基于模糊解耦控制的玻璃温室大棚的环境监控
2021-12-31束仁冬孟令启
束仁冬,孟令启,李 进,岳 朗
(安徽科技学院 机械工程学院,安徽 凤阳 233100)
0 引言
随着科技的进步,智能控制技术逐步向农业方向延伸。我国现有的智能农业大棚主要缺点为控制方式单一,绝大多数大棚主要依靠人工控制,少量机械控制也无法完全离开人工。然而,农业大棚是一个动态的环境系统,具有多变量、非线性、时变性、干扰性和强耦合性等特点,环境因素相互耦合且容易受到干扰,不易精确控制。
近年来,哥伦比亚的Pineda 团队[1]设计了温室食用菌的环境控制系统;法国国立园艺研究所的Tawegoum 团队[2]提出了无源空调单元的动态离散模型下的温室追踪;泰国巴吞旺理工学院的Janprom 团队[3]提出了通过SOS 算法调整的PID 控制器调节室内温湿度。国内对温室环境控制研究也发展迅速,李富强等[4]提出了混沌变异POS 算法对控制量进行优化计算;申超群等[5]提出了通过RBF 神经网络和PID 控制结合的控制模型,得到的控制信息可在线进行调整;钱雅楠等[6]提出了模糊免疫PID 算法。
现有研究大部分都忽视了大棚内温湿度等因素滤波偶然性变化和相互的耦合作用,为了提高大棚环境控制精度,本文提出了一种将中位值平均滤波优化算法、解耦控制和模糊PID 控制[7-9]相结合的策略,设计了控制器,最后通过仿真验证了控制方法的精确性。
1 农业大棚系统环境
本系统所研究的农业大棚并非传统薄膜大棚,而是自动化玻璃温室大棚,大棚内部安装了各类环境控制设备,包含遮阳布开关、暖风机开关、喷雾开关、湿帘加风机开关、风扇电机开关和补光灯开关等,见图1。本文研究以温湿度为例。

图1 自动化玻璃大棚概貌图Fig.1 Overview of the automated glass greenhouse
2 控制系统设计
2.1 传统的PID 控制结构
PID 控制器[10-11]是一个在控制系统中常见的反馈系统部件,传统的PID 控制(见图2)因其结构简单、鲁棒性好、工作可靠等优点,在工业控制方面被广泛应用,特别是在对被控对象和参数有一定不确定性、无法进行精确控制时,PID 控制的优点便显现出来。

图2 PID 控制原理框图Fig.2 Block diagram of PID control principle
2.2 解耦控制系统
由于在农业大棚的环境因素之间相互影响产生耦合作用[12-13],使系统性能复杂、难以控制。在出现耦合的情况下,主要采用多输入解耦控制系统。常用的解耦控制包括:静态解耦、基于特征结构配置的解耦法和对角矩阵解耦法等。
本策略采用的是对角阵解耦控制法,以温度、湿度控制解耦为例。
根据对角阵耦合设计要求,

式中,温度、湿度的传递函数分别为Gp11(s)和Gp22(s),温度对湿度影响的传递函数为Gp12(s),湿度对温度影响的传递函数为Gp21(s),其他均为控制器中参数设置。N(s)为解耦器参数,下标1 表示温度,下标2 表示湿度。
因此,输出与输入变量之间应满足以下要求:

式中,U(s)为输入变量,Y(s)为输出变量。
将传递函数代入解耦系统数学模型中得

将N(s)的值代入(3)式得

通过对大棚中数据的采集,运用机理法和实验法结合对数据处理后得到系统中各对象的传递函数见表1。作物生长瞬间产生与消耗的温度、湿度和控制器作用对该因素的影响可以忽略不计。将大棚内部环境看作密闭环境。

表1 大棚环境对象和控制器的传递函数Tab.1 Transfer functions of greenhouse environment object and controller
大棚环境中当温度和湿度处于对应作物最适温度以外时,以温度过低为例,可以打开遮阳布和暖风机,此时棚内温度不变,随着各装置工作时间累积,温度逐渐达到期望值,可以将此看作一阶纯滞后惯性环节,温度初始数学模型为

