三泵控直驱液压系统动态特性及复合控制方法*
2021-12-29刘喜涛张树忠张雪峰
刘喜涛,张树忠,张 兰,张雪峰
(福建工程学院机械与汽车工程学院,福州 350108)
0 引言
电液控制系统一般分为阀控系统和泵控系统两类。阀控系统通过电液比例换向阀改变液压油流向和流速,具有响应速度快、控制精度高的特点,但存在节流损失大、系统效率低等问题。泵控系统通过控制液压泵的排量或转速,驱动液压执行器,避免了节流损失,提高了能量利用率[1]。
依据执行器的不同,泵控系统可分为泵控对称执行器(对称液压缸/液压马达)和泵控非对称执行器(非对称缸)两种。其中泵控非对称缸(液压缸)系统中存在非对称液压缸面积差造成不对称流量的问题。为解决该问题,可采用液压变压器和同轴驱动的两个变排量泵两种方案来补偿不对称流量[2];利用液控单向阀补偿不对称流量[3];开发一种新型三口非对称配流泵来平衡不对称流量[4];以及采用单电动机同轴驱动多定量泵的方式补偿不对称流量[5]。
在单电动机同轴驱动双定量泵(双泵控系统)的闭式系统运行中,无法控制液压缸低压侧的压力最低值,降低了系统动态稳定性[6]。为此,提出了一种单电动机驱动三定量泵控非对称缸的闭式系统(三泵控系统)方案及速度/位置复合控制方法,该液压系统通过同轴驱动三个定量泵使流入液压缸流量始终大于所需流量,提高液压缸低压侧最低压力增强系统稳定性。
1 系统结构和运行原理
1.1 变转速双泵控非对称缸系统
变转速双泵控非对称缸系统主要包括非对称液压缸、溢流阀、二位二通比例阀、伺服电动机/发电机和两个双向定量泵/马达以及为防止气穴的单向阀组[7]等,两台定量泵与伺服电机同轴连接,两泵出口分别与非对称缸两侧相连。泵的进出口方向相反,当给定旋转方向时,其中一个定量泵将液压油输送到非对称缸一侧腔室,而另一个定量泵将液压油从另一侧腔室中排出。二位二通比例阀限制通过伺服控制器控制液压缸低压侧压力最低值。液压缸伸出与缩回速度表达式为:
(1)
式中,vi为液压缸速度;Vp,i为定量泵排量;n为定量泵转速;Ai为液压缸有效面积;i为液压缸A、B腔。
当VpA/VpB=AA/AB时非对称缸活塞可以保持匀速运动。在此引入一个匹配率γ概念,即:
(2)
