浓雾区路段安全预警系统对驾驶行为影响研究
2021-12-30李海舰赵晓华刘莲莲
常 鑫,李海舰,荣 建,赵晓华,刘莲莲
(1. 中国民航大学 交通科学与工程学院,天津 300300; 2. 北京工业大学 城市建设学部,北京 100124)
0 引 言
雾是由大量近地面空气中的水汽受冷凝结形成的,雾区会降低驾驶员的可视距离,大雾造成的视距下降是雾天交通运行效率降低和交通事故诱发的主要因素[1-2]。交通事故统计年报数据表明,不良天气条件(雨、雾、雪、大风等)下发生的事故数占总数的10%左右,其中雾环境下发生的事故数排在第2位,因大雾影响造成的高速公路事故严重程度最大[2],因此,解决雾区道路交通安全问题十分必要。能见度下降对驾驶行为(跟驰、换道、控速)产生的重要影响,是研究设计雾区交通管理和安全预警策略的重要依据[3-4],驾驶员在雾区路段行驶,为降低事故风险而减小速度是最典型的控速行为[5]。
尽管驾驶员在进入低能见度的雾区条件下都会采取控速行为,但是研究表明这种控速行为的停车视距是不足的,特别是在遇到危险情况(前车突然减速或前方发生事故等)时[6-7],如能提前获得前方道路能见度信息,并及时把预警信息传递给下游车辆,可为驾驶员进入雾区前的速度调整提供充足时间。驾驶模拟技术是一种安全、经济、高效的实验研究手段,且研究变量容易控制,可以根据研究目的设计不同因素水平的驾驶模拟环境,进而展开面向人因的驾驶行为特性研究[8-10]。近年来部分学者借助驾驶模拟技术,开始研究雾区预警系统对雾区道路交通安全的影响。L.M.TRICK等[11]利用驾驶模拟环境,获得了不同年龄段驾驶员雾区内的速度数据,表明老年驾驶员在雾区基本都大大降低了速度,而年轻驾驶员却很少降低速度,驾驶风险较高;Y.WU等[12]利用驾驶模拟器,评估了基于车车通信技术的抬头显示预警系统和语音播报预警系统,对雾区驾驶反应特性的影响,表明车车通信的雾区预警系统,可以减少驾驶员的反应时间和降低追尾事故的概率。尽管以往的研究已经开始关注不同的雾区预警系统对驾驶员速度调控的影响,但大部分的研究往往只关注某些特定的驾驶场景(单一预警系统)和雾区内的驾驶行为影响,对于不同类型预警系统共同作用下,对驾驶行为影响和交通安全的系统分析仍比较缺乏。笔者的主要研究目标为:利用驾驶模拟技术分析不同安全预警系统,对高速公路浓雾区控速行为和交通安全的影响研究。
1 实验设计
1.1 实验场景
实验选取双向4车道的高速公路作为驾驶模拟仿真道路,实验道路长度为5 km,实验基本路径如图1。图1中:A~B:0.5 km的实验起始路段(双向4车道,限速80 km/h);B~C:1.0 km的实验过度路段(双向2车道,限速40 km/h);C~I:5.5 km双向4车道高速公路(正式实验段),其中浓雾区G~H路段区间限速60 km/h,其他路段限速120 km/h。为研究不同的雾区预警系统对驾驶员在进入雾区的过程中驾驶行为的影响,研究选取3 km作为数据分析路段,并将路段分为无雾区E1~F(1 km)、雾区渐变段F~G(0.5 km)以及浓雾区路段G~H(1 km)3个区间。实验设计4种驾驶环境:无预警、车载设备(on board unit,OBU)预警、动态信息标志(dynamic message sign, DMS)预警以及OBU和DMS共同提供预警信息。实验场景中道路设施形式相同,交通流状态相同,实验中OBU预警车载端使用平板提供信息。