式中,Ca为大棚空气比热容,Pa为大棚内部压强,Vz为大棚内部体积为风扇电机送风量的平均值为风扇电机频率平均值,a0和a1为整定系数,θs和θz分别为送风温度和室内温度,qz为大棚环境的冷负荷。
2.3 模糊PID 控制
传统的PID 控制虽然简单,但由于其比例、微分和积分的参数固定不变,很难对多参数的非线性、时变控制系统进行较精确的控制。而模糊PID 控制系统具有可以控制非线性系统的特点,主要是由模糊化、模糊推理和去模糊化等几个方面组成,由于其不需要精确的数学模型来控制,所以更适合非线性、时变的控制系统。如图3 所示,将偏差e及偏差变化率ec作为输入,利用模糊变化参数对PID 参数进行调整,以满足不同的e及ec对PID 控制器参数的要求。

图3 模糊PID 控制器结构Fig.3 Structure of fuzzy PID controller
2.3.1 模糊化 首先最重要的一步是模糊化,是将模糊控制中的输入信号量转化为模糊语言变量,该语言变量是一个集合,这里要对温度和湿度进行模糊化。温度、湿度偏差和偏差变化率分别为e1、e2和ec1、ec2。以温度为例得到模糊PID 控制器输出为温度比例调节系数ΔKp1、积分调节系数ΔKi1和微分调节系数ΔKd1。
对温度参数进行模糊化,温度误差e1的变化范围为[-6,6]℃,论域为{-3,-2,-1,0,1,2,3},输入输出的模糊语言变量均为7 级,对应得模糊子集为{NB(负大)NM(负中)NS(负小)ZO(零)PS(正小)PM(正中)PB(正大)},误差量化因子为

式中,m表示变化范围(正大或负大与零的差值),eH和eL表示偏差变化范围的最大值与最小值。温度误差量化因子为

2.3.2 模糊规则 模糊规则的确定是模糊控制的核心。结合实际温度和湿度变化特性,以温度为例制定规则:当|e1|的量偏大时,为将温度尽快恢复到设定值,ΔKp1取较大值;为防止积分饱和,ΔKi1取较小值;为防止发生超调,ΔKd1取较小值;若e1较大,为使系统跟踪控制迅速,考虑到稳定性,避免较大超调,ΔKp1取较大值,ΔKd1取较小值;e1较小时,为使系统稳定,避免振荡,ΔKp1与Ki1应逐渐增大,ΔKd1取较小值;e1*ec1>0 时,为减小超调,提高稳定速度,ΔKp1取较小值;e1*ec1<0时,ΔKd1取中等大小。数值根据模糊规则表和具体情况设置。
2.3.3 去模糊化 去模糊化(解模糊),就是通过模糊隶属度推出清晰的值。
前面设计了三角隶属函数,并采用相同的论域,所以在同一时刻输入输出的模糊变量隶属度相同,基于此,采用重心法计算各输出量的量化值,

