基于无人机机载LiDAR与BIM技术在复杂地形公路设计中的应用
2021-12-30相诗尧姚守峰王奕彤
相诗尧,徐 润,姚守峰,张 涛,王奕彤
(山东省交通规划设计院集团有限公司 全寿命周期BIM技术应用研发中心,山东 济南 250031)
0 引 言
合理的设计方案是保证公路工程质量的重要因素。对复杂地形区域公路工程设计而言,既要求所依托基础地理信息数据的准确性,又要求设计方案与现场环境准确匹配。山地、丘陵等地势险峻区域,人工测量危险性较高,且测量难度大,同时由于植被茂盛,利用无人机正射航测或倾斜摄影方式又无法准确地获得地面高程,这对基础地理信息数据获取造成了困难;同时由于地形复杂,对设计方案提出了更高要求。
近年来,无人机机载LiDAR技术得到广泛应用[1-3],且BIM技术也迅速发展[4-7]。笔者针对高落差、植被茂密、地形复杂区域利用无人机搭载LiDAR变高航测方法获取地面高精点云数据,并通过BIM设计,验证了设计方案的合理性及与实际地形的匹配程度,以此达到提高设计质量目的。
1 无人机机载LiDAR与BIM技术
1.1 无人机机载LiDAR设备
机载LiDAR具有高精度、高分辨率、高自动化优势,已成为地表数据获取的重要手段。基于其多次回波反射特性,依托点云分类算法[8]能得到去除地表树木、房屋等附着物,表征真实地面高程的地面高精点云数据,以此可构建用于公路设计的数字高程模型(DEM)。同时,机载LiDAR采用动态后处理(PPK)模式,可做到免像控且不受基站与飞机之间通讯距离限制。
利用无人机搭载LiDAR可获取地面精密点云,并具有作业方便、灵活、受天气影响小、成本低等优势,较有人机搭载LiDAR的应用面更加广泛。在笔者研究中,选用无人机搭载LiDAR的方式实现点云数据获取。
