无创呼吸机高频震荡通气系统研究与设计
2021-12-31袁越阳陈宇清邓科焦杨马小林周理
袁越阳,陈宇清,邓科,焦杨,马小林,周理
1.湖南城市学院 机电工程学院,湖南 益阳 413099;2.上海市胸科医院 呼吸内科,上海 200030
引言
现有常规有创和无创通气主要是以提供充足的潮气量(健康成人潮气量约为400~600 mL)为目的,而对于重症患者通常需要采用高通气压力来满足需求的潮气。但这种高通气压的通气方式容易引起气道压损伤等问题[1-2],于是有研究者提出了另外一种不同于常规通气的通气方式——高频通气[2-3]。高频通气是一种采用通气频率在120次/min(或者2 Hz)以上的通气方式。以往试验表明其最显著的特点[4-7]:① 输出到呼吸道的平均压小于常规通气的压力;② 潮气量小于常规通气的潮气量,甚至可以小于呼吸道解剖死腔(约为潮气量的30%~40%),仍能满足患者的通气需求;③ 采用高频通气可以避免或减小通气过程对呼吸道等器官的损伤。
高频通气的发展,最早可以追索到十九世纪中后期。早在1979年,研究者在对狗做呼吸暂停治疗的实验过程中,发现高频通气具有很好的治疗效果,引起人们对高频通气的关注,并不断加以研究与实验[8-10]。先后在有创(通常采用经鼻、经口、经气管开口插管)呼吸机上提出和实现了高频正压通气、高频喷射通气和高频震荡通气(High Frequency Oscillation Ventilation,HFOV)等几种通气模式。
为了实现高频气流气压的输出,传统的方式是采用活塞式风箱或大功率扬声器来产生。然而,采用该方式所产生的震荡气压在通气过程中损失高达90%以上[11-13](震荡频率范围1~15 Hz),难以实现需有一定漏气量的采用面罩的无创通气方式,如美国SensorMedics的SensorMedics3100A和SensorMedics3100B高频呼吸机和德国Drager具有高频震荡通气功能的Babylog 8000呼吸机等均需采用插管通气方式。
为了实现无创高频震荡通气模式,避免采用插管给患者带来的通气并发症,本文就包括硬件电路、气流通道和控制程序在内的无创气道正压高频震荡呼吸机系统展开了研究。
1 电气系统
如图1所示,呼吸机电气系统包括硬件电路(如虚线框外部所示部分)和呼吸机内部气流通道(如虚线框内部所示部分)。
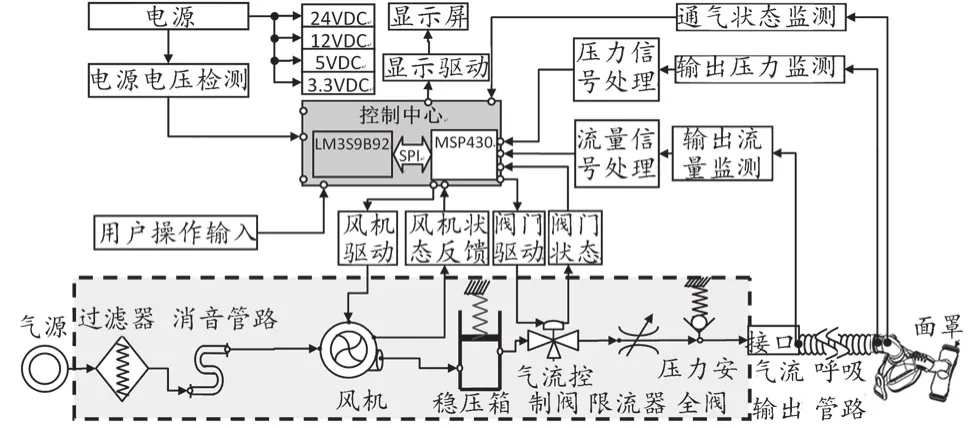
图1 硬件电路及气路系统框图
1.1 控制电路