式中,Mi为隶属度,Fi为模糊量化值。
最后通过被控对象状态调整,根据3 个输出参数确定PID 参数设计的初始值参量:Kp、Ki、Kd。

式中,α为权值,Kp0、Ki0、Kd0对应V0。
3 仿真分析
本系统采用MATLAB 中的Simulink 软件对农业大棚中的温湿度控制系统进行数据仿真,将传统的PID 控制模型、模糊PID 控制和解耦控制与模糊PID 控制结合的控制模型进行数据对比分析,通过图4 改进后的控制器(将数据处理、解耦控制和模糊PID 控制结合)验证其控制性能。PID 控制根据专家经验和优化调整,得到比例因子的最优解和合适参数的模糊PID 控制器。
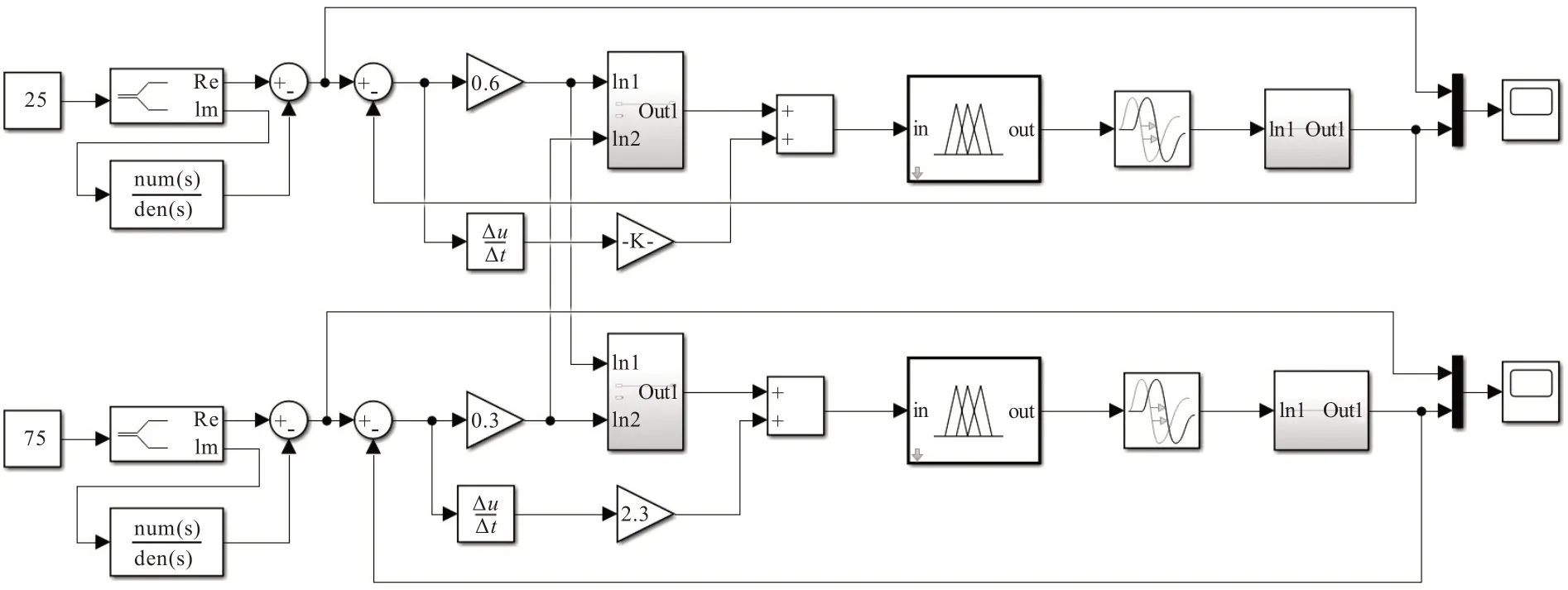
图4 模糊PID 控制器仿真框图Fig.4 Simulation block diagram of fuzzy PID controller
