基于特征光线选择的多光场相机采样优化方法
2021-12-28齐琪王长健仪建华黄益智李金键张彪许传龙
齐琪,王长健,仪建华,黄益智,李金键,张彪,许传龙
(1 东南大学火电机组振动国家工程研究中心,能源与环境学院,江苏 南京 210096;2 西安近代化学研究所燃烧与爆炸技术重点实验室,陕西 西安 710065)
火焰广泛存在于能源、电力、冶金、航空航天等领域,如汽车的内燃机、冶金工业的窑炉、燃气轮机、电站锅炉和火箭发动机、航空发动机等[1-3]。这些领域火焰温度的准确可靠测量有利于提高燃烧效率,降低污染物排放,保证生产安全。同时火焰三维温度分布快速、准确地测量既是燃烧过程机理研究的基础,也是燃烧装置设计的重要依据[4]。基于火焰辐射光场成像的三维温度场测量方法具有非侵入、系统简单、不需要信号发射装置等优点,获得了广泛的关注。
光场相机作为典型的光场信息采集装置,其成像原理是主镜头将物空间的辐射光线汇聚于微透镜面上,每个微透镜再将光线按入射方向离散化,记录在微透镜后面所覆盖的图像探测器的像元上[5]。相比于普通相机,光场相机不仅能够在单次曝光下以更高的精度记录火焰辐射的强度信息,还能分辨辐射光线的方向。利用单台或多台光场相机采集多个视角下的火焰图像,结合反演算法,可实现复杂火焰三维温度场的重建[6]。