图1 实验基本路径示意Fig. 1 Schematic diagram of basic experimental path
实验中,车载设备从D点开始预警前方浓雾区位置和限速,至浓雾区前每隔500 m预警一次,并更新雾区位置预警信息。整个实验过程中,车载设备具备超速预警功能,OBU预警系统采用语音播报、预警信息文字显示和预警标志相结合的方法,其中,超速预警界面显示示意如图2(a)。OBU可以感知前方车辆速度及间距信息,并依据安全间距计算方法,当速度大于保持最小安全间距所要求的速度时,OBU会发出“滴滴滴”的预警提示。在有DMS的场景中,DMS设置在E1和E2位置,并显示浓雾区位置预警,实验过程中的场景如图2(b);为避免其他因素的干扰,空白对照组中,DMS显示信息为“兴延高速欢迎您”的字样。

图2 不同预警系统显示Fig. 2 Display of different early warning systems
根据GB/T 27964—2011《雾的预报等级》中对浓雾能见度的定义,实验设计的浓雾区能见度为300 m。参考文献[3]对驾驶模拟场景中雾区能见度的标定方法,对300 m能见度标定:
1)选取7名视力或矫正视力正常的试验驾驶员参与雾区能见度标定。
2)在一条直线段高速公路模拟场景中,距离试验驾驶员300 m处停放一辆红色小客车。
3)使用模拟器setflag函数,调整雾区能见度参数,使实验驾驶员刚好能看到红色车辆轮廓。
4)记下每一次雾区能见度参数值,取7位试验驾驶员所调整参数的平均值,作为模拟浓雾场景中300 m能见度的设置参数。
1.2 实验方案
根据中心极限定理,如果随机变量服从正态分布,那么随机抽取的样本也服从正态分布;样本量大于30个,即能代表整体的样本特性。据此,选取35位驾驶员(23名男性和12名女性)进行实验,35位驾驶员符合我国驾驶员个体特征(性别、年龄等)分布。
实验过程共4种驾驶环境,为避免驾驶人因熟悉驾驶路线而影响试验结果,每个场景驾驶员驾驶1次;实验分2次进行(间隔1 d)。实验内容为:
1)实验前基本信息填写。填写包括:基本信息(姓名、性别、年龄和驾驶经验)和实验前生心理状况(睡眠、饮食以及疲劳状态自评等)。
2)驾驶前培训。工作人员为试驾驶员进行车载设备产品说明,同时告知驾驶员相关注意事项,如行驶道路等级,及试验过程中出现事故后的处理办法等。
3)预驾驶。驾驶员在模拟器的非实验场景中驾驶5 min,以适应模拟车辆操作和模拟驾驶环境。
4)正式实验。告知试驾驶员每次的行驶目的地,然后开始实验,模拟仓系统开始采集数据,工作人员记录试验过程。不同场景实验之间,驾驶员休息15 min,已尽量避免实验场景之间的相互影响。
5)模拟驾驶结束。试验结束后,被试驾驶员填写驾驶反馈问卷。
2 控速行为效果评价
2.1 控速行为影响的多元回归分析
为了更好描述不同的雾区预警系统,在驾驶员进入雾区过程中对减速操作行为的影响,分别对不同区域进行数据分析。利用SPSS软件对统计数据进行K-S检验,结果表明数据服从正态分布。然后对数据(每500 m为一组)的统计特征进行描述,结果如图3。结果表明:驾驶员进入浓雾区前会选择减速,以保证交通安全;当驾驶员使用预警系统时,驾驶员采取减速行为比没有预警系统提醒时提前。从实验结果中发现:驾驶员在使用车载预警系统时,驾驶员在浓雾区平均运行速度较高,但在限速值以下。