图5 为温度、湿度的传统PID 控制、模糊PID 控制和模糊PID 控制与解耦控制结合的响应曲线。设置起始温度为0 ℃,温度期望值为25 ℃,起始湿度为90%,湿度期望值为70%。通过Simulink 仿真后得到数据见表2,温度系统传统PID 控制在2 800 s 左右趋于稳定,超调量最大;模糊PID 控制在1 700 s 左右趋于稳定,超调量较小;模糊PID 控制与解耦控制结合在600 s 左右趋于稳定,超调量最小。湿度系统传统PID 控制在3 000 s 左右趋于稳定,超调量最大;模糊PID 控制在2 100 s 左右趋于稳定,超调量较小;而本策略在900 s 左右趋于稳定,超调量最小。对比分析得出,模糊PID 控制与解耦控制相结合相比于前两种控制方式,鲁棒性更好,并且提高了系统的动静态响应性能。
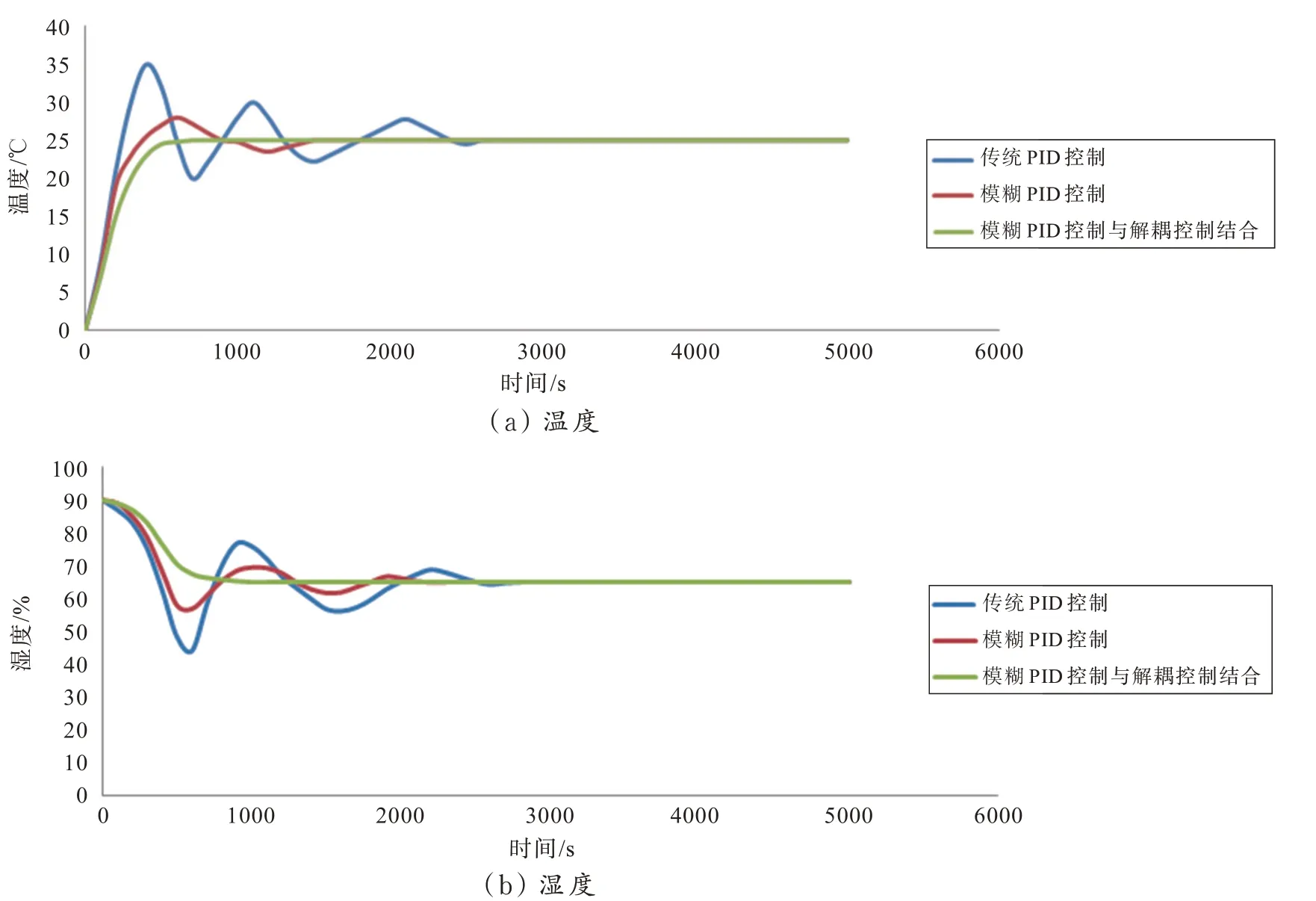