但是光场相机受到相机结构的限制,微透镜分离出来的探测线入射点分布相似,相邻探测光线方向角度变化极小,如Raytrix 相机图像探测器每个像素对应光束的锥形角小于0.015°,使得大量光线穿过相同的火焰网格。所以,火焰辐射光场信息具有低秩性和方向冗余性[7-8]。因此利用火焰辐射光场信息构造的温度场重建方程组的系数矩阵为大型稀疏病态矩阵,在求解过程中复杂的矩阵运算带来的时间成本和大型矩阵存储对计算机内存的要求,使得温度场重建过程往往需要数十分钟或小时才可完成。尤其是对于多光场相机系统,随着相机数量的增加,重建过程需要更为巨大的计算机资源和更长的耗时。因此有必要对光场采样进行优化,降低光场采样间的方向冗余性,以减少重建过程计算资源的需求和提高重建效率[9-10]。针对于光场采样特性的研究,Liu等[11]提出了像素采样锥形角以及物方采样角等指标,系统地研究了光场相机光学参数、图像探测器与微透镜阵列相对位置关系对光场采样特性的影响。Sun等[5]以单个像素为采样单元,提出了采样域、采样角等概念,比较了不同光场相机的采样光线在火焰内部空间的分布,分析了不同参数下火焰图像及火焰三维温度场重建结果。但是这些研究只局限于光场的采样特性的探讨,均没有提出减小光场采样方向冗余性的方法。
由于基于光场采样的火焰辐射光线入射角度相似,且火焰本身存在高度方向尺寸远大于径向尺寸的特点,受到机器学习中聚类思想和欠采样技术的启发,本文根据光线穿行火焰网格及探测线方向的特点,提出了一种基于特征光线选择的光场采样优化方法。