控制电路系统以控制中心为核心器件,按照功能划分,外围电路主要包括:电源模块、显示模块、操作输入模块、风机控制模块、阀门控制模块和监测模块等部分。控制中心采用双MCU(分别为美国TI公司生产的LM3S9B92和MSP430F5418)。其中,LM3S9B92是TI公司生产的一款运算能力较强的ARM MCU,在此主要用于负责用户界面(UI)的操控和数据管理等;MSP430F5418是TI公司生产的另一款控制能力较强的MCU,在此专门用于控制气流和气压等。两个MCU之间通过SPI总线进行数据通信,采用既分工又合作的运行机制,来提高系统数据处理能力和控制实时性。同时,两个MCU还彼此相互监测,以防其中之一出现故障而造成治疗风险。电源模块将220 V(或110 V)交流电源经整流、降压、稳压等处理后,输出四路独立的低压直流电源,分别给控制器及其他电路提供工作电压。其中所输出的直流24 V给电机和电磁阀门供电,12 V给显示部分、风机和阀门的驱动控制电路供电,5 V给控制单元外围电路供电,3.3 V给控制单元供电。显示屏采用彩色LCD来显示呼吸机的参数、运行状态和气流气压波形等信息。用户可以通过触摸屏上提供的虚拟按键来操作呼吸机。同时为了降低按键等出现故障而不能操作呼吸机的风险,用户还可以通过按键和调节旋钮输入相关参数和指令来对呼吸机进行操作。风机控制模块和阀门控制模块分别包括高速风机及其驱动与状态反馈部分和阀门及其驱动与状态反馈部分,两者分别形成一个闭环控制电路。监控模块主要包括气流监测部分、气压监测部分和通气状态监测部分。监控模块与风机和阀门闭环控制电路组成一个嵌套闭环控制系统。
1.2 气流通路
呼吸机内部气流沿图1虚线框内的箭头所指方向,从气流输入口流向气流输出口。首先,为了降低气流冲击所产生的噪声,来自气源的气流经过滤器清洁后进入S型消音管路(减小气流冲击力,降低噪音),随后由风机泵出。然后为了保证阀门输入气流的平稳恒定,气流经稳压箱稳压后再经气流控制阀[13-14]控制输出。从控制阀入口输入的气流,经过控制阀时被分成两部分,一部分从输出口流出,另一部分从控制口流入到大气。控制阀的输出气流等于输入气流与控制口流出气流之差。在输入气流恒定时,调节阀门控制口开度,即增大或减小控制口输出气流,则减小或增大阀门的输出气流。气流从阀门输出口输出后,为了呼吸道安全,通常输出气流流量不超过200 L/min,气压不超过规定的60 cmH2O的要求[15],先经安全限流后再经压力安全阀,然后由呼吸管路输出到患者面罩端。
2 软件系统
基于硬件电路和气流通路的设计,呼吸机控制中心对气流、气压的控制和计算过程如图2所示。主要设定参数包括吸气压(Inspiratory Positive Airway Pressure,IPAP)和呼气压(Expiratory Positive Airway Pressure,EPAP)、震荡频率、震荡幅度(峰—峰值的一半)和通气模式等。

图2 参数计算和控制框图