图3 平均运行速度Fig. 3 Average running speed
每位驾驶员随机进行4个场景的实验,模拟驾驶时间在30 min左右,模拟仓数据采集频率为20 Hz。对35位驾驶员每一个场景的3个区域的相同观测指标(速度、加速度等)进行统计,但统计数据存在聚集性问题,不能根据数据统计结果直接分析不同预警系统对驾驶行为的影响效果。线性混合随机效应模型考虑到数据的聚集性问题[13],能够对数据结果的变异进一步分析,从而获得各项因素对驾驶行为结果的影响估计和假设检验结果,模型形式如式(1):
yijm=αj+βjXijm+βjXi+μi+ξijm
(1)
式中:yijm为驾驶员平均速度;i为驾驶员编号(1,2,3,…,35);j为路段区域编号(1,2,3);m为实验场景编号(1,2,3,4);βj为固定效应矩阵,表示区域j的相关系数;Xijm为不同雾区预警系统;Xi为驾驶员个体特征;αj为不同路段区域下模型截距;μi为不同个体截距的变异;ξijm为随机误差项(残差)。
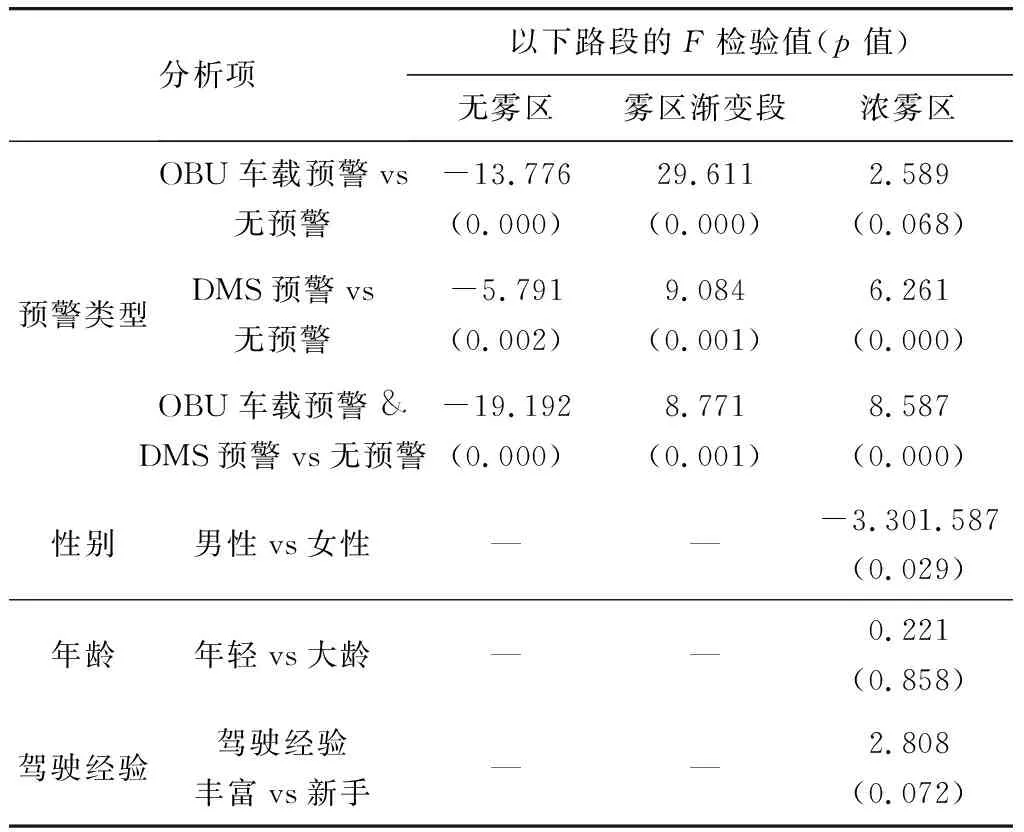
表1 平均运行速度影响因素显著性分析Table 1 Significance analysis of influencing factors of averagerunning speed
2.2 控速行为评估指标结果分析
道路出现团雾会影响驾驶员视距,驾驶员为保证在雾区行车有足够的反应时间,在进入雾区前通常选择降低速度。驾驶员速度调控行为与驾驶员对预警系统提供的信息感知水平有关,文献[14]用驾驶员在无雾区路段的终点速度(vend)作为反映驾驶员进入雾区前的准备情况,采用进入雾区后的速度与无雾区速度的变化率(Predu)来评估速度调控能力变化,Predu的计算如式(2):
(2)
式中:vclear为无雾区域的平均运行速度,被试驾驶员在E2—F区间段的运行速度的均值;vfog为浓雾区域平均运行速度。
雾区渐变段的最大减速度通常用来考量驾驶员在遇到危险境遇前的刹车行为的安全性,减速度越大,刹车行为越危险[18]。另外,笔者选取浓雾区起始位置平均速度vstart、雾区结束时平均速度vend、进入雾区前平均最大减速度amin、驾驶员在雾区对限速的服从比例(即驾驶员运行速度在限速60 km/h以下的比例,Pvfog<60),来评估不同预警系统对车辆由无雾区进入浓雾区后的运行稳定性影响。
控速行为评估指标计算结果如表2。结果表明配备有雾区预警系统场景的vend和vstart明显比没有预警系统的要小。具备雾区预警系统时,驾驶员雾区限速服从度明显提升,这表明雾区预警系统提供的预警信息能优化驾驶员控速行为,提升雾区驾驶行为稳定性。且由图3可知,在预警系统中,仅配备OBU预警系统的驾驶员服从度较高,在限速水平下均速也最大,运行效率整体最优。

表2 控速行为评估指标Table 2 Evaluation indexes of speed control behavior
3 安全评估
3.1 安全指标选取