该方法不依赖于火焰物性参数和光场相机的类型,首先对光线进行追迹,确定每根光线穿过的火焰网格信息,再分别按照光线穿行火焰网格的顺序及光线角度分布的特点,对火焰辐射光场采样进行光线聚类和圆周角聚类,最终选取特征光线以表征原始光场采样。同时利用特征光线进行了火焰三维温度场的重建,通过数值计算及实验研究的方式评价了所提方法的抗噪性和适用性。
1 测量原理
图1为普通相机和光场相机火焰辐射光线采样示意图,区别于普通相机,光场相机通过安装在主透镜和图像探测器之间的微透镜阵列将空间物体发出的不同方向的光线投射到图像探测器不同位置的像素上,可以通过一次曝光同时获取光线的二维空间分布和传播方向信息[12]。工业过程中,由于燃烧器结构以及燃料种类繁多,燃烧火焰是复杂且多峰的,例如,多喷管液体火箭发动机尾焰、多喷孔天然气发动机预燃室火焰。这就需要更为丰富且角度多样的辐射信息来重建火焰温度场。但单光场相机采集的光线角度变化差异小,提供的火焰辐射光场信息有限,因此本文采用多光场相机系统对复杂多峰火焰进行测量。图2为多光场相机测量系统示意图。该系统包含多台光场相机和被测对象。由同步控制系统对多个相机的火焰光场图像进行同步采集。相机沿环形滑轨布置在同一水平面的不同角度α上,α为相机主光轴与X轴的夹角。每个相机距离火焰中心距离相等。R和φ分别代表火焰的径向和周向方向。

图1 普通相机和光场相机光线采样
