of magnetic damping vibration absorber

图14 磁阻尼吸振器产品实物图Fig.14 Structure of magnetic damping vibration absorber
磁阻尼吸振器通过钛合金的连接支座安装到制冷机的尾部,制冷机尾部预留安装孔及定位孔用于吸振器的安装固定及定位,磁阻尼吸振器与制冷机安装结构如图15 所示。

图15 制冷机和吸振器产品实物图Fig.15 Structure of Stirling cryocooler with magnetic damping vibration absorber
2.2.1 吸振器轴材料仿真分析
为研究吸振器轴材料对减振效果的影响,分别对磁阻尼吸振器轴不同材料(导磁和不导磁)进行仿真分析,静态仿真结果如图16 和图17 所示。从图16 中可知,当轴为不导磁材料时,在吸振器轴附近无电涡流,无磁力线出现,仅在磁钢与外磁极处出现磁力线,即吸振器轴为非导磁材料时无磁阻尼特性。从图17 中可知,当吸振器轴为导磁材料时,在吸振器轴和上下板簧组件处出现较强的电涡流,且磁力线分布密集,即吸振器运动时产生了磁阻尼产生了抑制作用。

图16 轴为不导磁材料时静态仿真云图Fig.16 Static simulation cloud diagram of non-magnetic material

图17 轴为导磁材料时静态仿真云图Fig.7 Static simulation cloud diagram of magnetic conductive material
2.2.2 不同位移时磁阻尼力的仿真分析
为获得磁阻尼吸振器不同位移下磁阻尼特性,分别对磁阻尼吸振器运行不同位移下的电磁力进行动态仿真分析,吸振器运动时力随位移变化曲线详见图18 所示,不同位移下的磁场及磁感线分布详见图19—图22 所示。在进行磁阻尼吸振器动态仿真分析时,电磁力与吸振器的运动位移相反,表现为负值。从图18 中可知,随着吸振器位移逐渐增加,电磁力表现为先逐渐增加后逐渐减小趋势,在位移为2 mm处存在一个与运动方向反向的最大力5.5 N,因此磁阻尼吸振器运动而产生的电磁力能够发挥减振功能。

图18 电磁力随吸振器运动位移变化曲线Fig.18 Curves of electromagnetic force versus displacement of vibration absorber

图19 0 mm 位移时磁场分布图Fig.19 Magnetic field distribution of 0 mm displacement

图20 1 mm 位移时磁场分布图Fig.20 Magnetic field distribution of 0 mm displacement

图21 2 mm 位移时磁场分布图Fig.21 Magnetic field distribution of 2 mm displacement

图22 3 mm 位移时磁场分布图Fig.22 Magnetic field distribution of 3 mm displacement
3 磁阻尼吸振器试验研究
3.1 输出力试验研究
为更好的了解制冷机运行微振动的特性,搭建微振动测试平台进行制冷机振动输出力测试,测试平台为高精度的微振动力的测量平台,系统采用4 通道并配置采集软件,传感器采用微振动三向测力传感器,内置3 方向石英测力,传感器分辨率<0.01 N,见图23 所示。

图23 三向测力传感器Fig.23 Three-way load cell
为避免制冷机其它部分的对本身的影响,测试对象是制冷机,无动力吸振器等其它附件,制冷机采用液冷散热方式(水冷套)。为方便制冷机驱动频率变化,制冷机采用变频电源驱动,频率精度为0.1 Hz。测试装置、方法及测试现场如图24 所示。测试系统底部为大理石平台,平台上面是刚性支撑平台,刚性平台上方为三轴向力传感器,传感器上面是制冷机,通过转接板将制冷机冷头与测试平台刚性连接,以保证足够的刚度,在冷头与传感器之间增加隔热板(导热系数很低的玻璃钢),避免制冷机产生的低温环境对传感器精度产生影响。对制冷机不同频率下的微振动输出力进行测试。