交通事故致因一般比较复杂,与人的因素、车辆性能和天气状况等有关。参考文献[15]、文献[16]的研究成果,选取速度标准差,以及评估交通流前后车辆追尾碰撞事故隐患指标TET和TIT作为评价道路交通纵向安全性指标。对于安全性指标,TET表示驾驶员处在危险状况下(即TTCbrake (3) (4) (5) 0 (6) (7) 式中:Δt=0.05 s;t为数据采集频率;n为驾驶员编号;N为驾驶员总数;δt为判断变量,TTC*为TTC阈值;xn(t)-xn-1(t)为实验车与前车间距;Ln-1为车辆长度;vn(t)为跟驰车辆速度。 在实验过程中,驾驶模拟器动态采集实验车辆的行驶速度、加速度,同一车道前方250 m范围内的前车运行速度数据,以及前后车间距。模拟场景每次实验场景交通流参数相同。实验车外的其他车辆速度为匀速行驶,分布在C—I路段部分,在浓雾区G—H的速度为55 km/h,雾区渐变段部分的车辆设置为70 km/h,其他路段车辆速度设置为90 km/h。实验过程中,驾驶员随机跟驰前方车辆,当跟车间距小于250 m后,模拟器开始动态采集前车运动信息和前后车间距,由此可以计算式(3),根据文献[18]、文献[19]的研究,TTC*范围为1~3 s。 速度标准差、TET和TIT被用来评估不同预警系统对交通流纵向安全性的影响,研究选择TTC*=2 s作为基本分析案例。表3为3种不同场景(OBU预警& DMS预警数据不足,未进行分析)下的安全性指标计算结果。配置有OBU预警系统时,TET和TIT最小,尽管DMS仅设置在无雾区,但是预警信息能够帮助驾驶员进入雾区前优化控速行为,使得驾驶员能够在雾区保持更加稳定的速度。因此,该场景下雾区纵向安全性比没有预警系统时较高。 表3 交通安全指标计算结果Table 3 Calculation results of traffic safety indexes 不同TTC阈值条件(TTC*=1.0、1.5、2.0、2.5、3.0 s)下的TET和TIT灵敏度分析如图4。结果表明不同阈值条件下,浓雾区TET和TIT值一致变大,说明浓雾区驾驶安全性较低。另外,不同预警方式下的纵向安全性比较评估结果相同,从侧面验证了雾区预警系统能够有效改进驾驶安全性,且OBU预警系统对交通安全性提高更加显著。 图4 不同TTC阈值灵敏度分析Fig. 4 Sensitivity analysis of different TTC threshold values 通过多因素水平分析和线性混合模型建模,分析多变量对驾驶行为的显著性影响;通过计算控速行为和纵向安全性指标,评估不同雾区预警系统对高速公路雾区路段控速行为及交通安全性的影响。获得以下结论: 1)驾驶员进入浓雾区前会选择减速,配备有预警系统时,驾驶员出现显著减速行为提前;另外,个体社会属性(性别、年龄、驾驶经验)对高速公路雾区驾驶员平均运行速度没有显著性影响,而不同的雾区预警系统对驾驶员平均运行速度有显著性影响。 2)安全预警系统提供的交通信息能够优化驾驶员进入高速公路浓雾区前的控速行为,进而提升雾区运行速度的稳定性。配备OBU预警系统场景的驾驶员不仅限速服从度较高,且平均运行速度在限速水平下。 3)安全预警系统提供的雾区预警信息能够显著增强交通安全性,对于研究提出的OBU预警系统对驾驶安全性的提升更加明显。

3.2 安全效果评价


4 结 语