式中,Qin、Qout为液压缸输入、输出流量;x为液压缸活塞杆位移。
双泵控非对称缸系统在理想状况下(忽略液压泄漏),当γ=1时,两个定量泵所提供流量完全匹配非对称缸流入和流出两侧所需流量;当γ>1时,非对称液压缸流入流量大于所需流量,流入一侧压力增大;当γ<1时,刚好相反流入一侧压力减小。
在液压系统中存在泄漏等问题,这些问题使液压系统无法保持在γ=1的状态运行。当伺服电机反转时,液压缸流入流量小于所需流量(即γ<1),液压缸低压侧压力降低,无法保证液压缸低压侧压力的下限值。随着压力的变化会使液压油的弹性模量变化,这将导致系统的固有频率变化,并可能进一步对系统的阻尼比产生显著影响,即压力变化会对系统的动态特性产生不利影响。因此,通过提高液压缸低压侧最低压力可以提高液压系统稳定性。
1.2 变转速三泵控非对称缸系统
为解决变转速双泵控非对称缸系统稳定性差的问题,提出了一种变转速三泵控直驱液压闭式系统[7],如图1所示。
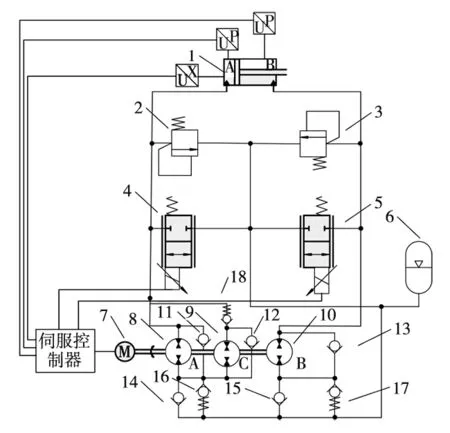
1.非对称液压缸 2、3.溢流阀 4、5.二位二通阀 6.蓄能器 7.伺服电动机 8、9、10.定量泵 11、12、13、16、17、18.单向阀 14、15.止回阀
此系统相对于变转速双泵控非对称缸系统增加了一个定量泵(泵C),该泵安装在伺服驱动轴与泵A一侧,三泵工作状态如表1所示。

表1 三泵控差动缸定量泵工作状态
附加泵C的作用是无论伺服电机的转动方向,都有过量的流量流入非对称缸(即γ>1),提高液压缸低压侧最低压力,确保油液具有足够高的弹性模量,以提高系统的稳定性。系统结构框图如图2所示。
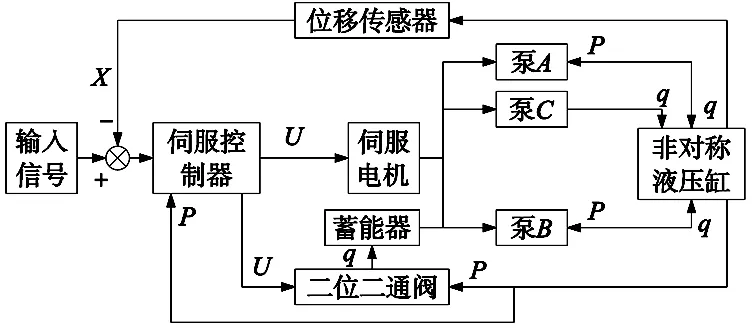
图2 三泵控液压系统结构框图
2 液压系统建模
该液压系统主要包括:油液、液压缸、管道、单向阀、定量泵、蓄能器,在MATLAB/Simulink中建立液压系统仿真模型并开展动态仿真分析[8]。
2.1 油液弹性模量
(3)
式中,El为初始油液弹性模量;pa为大气压力;N为气体多变指数;α为大气压力下油液中的气体相对含量。
2.2 液压缸模型
非对称缸两侧的压力连续性方程为:
(4)
(5)