图24 制冷机振动测试实验现场图Fig.24 Field diagram of Stirling cryocooler vibration test
为获得制冷机运行频率对输出力的影响,分别对制冷机输入功率100 W,运行频率50—90 Hz(间隔5 Hz)制冷机输出力进行测试,测试结果详见图25 所示。从图中可知,制冷机微振动输出力随运行频率呈抛物线趋势,驱动频率50 Hz 时,振动力最小为183.5 N;运行频率80 Hz 达到最大值,此时制冷机的振动力最大达到482.78 N;运行频率大于80 Hz 时,制冷机输出力逐渐减小。驱动频率80 Hz 输出力最大的测试结果与制冷机80 Hz 性能最佳结果一致。因为,此时制冷机运行频率达到活塞运行的共振频率,此时制冷机输出力最大。
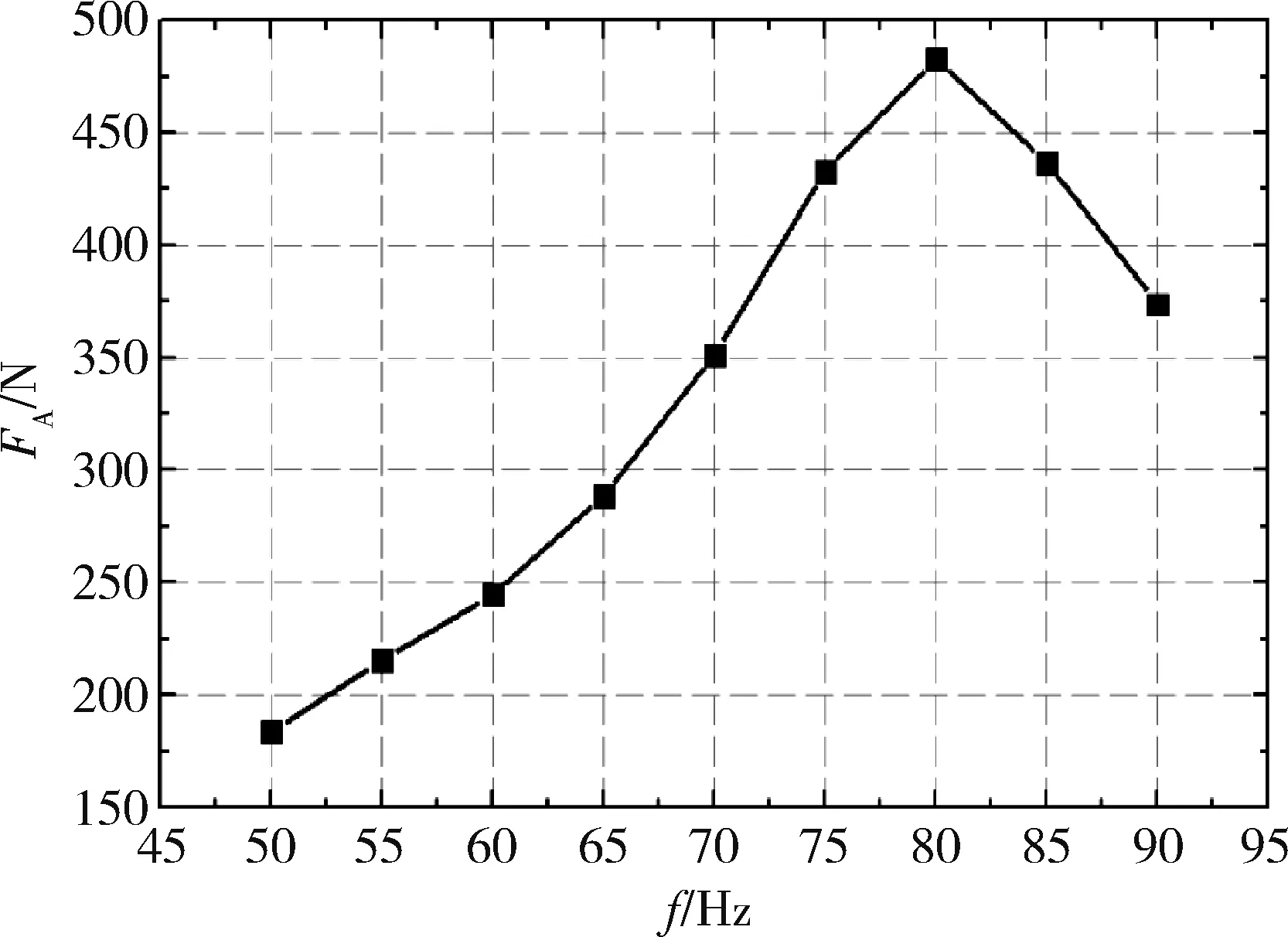
图25 制冷机振动力随频率变化曲线Fig.25 Variation curve of vibration force of Stirling cryocooler with frequency
制冷机驱动频率80 Hz 输出功率100 W 振动力波形图详见图26 所示,从测试结果可以看出,制冷机振动力振幅为482.78 N,呈标准正弦波动趋势,排除计算和测试的误差,冷头振动测试结果与计算结果484.619 N(表2)结果一致,证明计算的有效性。
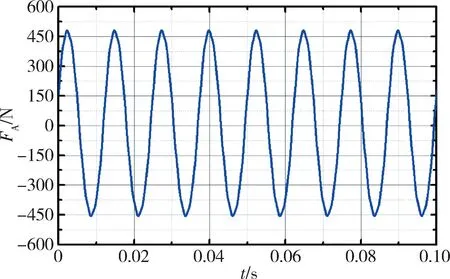
图26 制冷机振动力波形图Fig.26 Vibration force waveform of Stirling cryocooler
3.2 减振性能研究
搭建微振动(加速度)测试平台,测试系统如图27 所示,其中试验系统包括:制冷机(安装磁阻尼吸振器)、-80 ℃箱体、测试框架、隔振器、高精度数据采集系统、高精度加速度计及地面恒温水槽。