运行过程中,系统实时测控和计算呼吸机输出气流QV(t) 、面罩端压力P(t)、漏气流QMLEAK(t)、通气对象的呼吸气流Q(t) 、吸气时间TIN、呼气时间TEX、每分钟呼吸次数(Breaths Per Minute,BPM)、实时吸气压IPAP(t)、实时呼气压EPAP(t) 、漏气流QMLEAK等。IPAP(t)和EPAP(t)分别为t时刻震荡压POSC叠加在IPAP上和EPAP上的呼吸机实时输出压力。Z(R, I, C)为呼吸道阻抗[16](包括黏性气阻R、惯性气阻I和顺应性C)。PM(t)为t时刻自主呼吸做工产生的呼吸压力。F(P(t))为t时刻计算面罩端漏气流QMLEAK的拟合函数(不同面罩具有不同漏气计算公式)。而呼吸时间比IE、呼吸周期T、潮气量VT、分钟通气量MV、呼吸触发流量阈值DQ和压力阈值DP的计算方法如式(1)所示。
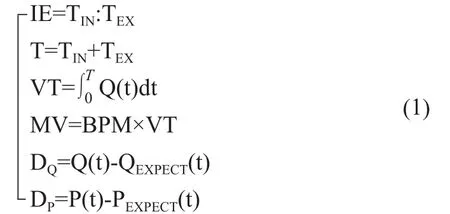
式中Q(t)和P(t)、QEXPECT(t)和PEXPECT(t)分别为t时刻呼吸机输出流量和压力的实测值与预期值。
当DQ>0且DP<0时,吸气触发,进入用户吸气阶段,呼吸机输送到面罩端的吸气压IPAP(t),与用户自身做功产生的气压PM(t) ,共同作用输出气流QV(t)。该气流一部分作为吸气气流Q(t)经气道进入肺部,而另一部分气流则成为QMLEAK经面罩漏气孔排入大气。
当DQ<0且DP>0时,呼气触发,进入用户呼气阶段,用户呼出的气流Q(t)与呼吸机输出气流Qv(t)汇合于面罩内,在呼气压EPAP(t) 的作用下,作为QMLEAK从面罩端漏气孔排入大气。
基于无创正压通气常用的持续气道正压(Continue Positive Airway Pressure,CPAP)、双水平气道正压通气模式,设计对应的高频通气模式:持续正压高频通气模式(CPAP-HFOV)、时间控制高频通气模式(Time-Cycled HFOV,T-HFOV)和自主控制高频通气模式(Spontaneous Controlled HFOV,S-HFOV)。
为了实现正弦震荡气压POSC的输出,采用如式(2)所示的迭代算法[17](包括两次乘法和一次减法运算)来实现震荡信号输出。
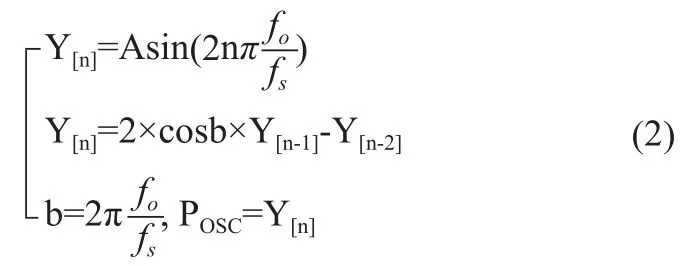
式中A为正弦波震荡幅度,fs是采样频率(步频率),fo是输出的正弦波频率,n为步计数,Y[n]、Y[n-1]和Y[n-2]分别表示第n步、第n-1步和第n-2步的输出。
为了进一步提高MCU的资源利用率,当步频率fs和信号频率fo确定后,程序预先根据式(2)计算输出一个震荡周期的Y[n]数据表并保存在内存中,然后在震荡输出过程中采用查数据表的算法来避免乘法运算。
3 实验
为了测验以上设计所输出的气流气压,如图3所示连接功能调试机和测试设备,建立测试平台。功能机输出的气流依次通过标准呼吸管路(L×Ф=180×2.2 cm)和标准漏气阀(在气压为10 cmH2O的条件下,漏气流为25 L/min,等效面罩的漏气气流)进入主动模拟肺(Series 1101 Breathing Simulator,HANS SIDOLPH)。
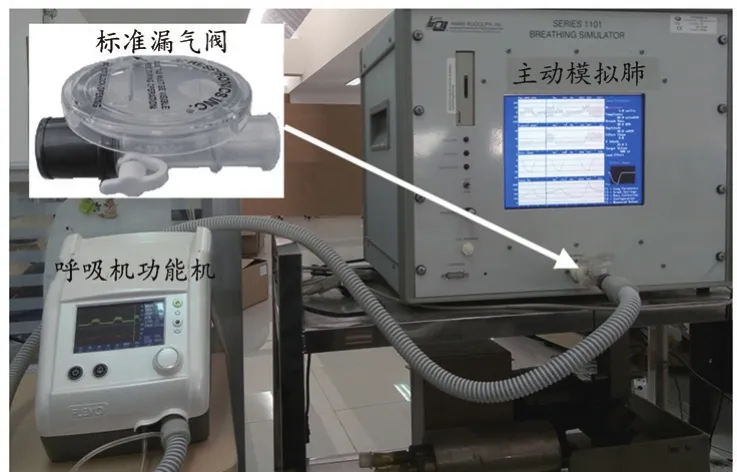
图3 功能测试平台