式中,EA(p)、EB(p)为液压缸A、B腔液压油的弹性模量;VOA、VOB为液压缸A、B腔死区容积;AA、AB为液压缸A、B腔工作面积;qA、qB为液压缸A、B腔流量;x为液压缸行程。xmax为液压缸最大行程。
液压缸静态摩擦力模型:
(6)
式中,vs为满足静摩擦的最大速度;FS为静摩擦力;FC为库仑摩擦力;b为粘滞摩擦系数;
2.3 管道模型
(7)
式中,qi、qo为管道进出口流量;Vpipe为管道容积。
2.4 单向阀模型
(8)
式中,CD为流量系数;A为开口横截面积;ρ为流体密度;pcr为开启压力。
2.5 定量泵模型
对于定量泵,其动态特性主要取决于泵的內外泄漏和液压油腔油液的可压缩性,泵的输出流量为:
qp=Vpn-qlp
(9)
qlp=Clppp/μ1
(10)
式中,qlp为泵的泄漏量;Clp为泄漏系数;μ1为油液动力黏度。
2.6 蓄能器模型
液压蓄能器的理想热力学方程为:
(11)
式中,p0Acc为液压蓄能器在初始状态下的压力;V0Acc为液压蓄能器在初始状态下的工作容积;pAcc为蓄能器工作状态下的压力;VAcc为蓄能器工作状态下的容积。
3 带有MPC补偿的复合控制方法
采用位置闭环控制无法对速度进行控制,速度的变化对系统稳定性造成很大影响且会存在超调等问题[9]。而采用速度闭环控制,降低了活塞杆的位置控制精度[10]。在模型预测控制(MPC)中可以预测系统未来动态,滚动优化补偿量能够避免超调并快速到达目标位置[9]。因此结合速度控制和位置控制的优点,提出了一种带有MPC预测补偿的速度/位置复合控制方法。即活塞杆开始运动时采用PID速度控制,在接近目标位置后采用带有MPC预测补偿的PID位置控制。MPC预测补偿控制原理如图3所示。
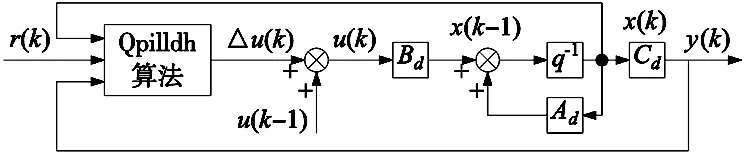
图3 MPC预测控制原理图
简化该预测控制原理中的多项约束,修正后的预测模型原理如图4所示。
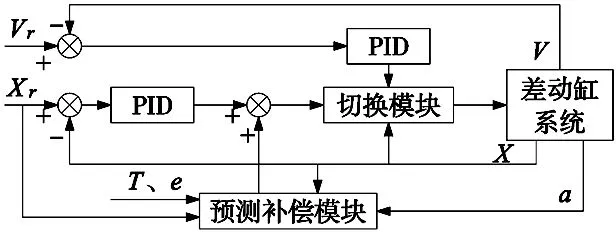
图4 修正后预测模型原理图
图中,T为设定取样周期、X为实际位移、X(k+1)、X(k)、X(k-1)是对应时间T周期内的位移、Xr为设定目标位移,e为限定是否采用预估算法误差,通过切换模块中设定的切换点对位置/速度控制进行切换。