图27 试验系统示意图Fig.27 Schematic diagram of test system
采用方钢加工的测试框架代替低温存储装置框架,测试工装框架基频刚度大于500 Hz 不影响系统微振动测试结果。微振动测试系统采用便携式动态信号分析仪并配置采集软件,分辨率0.002 m/s2(RMS),灵敏度100 mV/g,5% 轴向频率范围为2—5 000 Hz。地面恒温水槽对制冷机散热。-80 ℃箱体为试验件其重量和质量特性等均与低温存储装置正样产品状态一致,加速度传感器安装到制冷机质心位置。为方便吸振器调试,制冷机采用变频电源驱动,频率精度为0.1 Hz。
为获得磁阻尼吸振器减振性能,分别对制冷机有、无吸振器的微振动进行测试。首先,通过调整变频电源的驱动频率,用驱动频率适应吸振器的减振频率,当微振动最小时为最佳减振频率,找到吸振器频率后与制冷机最佳运行频率(80 Hz)对比,如吸振器最佳减振频率与制冷机最佳运行频率有偏差,并通过调整吸振器的刚度和质量,当如最佳减振频率<80 Hz,可通过减小质量环重量或增加板簧刚度;当如最佳减振频率>80 Hz,可通过增加质量环重量或减小板簧刚度,直至吸振器最佳减振频率在80 Hz 附近;然后调整驱动频率为最佳减振频率(80 Hz),分别测量不同输入功率下制冷机质心的微振动(基频、二阶及时域等);最后,制冷机拆下吸振器,测试同驱动频率同输入功率制冷机的微振动,测试试验结果如汇总表4 所示。

表4 制冷机微振动测试结果Table 4 Vibration test results of Stirling cryocooler
当制冷机未安装吸振器时,制冷机本体的振动随着输入功率增加呈增加的趋势,当输入功率100 W时,制冷机基频加速度256 mg,时域加速度达到802.95 mg,输入功率增加到200 W,制冷机基频加速度增加到370.7 mg,时域加速度增加到1240.5 mg。微振动及吸振效率随输入功率的变化曲线详见图28和图29 所示,从图中可知:制冷机安装磁阻尼吸振器后制冷机的振动(基频、二倍频和时域加速度)被明显抑制,输入功率100 W 时吸振器将制冷机的基频加速度从265 mg 降低到14.25 mg,基频吸振效率0.054(吸振效率定义为:安装吸振器后的振动加速度/无吸振器振动加速度);制冷机的时域加速度从802.95 mg 降低到98.51 mg,时域吸振效率0.123;输入功率200 W 时吸振器将制冷机的基频振动从370.7 mg 降低到73.92 mg,基频吸振效率0.199;制冷机的时域振动从1 240.5 mg 降低到220.6 mg,时域吸振效率0.177;输入功率100 W 时吸振效率达到了0.05,磁阻尼吸振器大幅降低了制冷机振动输出,吸振效率优于传统被动减振器(吸振效率最多仅到0.1),制冷机振动输出满足空间站低温存储装置的技术指标要求。