设置主动模拟肺运行参数[18]:气道阻力Resistance为5 cmH2O/(s.L),肺顺应性Compliance为100 mL/cmH2O,每分钟呼吸次数为20次,呼吸用力幅度为5 cmH2O,吸气时间比33%,目标潮气量600 mL。
如表1所示,在CPAP-HFOV模式下,在呼吸机端设置CPAP为15 cmH2O,震荡幅度为△CPAP分别为5、10、15 cmH2O,震荡频率分别为5、10、15 Hz。在震荡频率为5 Hz时,模拟肺内部所测试震荡压分别为(4.96±0.16)、(8.84±0.25)、(13.59±0.16)cmH2O,所对应的震荡损失分别小于4%、14%和10%。振荡频率为10 Hz时,模拟肺内部所测试震荡压分别为(3.46±0.10)、(8.20±0.48)、(10.53±0.70)cmH2O,所对应的震荡损失分别小于33%、23%和34%。振荡频率为15 Hz时,模拟肺内部所测试震荡压分别为(3.36±0.19)、(5.03±0.12)、(7.95±0.30)cmH2O,所对应的震荡损失分别小于37%、51%和49%。
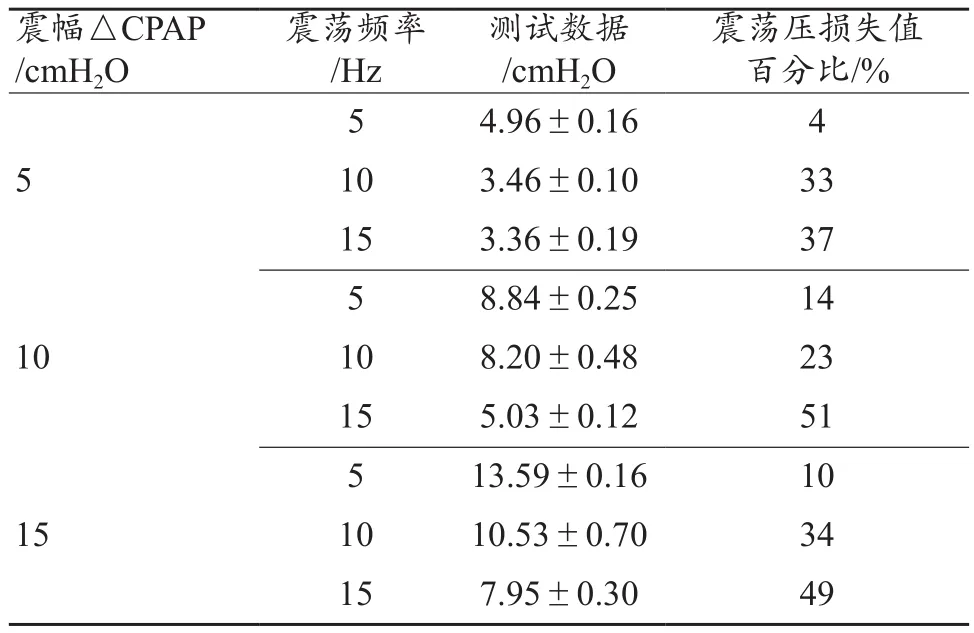
表1 CPAP-HFOV下震荡参数设置值与测试结果
在T-HFOV和S-HFOV模式下,设置呼吸机参数如表2所示。鉴于成人呼吸系统的固有频率为4~8 Hz[19],两种通气模式下的震荡频率均设为5 Hz;在T-HFOV模式下,吸气压IPAP为15 cmH2O,呼气压EPAP为8 cmH2O,吸气相的震幅△IPAP为5 cmH2O,呼气相的震幅△EPAP为3 cmH2O,每分钟通气次数15次;在S-HFOV模式下,吸气压IPAP、呼气压EPAP、吸气相的震幅△IPAP、呼气相的震幅均与T-HFOV模式下的相同。
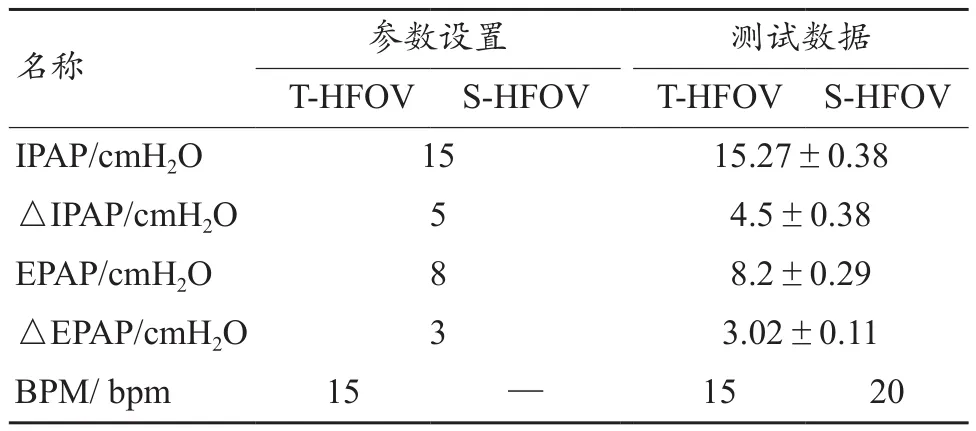
表2 T-HFOV和S-HFOV下震荡参数设置值与测试结果
在T-HFOV和S-HFOV模式下,所得模拟肺“呼吸道”内的平均压IPAP和EPAP分别为(15.27±0.38)cmH2O和(8.20±0.29)cmH2O。吸气相模拟肺“呼吸道”内的高频震荡幅度△IPAP为(4.50±0.38)cmH2O,震荡损失小于18%。呼气相模拟肺“呼吸道”内的高频震荡幅度为(3.02±0.11)cmH2O,震荡损失小于27%。
图4a~c是在三种通气模式下,震荡频率均为5 Hz时测试所得数据波形,包括呼吸道内气流、气压和自主呼吸用力曲线,截取时长10 s。

图4 模拟肺显示通气波形