具体预测补偿模块如图5所示,其中预测算法为与MPC原理相近,即将第k时刻的实际位移与预测模型输出的位移与误差附加到k+1时刻的预测输出上,可表示为:
X(k+1)=(2a(k)-a(k-1))T2/2+
3a(k)/2-a(k-1)T+X(k)
(12)
通过预测下一个周期T内位移对PID位置控制进行补偿,补偿量与位置误差成正相关。
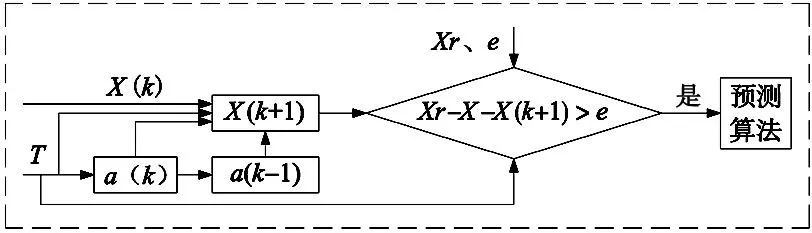
图5 预测补偿模块
4 双泵与三泵液压系统仿真分析
根据非对称缸的速度及负载方向,可以将液压系统运行分为4种工况,如图6所示。为对比两种泵控系统的稳定性,对4种工况进行对比分析。
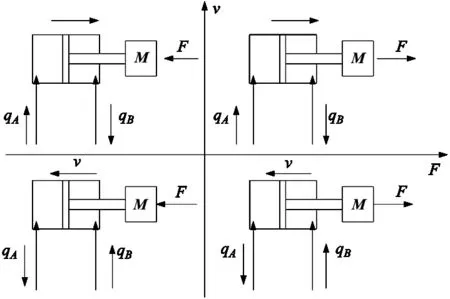
图6 非对称缸四象限工况图
输入速度信号及负载输入如图7所示,质量块M为200 kg,电机最高转速为3000 r/min,二位二通阀来控制液压缸低压侧压力的最大值,仿真模型部分参数如表2所示,其中双泵系统中泵A、B的排量为15.14 cm3/r、9.94 cm3/r,三泵系统中的泵A、B、C的排量分别为12 cm3/r、3.14 cm3/r、9.94 cm3/r。为进行全面分析,在相同的PID速度控制下对两个液压系统进行无负载力(F=0)运行,依据工作4工况可分为5个阶段如图7所示。
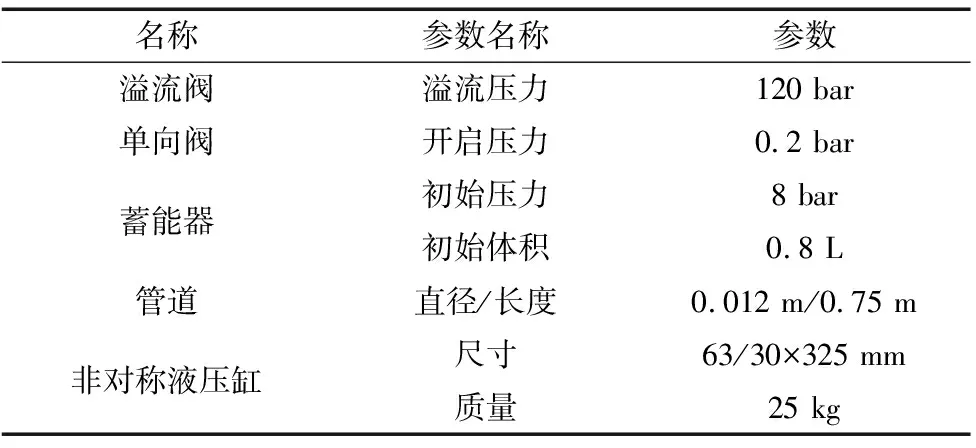
表2 仿真模型参数
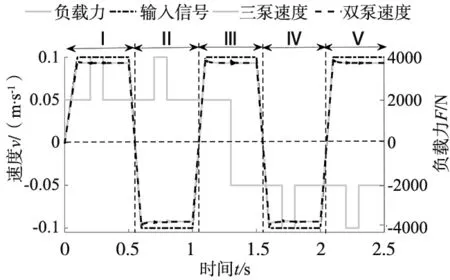
图7 变负载力下的速度曲线
图7展示了变负载力曲线和加入该负载力后速度曲线。添加变负载力后,液压系统具有如图6所示的4种工况。为更加客观分析出在变负载力下两系统速度变化情况,对系统速度与输入速度信号作差,得到如图8所示曲线。
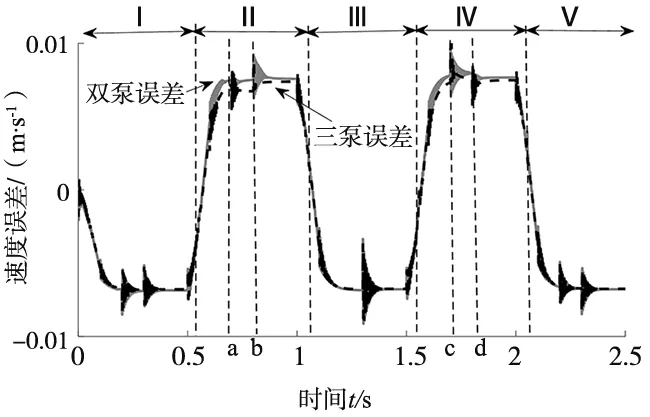
图8 变负载力下的速度误差曲线
在图8中,第I、III、V阶段在负载力的作用下两系统变化相同,第II、IV阶段4个点中速度误差变化如表3进行对比。在整个四工况运行中三泵控系统较双泵控系统稳定时间缩短34.7%。