图28 制冷机微振动随输入功率的变化曲线Fig.28 Variation curves of cryocooler with different input power
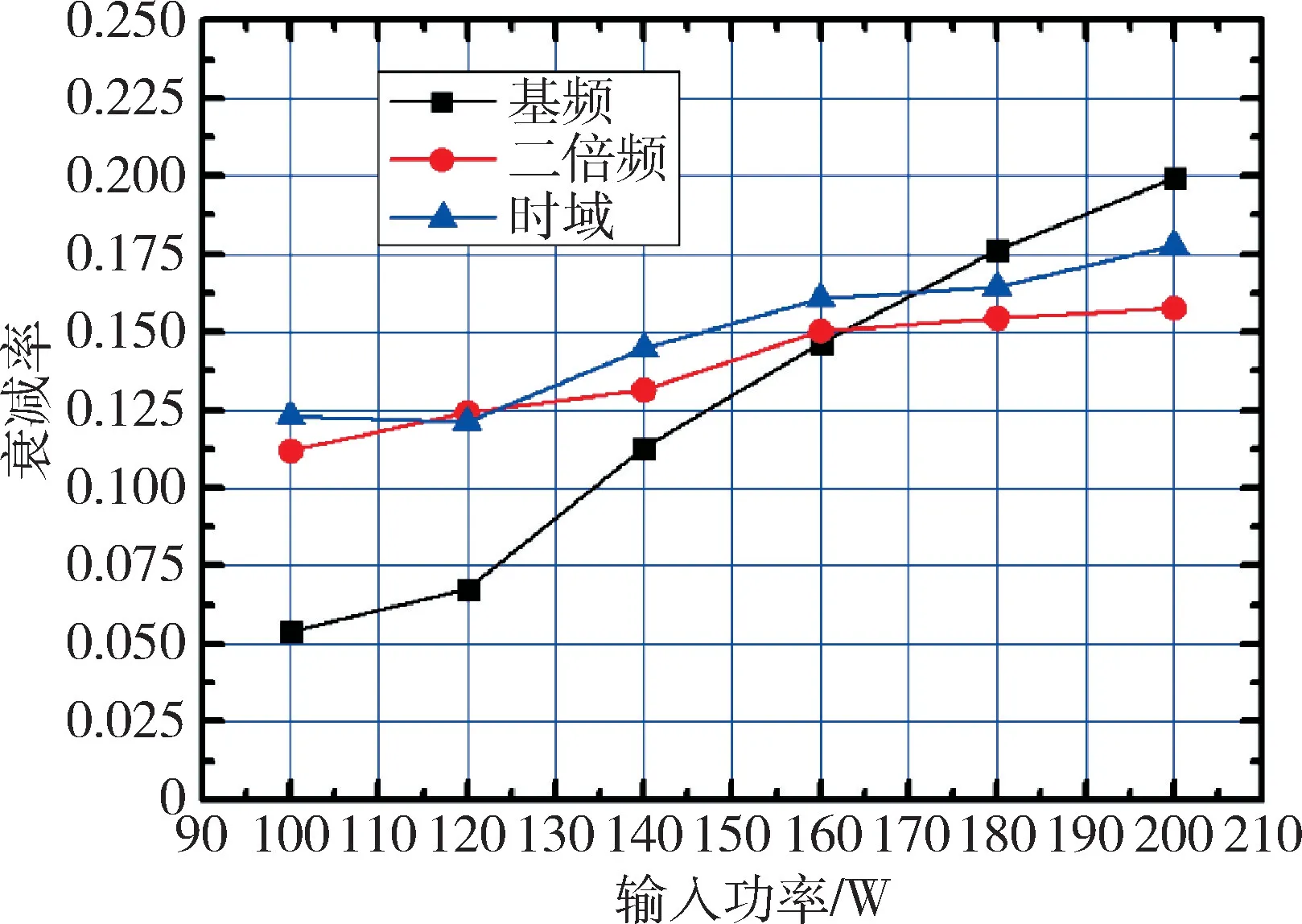
图29 吸振效率随输入功率的变化曲线Fig.29 Variation curve of vibration absorption efficiency with input power
4 结论
对空间站低温存储装置斯特林制冷机振动输出进行了测试,采用理论分析、数值仿真及实验的方法开展了磁阻尼吸振器设计和开发,成功开发了空间站低温冰箱斯特林制冷机用磁阻尼吸振器,并进行试验测试,测试结果表明:
(1)制冷机在无吸振器驱动频率80 Hz,输入功率100 W 时,轴向输出力随时间呈正弦波趋势,最大达到482.78 N,并且振动输出力测试结果与计算结果484.619 N 一致。
(2) 制冷机安装磁阻尼吸振器后,当输入功率100 W 时,制冷机基频振动从265 mg 降低到14.25 mg,基频吸振效率0.054;时域振动从802.95 mg 降低到98.51 mg,时域吸振效率0.123;输入功率增加到200 W 时,吸振器将制冷机的基频振动从370.7 mg 降低到73.92 mg,基频吸振效率0.199;时域振动从1240.5 mg 降低到220.6 mg,时域吸振效率0.177。
(3)磁阻尼吸振器大幅降低了制冷机振动输出,吸振效率优于传统被动减振器,制冷机振动输出满足空间站低温存储装置技术指标要求。该吸振器后续在空间站低温存储装置使用还需要对吸振器的频率适应性、可靠性及环境适应性进行研究。