通过对国内外无人机机载LiDAR产品调研,高端机载LiDAR产品激光部件多采用国外RIEGL系列激光扫描头,长射程激光扫描头由于重量大、价格昂贵而多用于车载端或有人机上,适合无人机搭载的激光扫描头型号为RIEGL mini VUX-1UAV,其有效射程为250 m。利用无人机搭载LiDAR对山地、丘陵等高差变化大区域进行地表空间数据获取时,若采用无人机平飞航测方式,受LiDAR测程限制,测区低海拔处易出现点云过稀或无点情况,影响最终成果精度,故无人机需具备变高飞行功能,能实现沿地表以固定相对高度飞行,以保证LiDAR的有效测程。
通过市场调研,笔者最终选择了飞马D200无人机及相应的激光模块(D-LiDAR200)。该无人机可沿地表变高飞行,LiDAR有效射程为250 m,能满足地形起伏变化较大区域的外业数据采集。
1.2 无人机机载LiDAR变高航测技术路线
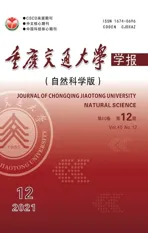
为实现对地形复杂、高落差、植被茂密区域的地面点云获取,笔者总结了复杂地形区域的无人机机载LiDAR变高航测技术路线,以实现地面高精度、高密度点云获取,主要包括外业航测、点云数据处理和地面点云提取3部分,如图1。
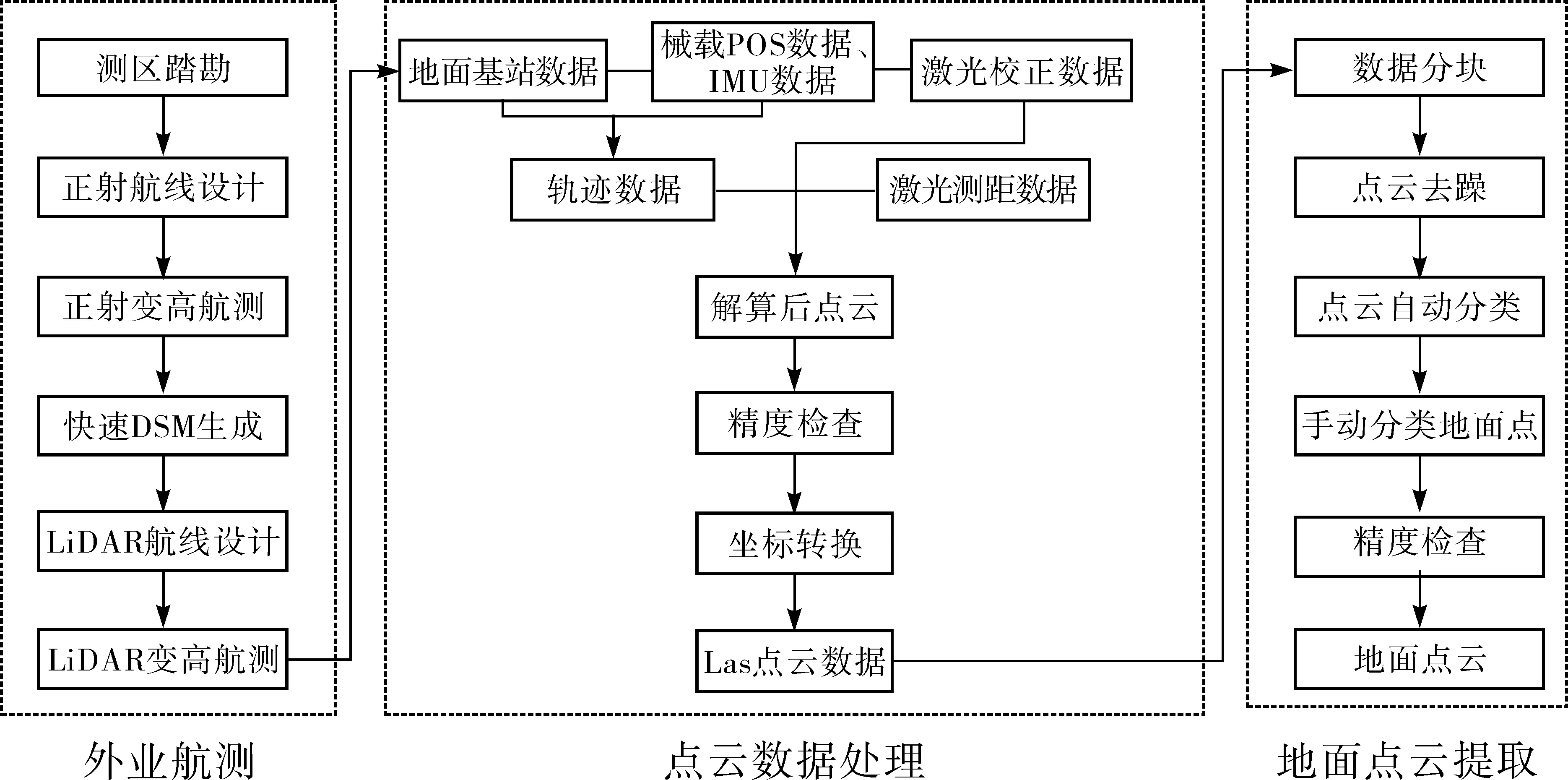
图1 复杂地形区域的无人机机载LiDAR变高航测技术路线Fig. 1 The technology route of UAV airborne LiDAR surveying by variable altitude in complex terrain areas
外业航测阶段,首先基于Google免费地形以较高安全飞行高度进行正射变高航测,通过空三解算、密集匹配等处理流程,获取测区的快速数字地表模型(DSM)成果,同时获取的正射航片经后期深化处理,可得到满足工程需求的数字正射影像(DOM)[9]。依托于该快速DSM成果,无人机搭载LiDAR与地表以固定相对高度飞行,实现变高航测,保证了航飞安全以及数据精度。