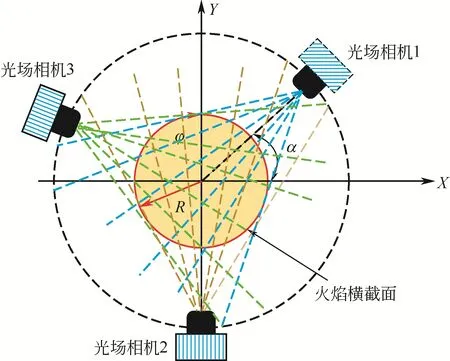
图2 多光场相机测量系统
1.1 光线追迹模型
多光场相机系统中,每个相机是相对独立完成光线追迹的,因此建立单光场相机光线追迹模型是多光场相机辐射光线追迹的基础。为了确定火焰辐射光线的空间和角度信息,从探测面每个像素开始,逆向追踪火焰辐射光线直至火焰内部,确定火焰辐射光线在火焰中的位置与方向。以图1(b)中红色光线1-2-3-4 为例,像素点1(x1,y1,z1)对应光线与主透镜的交点3(x3,y3,z3)关于相对应的微透镜中心点2(x2,y2,z2)共轭,物点4(x4,y4,z4)与微透镜中心点2 关于主透镜中心0(x0,y0,z0)共轭,因此,物点4的坐标可由式(1)~式(3)得到。物点4和火焰辐射光线与主透镜的交点3 位于同一条火焰辐射光线上,因此可以用这两点的坐标根据式(4)、式(5)求得火焰辐射光线的天顶角θ和圆周角ψ[13],光线天顶角、圆周角如图3所示。
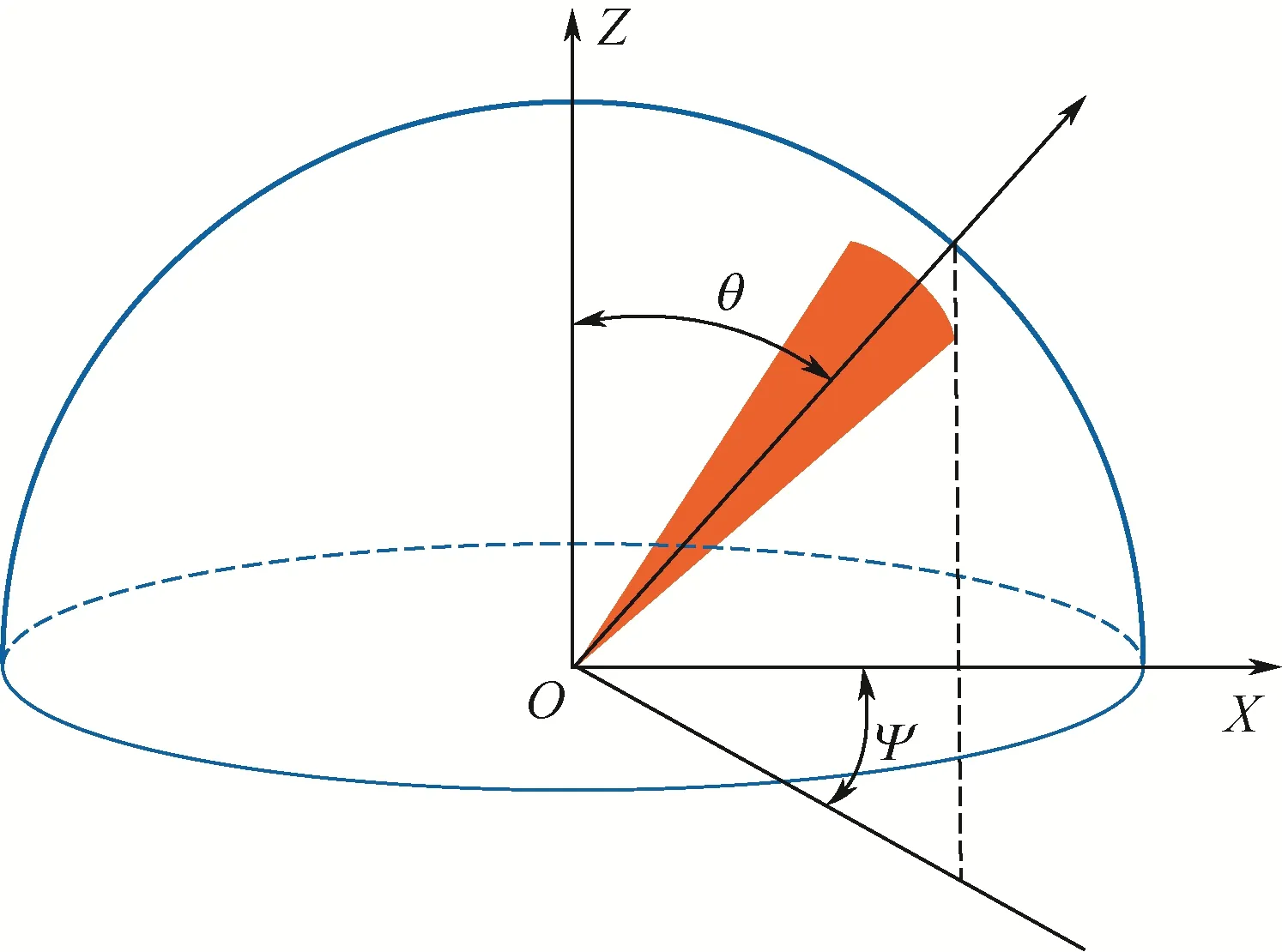
图3 火焰辐射光线天顶角、圆周角
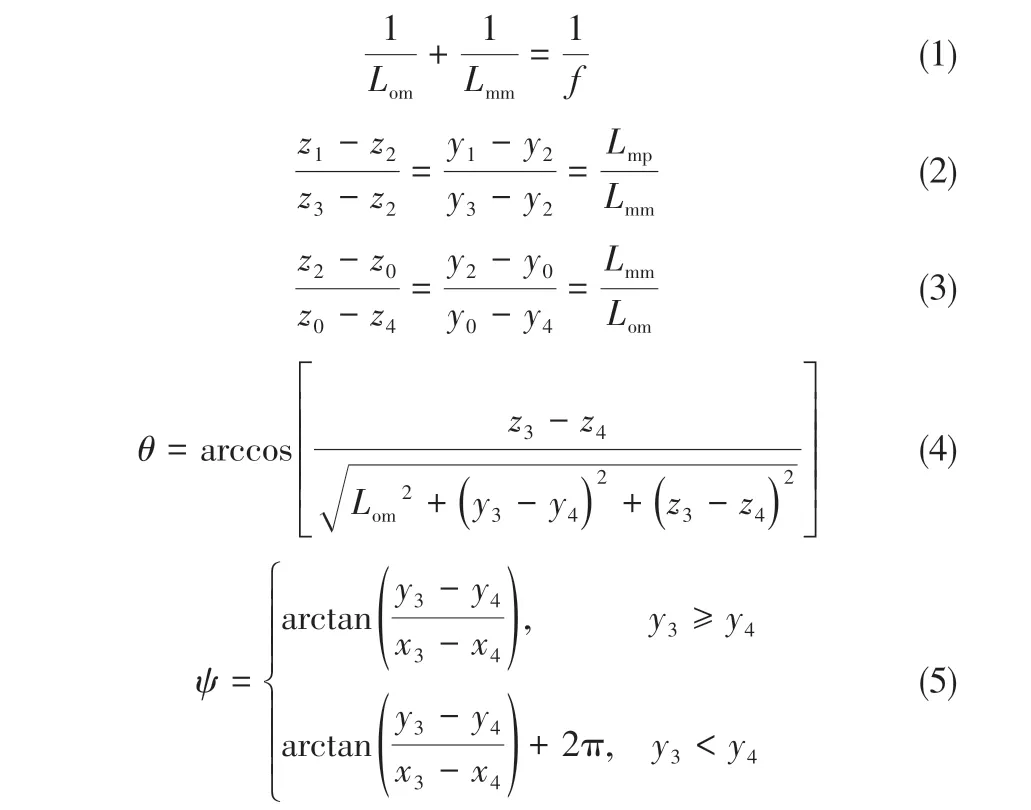
式中,f为主透镜焦距;Lom、Lmm、Lmp分别为火焰中心与主透镜、主透镜与微阵列和微阵列与图像探测器之间的距离。
1.2 辐射强度计算