在CPAP-HFOV模式下,所得面罩端的平均压CPAP为(15.1±0.31)cmH2O,对应所设置的△CPAP,测得面罩端震荡幅度分别为:在震荡频率为5 Hz时的(4.96±0.16)、(8.84±0.25)、(13.59±0.16)cmH2O,振荡频率为10 Hz时的(3.46±0.10)、(8.20±0.48)、(10.53±0.70)cmH2O,振荡频率为15 Hz时的(3.36±0.19)、(5.03±0.12)、(7.95±0.30)cmH2O,呼吸频率为20次/min,与主动模拟肺的设置一致。在T-HFOV和S-HFOV模式下,所得面罩端的平均压IPAP和EPAP分别为(15.27±0.38)cmH2O和(8.2±0.29)cmH2O,面罩端吸气相的高频震荡幅度△IPAP为(4.5±0.38)cmH2O,呼气相的高频震荡幅度为(3.02±0.11)cmH2O。T-HFOV模式下的通气频率为15次/min,由呼吸机确定。S-HFOV模式下的通气频率为20次/min,与主动模拟肺的设置一致。
4 讨论
目前,市面上具有高频震荡通气功能的呼吸机主要有美国的SensorMedics3100系列,但此类呼吸机所输出的震荡压在通气回路中的损失都比较大[20]。为此,近些年来研究者们致力于这方面的研究。如Luca等[21]利用SM3100A呼吸机,采用鼻塞对婴幼儿肺模型和婴幼儿进行了无创HFOV。结果显示,相对插管通气,采用鼻塞通气时,震荡压损失减少了约20%,但仍高达85%以上。2015年,研究者采用较常规压力还高的平均压力,运用鼻塞无创HFOV对体重1.5 kg以下的新生儿进行了临床实验,初步验证了其对新生儿具有良好通气效果[5]。2016年,Luca等[12]又针对婴幼儿肺模型和婴幼儿,采用面罩无创HFOV,实验得到震荡压损失为81%~86%的结果。
相比从通气设备末端的面罩等装置和通气对象来解决或降低损失的思路,本文从呼吸机系统本身出发,通过设计呼吸机内部气路,提出和应用不同于传统的震荡方式和控制方法,较大程度地提高了高频震荡压的输出效率。传统的震荡压产生方式是利用大功率喇叭膜震动或风箱活塞反复运动来产生震荡气流,并将该震荡气流叠加到常规通气气流上。根据气体伯努利方程,由喇叭膜震动或分箱活塞运动产生的气压,当送入到整个呼吸气路中后,由于容积的扩大,导致气体压力降低。而本文所提出的采用活塞对呼吸气路中气流分流来产生震荡的方式,当分流大小变化时,呼吸气路中的气压也随之做相反的变化。关于这一部分,也是我们进一步的研究内容,去探讨两者的震荡气压损失机理上的不同。
5 结论
本研究提出控制阀门对气流进行分流输出来产生震荡的方法,包括硬件电路和气路、控制软件等在内的高频震荡呼吸机控制系统,实现了无创呼吸机的正压高频震荡通气的CPAP-HFOV、T-HFOV和S-HFOV这三种基本通气模式。并以主动模拟肺为通气对象进行无创正压高频震荡通气测验,呼吸机输出到气道的震荡压损失低于20%,且随着震荡频率的升高,震荡气压的损失也会增大,但在频率达到15 Hz时,该损失仍低于50%。
本研究所设计系统提高了震荡输出能力,为进一步的无创高频震荡通气的研究与实验提供了条件。无创高频震荡通气的研究与应用将为广大呼吸患者,特别是重症患者,提供一种备选通气治疗方案。