在点云数据处理阶段,利用航测获取的地面基站静态数据、机载POS数据和IMU数据经紧耦合算法完成联合解算,获取轨迹数据,并结合LiDAR激光测距数据和激光校正数据,进一步解算出激光点云。对解算后的点云进行精度检查,当数据符合精度要求,则经过坐标转换,获得*.las格式的原始点云。由于公路设计依托于地面高程数据,因此在地面点云提取阶段,通过对Las点云依据相似特征分块并去噪后,利用自动分类和人工干预相结合的方式,获取滤除树木、建筑物、植草等影响因素的地面点云数据,并再次进行精度检查。
1.3 无人机机载LiDAR与BIM结合
对获取的地面点云和正射航片进行深化处理,可同时获取工程区域高精度的DEM和DOM成果,并共同构建得到三维地形模型,以此可作为公路BIM设计的基础数据资料。结合DOM可实现平面线形优化,利用DEM可深化纵断面、横断面设计及土石方精准计量等,并能替代部分横断面测量工作。通过无人机搭载LiDAR变高航测方式实现了设计所依托精准地形数据获取,且数据形式更加丰富,同时避免了人工现场实测危险,保证作业安全并显著提高作业效率。根据设计得到的BIM模型和三维地形模型精准套合结果,可直观地验证方案合理性及与现场环境的匹配程度,减少变更次数。
2 应用实例
2.1 项目概况
笔者以山东内某新建高速公路项目为例,根据工可路线方案,项目有部分路段位于山区,地势起伏较大,最大高差在250 m以上,现场有多处高压线(塔),山顶位置处有多台大型风力发电机,高度在100 m左右,区域内植被茂密,如图2。选取带宽500 m,里程7 km作为研究区域,将无人机机载LiDAR变高航测技术和BIM设计共同应用其中。

图2 现场环境Fig. 2 The field environment
2.2 无人机机载LiDAR变高航测
为获取机载LiDAR航测所依托的精确DSM数据,基于Google免费地形,以200 m的安全航高完成正射变高航测,并在项目现场采用配套的飞马无人机管家软件完成快速DSM处理,通过采用PPK模式,保证了快速DSM成果的数据精度,数据成果如图3。