图5 传统PID 控制、模糊PID 控制和模糊PID 控制与解耦控制结合的响应曲线Fig.5 Response curves of traditional PID control,fuzzy PID control, and fuzzy PID and decoupling control
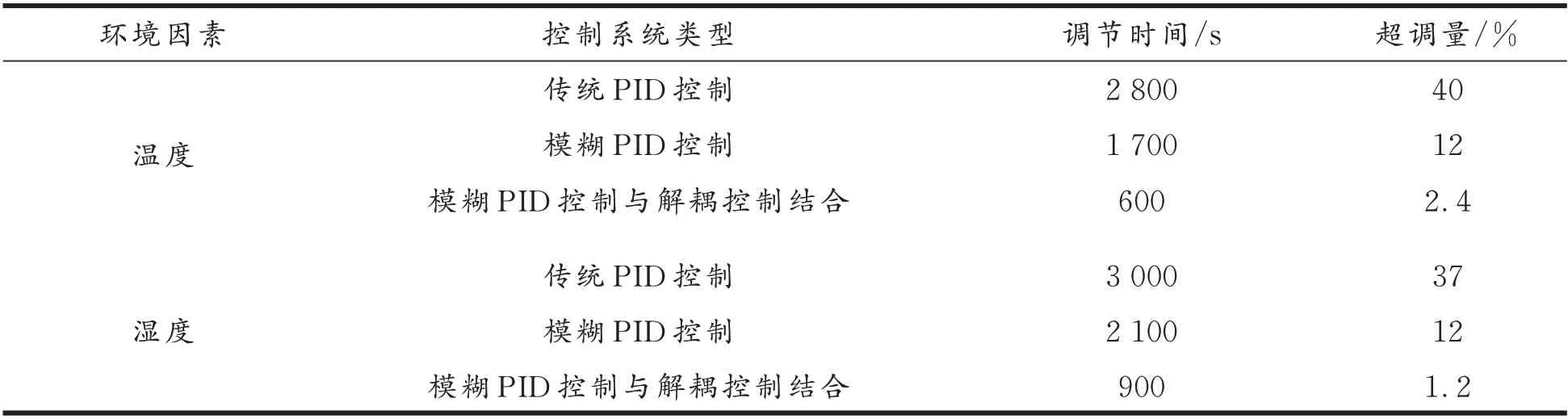
表2 传统PID 控制、模糊PID 控制和模糊PID 控制与解耦控制结合仿真曲线相关数据Tab.2 Simulation curve data of traditional PID control,fuzzy PID control,and fuzzy PID and decoupling control
4 草莓温室大棚系统设计
4.1 数据采集
在草莓温室大棚系统中,根据对草莓生长环境的研究,对数据进行采集分析得出草莓的最适生长环境见表3。
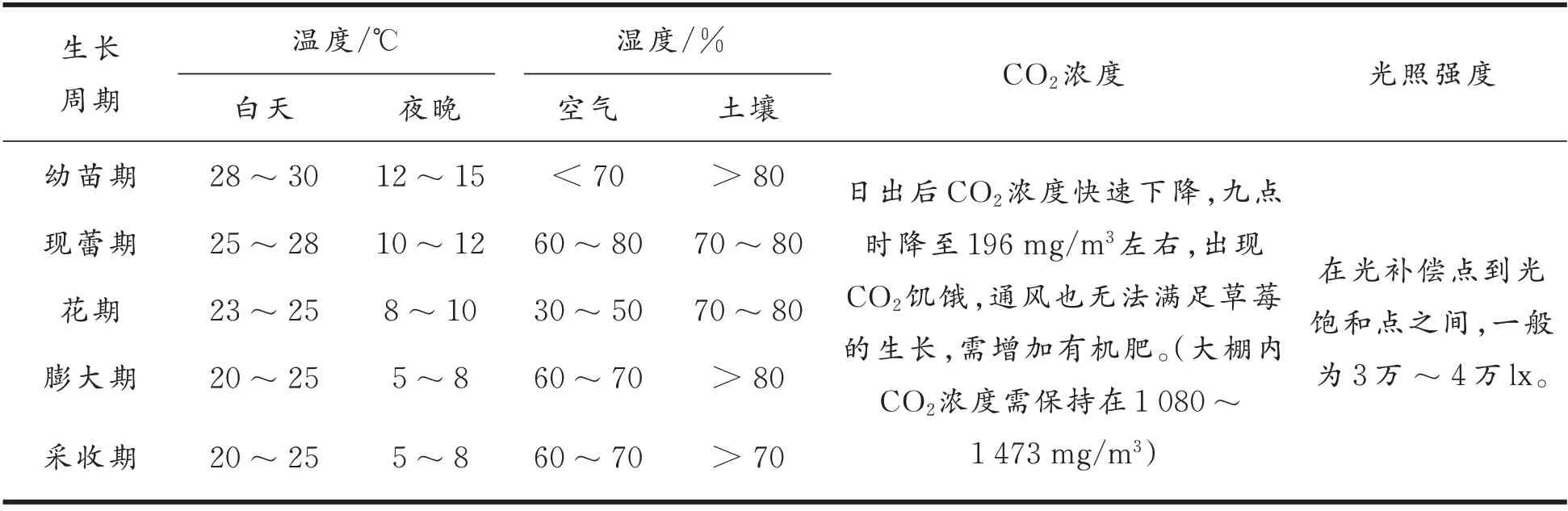
表3 草莓温室大棚数据采集表Tab.3 Strawberry greenhouse data acquisition table
4.2 中位值平均滤波法的优化
为了克服偶然因素引起的脉冲干扰、周期性的变化波动、灵敏度高低、各种采样值偏差、滤波控制效果和平滑度等,对传感器采集的数据进行预处理。针对各种传感器信号传输中的问题,存在限幅滤波法[14]、中位值滤波法[15-16]等。
对于农业大棚中的复杂系统,传感器个数有限,无法对温、湿度做到全面监测,单纯取平均又无法准确控制。本系统在中位值平均法的基础上采用自适应加权算法,根据大棚内不同位置所接收的温度不同(大棚环境从中间到大棚边缘环境参数非线性递减),当环境因素(如温度)的目标值趋于一致或局部最优时,使惯性权重增加,而各目标值比较分散时,将权重减小,对于目标函数优于平均目标值的微粒,对应权重因子较小,从而保护了该微粒,反之,使得该微粒向最优区域靠拢。对于提高全局和局部的准确性,采用非线性的动态权重系数公式,