表3 系统稳定时间对比
在相同PID位置控制及无负载力的条件下对两系统进行仿真,其中图9为输入位置信号与两系统液压缸位移信号,图10为系统位移与输入信号位移差值,图11为两系统的液压缸压力曲线。
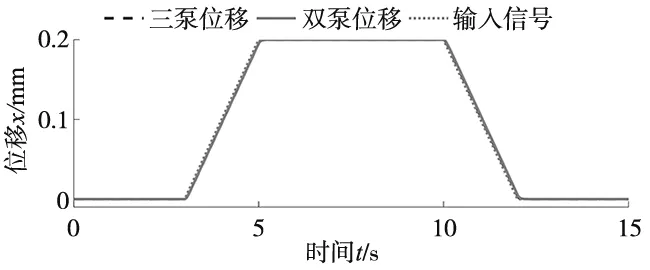
图9 参考位移和两系统输出位移曲线
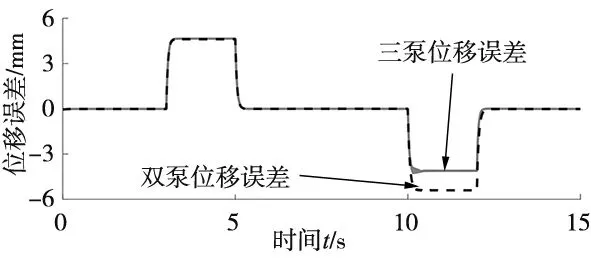
图10 位置控制下两系统位移误差曲线
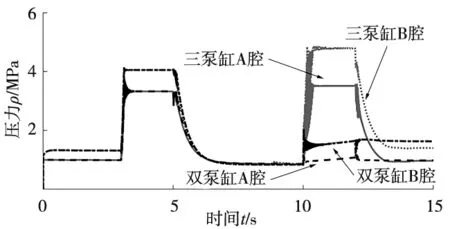
图11 位置控制下两系统非对称压力曲线
通过图10、11可以看出,液压缸处于较高压力下会减小23.9%的位置误差。
5 带有MPC补偿的复合控制系统仿真分析
在复合控制系统仿真分析中,为了和PID位置控制进行对比,两系统中位置PID参数相同。设定位移为0.2 m,在速度PID控制中,速度设定为0.15 m/s。其中对两种控制方法及输入信号进行对比如图12所示,对两系统速度变化进行对比如图13所示。
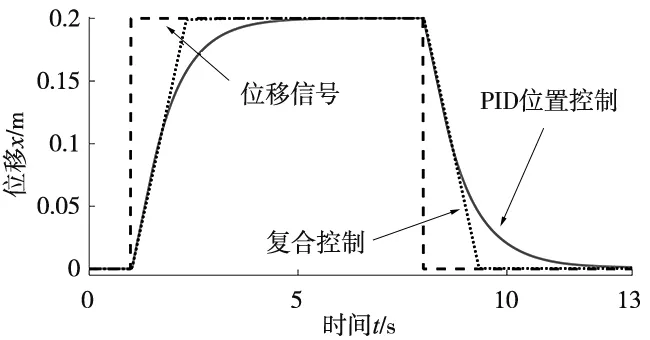
图12 参考信号及两控制系统位移曲线
由图12参考信号及两控制系统位移曲线可以看出,复合控制方法与位置控制相比,更快接近目标位置并进行调整,到达目标时间较PID位置控制缩短47.7%。由仿真结果可知,带有MPC预测位置控制可以始终满足X≤Xr减少超调量。
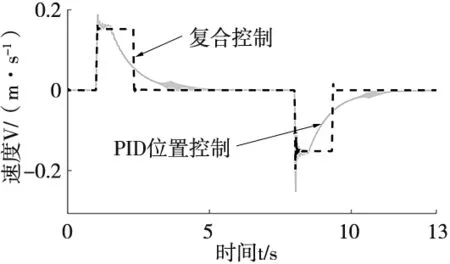
图13 两控制系统速度曲线
图13两控制系统速度曲线可以看出,在运行过程中PID位置控制的速度一直处于变化中,复合控制的速度稳定并且可调。
6 结论
(1)在PID速度控制的四象限工况下,三泵控系统的稳定性强于双泵控系统,稳定时间缩短了34.7%,在系统PID位置控制中,三泵控系统较双泵控系统位置误差降低23.9%。可得在三泵控非对称缸闭式系统中,通过增加泵C提高液压缸低压侧最低压力,增强系统稳定性。
(2)带有MPC位置预测补偿的速度/位置复合控制系统与PID位置控制相比,不仅能提高系统稳定性,加快系统响应速度,还能减少位置控制超调量。