图3 快速DSM成果Fig. 3 Rapid DSM results
依托快速DSM成果,无人机可进行更加精准的变高飞行,但是由于快速DSM无法准确构建现场的高压线(塔)和风力发电机等障碍物,为保证飞行安全,将机载LiDAR的航测高度设定为130 m,飞行速度设定为5 m/s,变高飞行航线如图4。通过外业航测,获得了地面基站静态数据、飞机端POS数据和IMU数据以及LiDAR激光测距数据。
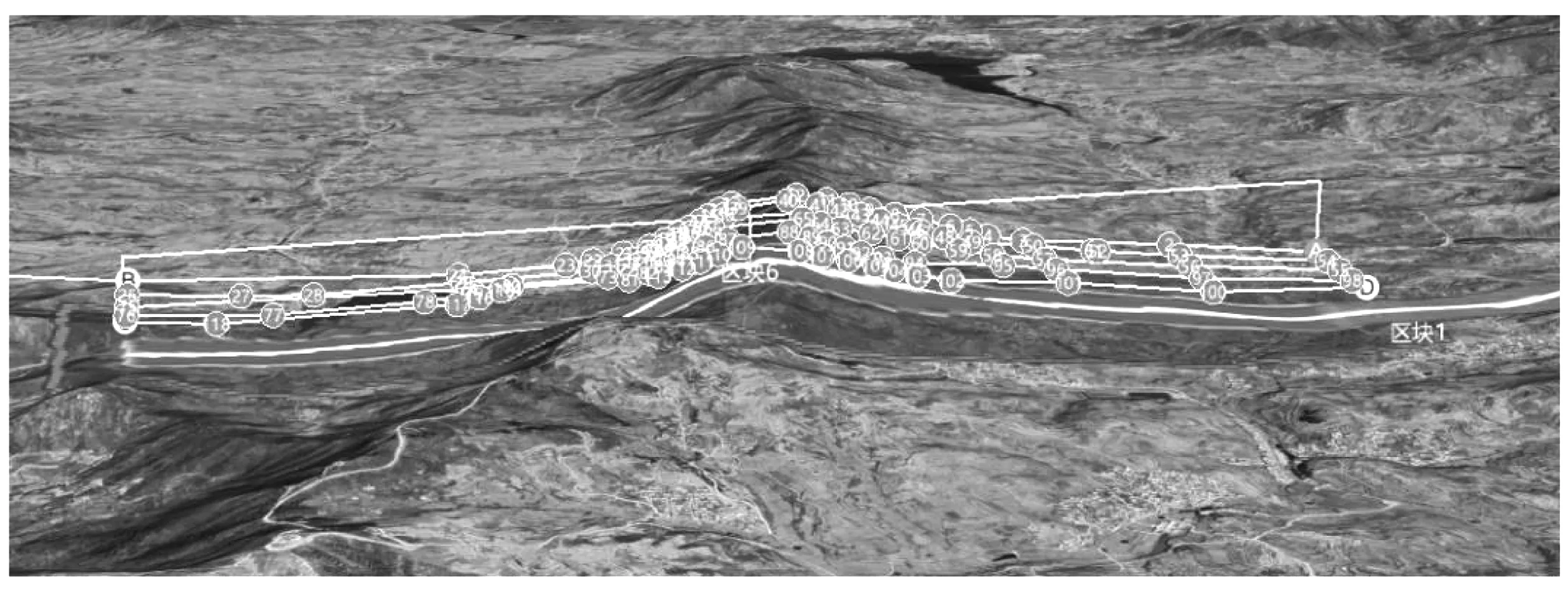
图4 机载LiDAR变高飞行航线Fig. 4 Variable altitude air routes of airborne LiDAR
2.3 地面点云获取
对原始数据进行处理,解算出的精密点云和轨迹数据如图5。其中:点云密度为35个/m3,无人机飞行时与风力发电机距离非常接近,从而验证了安全飞行高度的重要性。当保证安全而提升飞行高度会降低航测成果精度,而追求数据精度降低飞行高度,则会严重威胁飞行安全,故航测时要估算好飞行航高,同时也验证了精确DSM重要性。

图5 精密点云和轨迹数据Fig. 5 Precise point cloud and trajectory data
利用实时载波相位差分测量系统(RTK)均匀采集的74个检查点进行数据精度检查,检查点采集所用位置服务端口与机载LiDAR航测基站所用端口一致,经计算得出原始点云高程中误差为0.070 m。由于点云数据未进行分类,当利用草丛或矮树下方检查点进行精度检验时,会将非地面点加入计算过程中,影响数据检查精度。
为得到满足工程应用所需的点云成果,通过覆盖工程区域范围的高精度控制点计算出坐标转换所需的7个参数,经布尔莎7参数模型[10]完成点云数据坐标转换,获得*.las格式点云数据。为实现较好的点云分类效果,根据地表情况,将相似地形地貌的区域划分到同一区块中,针对每一分块点云数据,经点云去噪、自动分类和人工分类,获取公路工程设计所需的地面点云,分类前后效果如图6。