式中,wmax、wmin分别表示w的最大值和最小值,f表示微粒当前的目标函数值,fmax、fmin、favg分别表示最大目标值、最小目标值和平均目标值。
对于采集的n个数据,若x2和xn-3为最大和最小值取出后,根据权重占比取平均后得

式中,x1~xn为n个温度数据,w为根据大棚中位置所占权重。
图6 为大棚内一天的气温变化图,与气温平均值相比,对气温数据使用中位值平均滤波加权法处理后,排除了偶然误差引起的干扰,例如在早上五点到七点之间,明显由于个别传感器的故障导致温度检测产生误差,而优化后的算法减小了误差;大棚边缘传感器更易受大棚外部温度影响,导致降温后温度变化较快,而大棚内部温度变化较慢,优化后数据相比于原始数据更加精确,提高了作物种植效率。
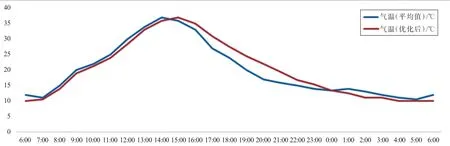
图6 棚内一天气温平均值和优化后的气温图Fig.6 The chart of daily average temperature and optimized temperature in the greenhouse
4.3 大棚控制系统设计
大棚内控制系统采用STM32F103ZET6 微控制器,软件设计以C 语言为基础。主控制系统和温湿度控制系统的流程图如图7 所示。定义控制系统3 个模式为待机模式、自动控制模式和远程控制模式。待机模式:控制系统不执行工作,各系统处于低电平待机状态;自动控制模式:控制系统以设定的阈值要求对大棚环境进行调控,无需人工操作;远程控制模式:根据作物的种类和不同的生长周期,人为操作系统发送控制指令切换生长模式,或手动控制执行机构执行一定动作。
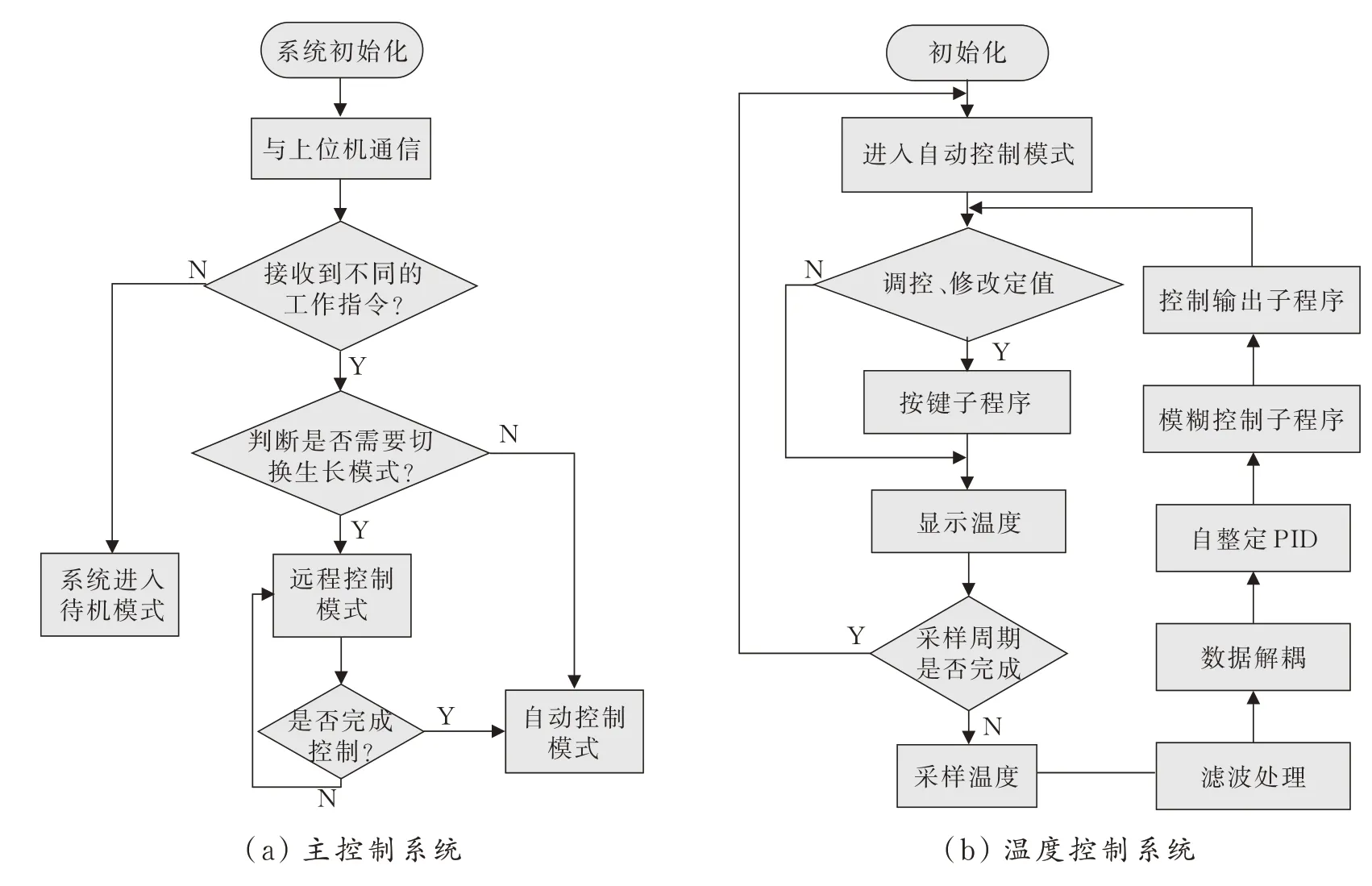
图7 主控制系统、温度控制系统软件设计流程图Fig.7 Flow charts of main control system and temperature control system
4.4 环境监测结果
在对农业玻璃温室大棚内部的监测和调控过程中,采用将中位值平均滤波法的优化算法、解耦控制算法和模糊PID 控制相结合,大棚内以温度为例的环境变化可以比较准确地控制在20 ~35 ℃(见图8),达到了本策略预期目标。

图8 以温度为例的环境监测界面Fig.8 Environmental monitoring interface taking temperature as an example
5 结语
目前,智慧农业大棚的控制技术主流仍为PID 控制,但传统PID 控制在控制速度、精度和抗干扰能力等方面有很大的局限性。而将中位值平均滤波法优化、解耦控制和模糊PID 控制相结合可以很大程度改善这种情况,提升控制效率和鲁棒性。仿真结果表明,这种控制系统可以更好地满足大棚对环境因素(温度、湿度、CO2浓度和光照强度)精确控制的需求。因此,解耦控制与模糊PID 控制结合的系统值得在农业大棚中推广的方案。