图6 点云分类效果Fig. 6 The effect of point cloud classification
为保证点云数据应用时的流畅性并保留对地形特征表达的准确性,以30 cm点距对地面点云抽稀[11],并再次利用RTK实测的地面点对处理后的地面点云进行精度验证,精度验证情况如表1。
表1 点云精度验证Table 1 Point cloud accuracy verification m
经计算,获得地面点云高程误差为0.060 m。这表明分类后的地面点云可减少植被、房屋等地物的影响,提高数据精度。
2.4 机载点云与BIM设计的结合
利用获取的地面点云数据,生成精确的DEM,协同航测照片构建的DOM,共同构成了该区域的三维地形模型。依托该三维基础数据,可使设计人员更全面地掌握现场情况,在桥墩布设、隧道洞口位置及形式选择、土石方计算等方面更加精准。基于三维地形模型,利用Revit BIM设计软件完成三维BIM设计,可更加形象地展现设计意图,并易于验证设计方案的合理性,BIM模型与三维地形模型的结合效果如图7。
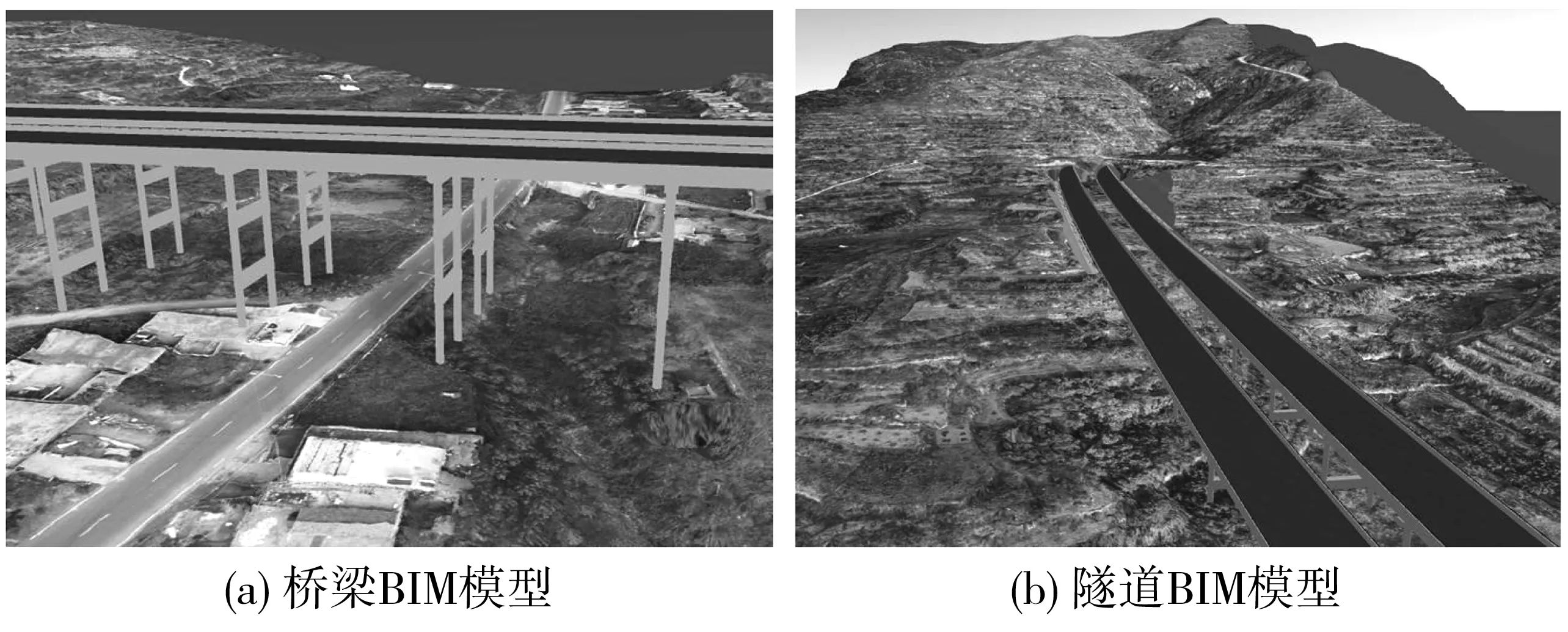
图7 BIM模型与三维地形模型的结合效果Fig. 7 The effect of combining BIM model with three-dimensionterrain model
3 结 语
笔者利用无人机搭载LiDAR通过变高航测对高差大、植被茂密等地形复杂区域进行基础地理信息数据采集,能获取用于公路工程设计所需的高精度地面点云,并结合三维BIM设计技术,进一步验证设计方案的合理性以及与现场环境的匹配程度,有助于提高复杂地形区域的公路勘测设计质量。