由于火焰中的炭黑颗粒是吸收性粒子且粒径较小(<0.1μm),根据Mie 理论可知,炭黑颗粒散射能力远小于吸收能力,因此,本文只考虑火焰的吸收特性[14]。火焰辐射传输方程微积分形式见式(6)。

式中,Iλ(r,Ω)为在r位置处Ω方向上的光谱辐射强度,[W/(m2·μm·sr)];Ibλ(r)为在r位置处的黑体光谱辐射强度,[W/(m2·μm·sr)];κλ为吸收系数,m-1。将式(6)进行离散,可以得到式(7)、式(8)。
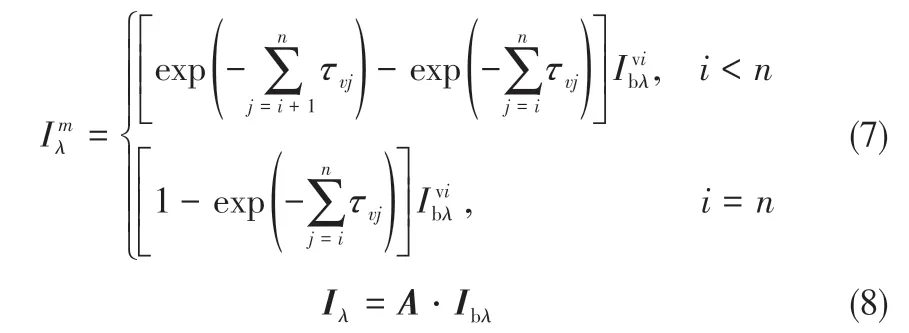
式中,τ为火焰辐射光线穿过当前火焰网格的光学厚度;m为火焰辐射光线的序号;Iλ为光场相机图像探测器探测到的火焰辐射光线的光谱辐射强度;n为火焰辐射光线穿过的火焰网格总个数;A为系数矩阵。
2 基于特征光线选择的采样优化方法
针对光场采样的低秩性和方向冗余性的问题,本文提出一种基于特征光线选择的多光场相机采样优化方法[15]。多光场相机系统中,每个相机是相对独立的,因此研究单光场相机采样优化方法是多相机采样优化方法建立的基础。单光场相机采样优化方法流程如图4所示。多光场相机采样优化流程具体步骤如下。
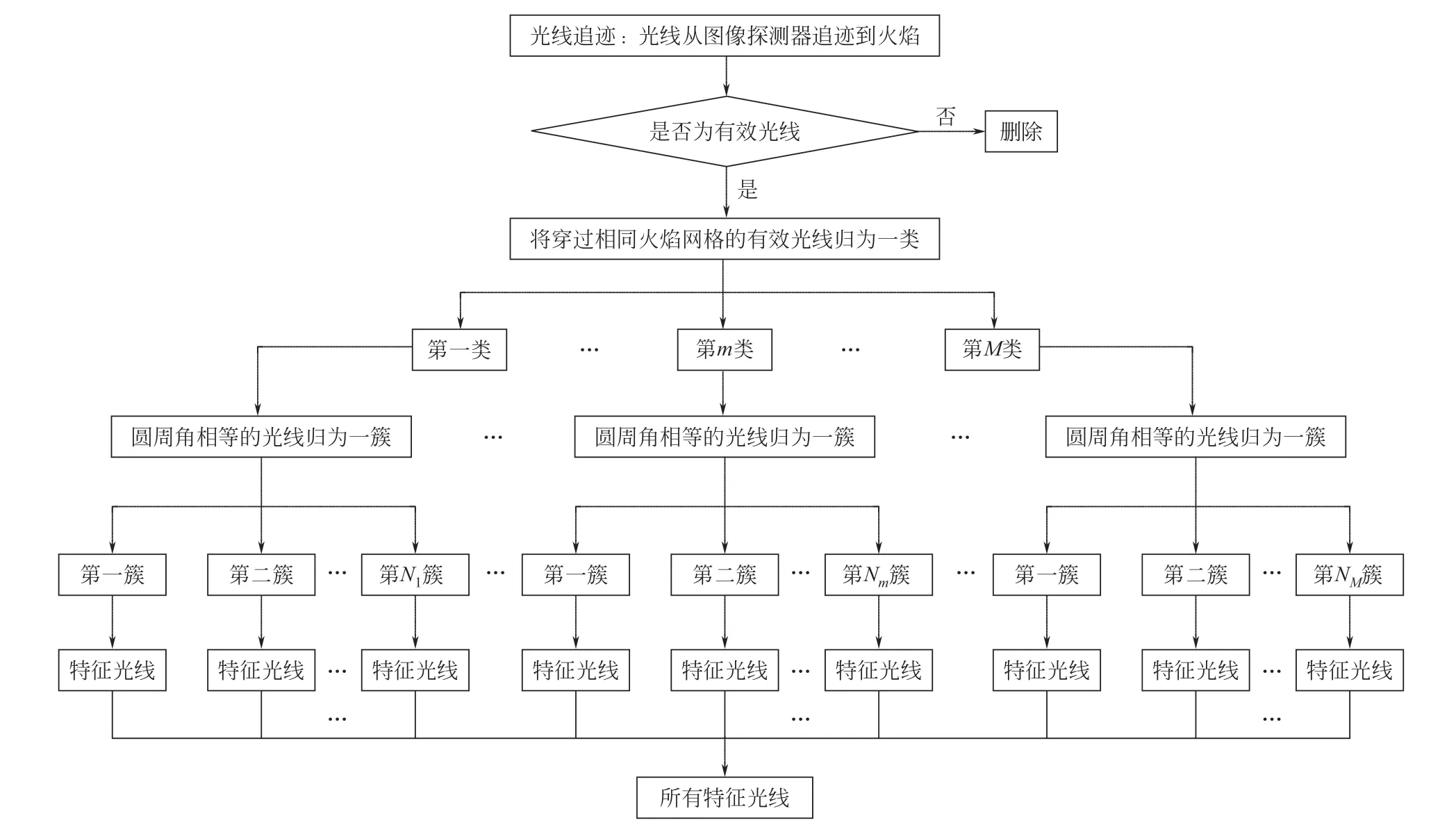
图4 光场相机采样优化方法流程
步骤一,网格划分:对火焰进行如图5所示的三维网格划分,并对划分的火焰网格进行编号,其中Z为火焰的轴向方向。
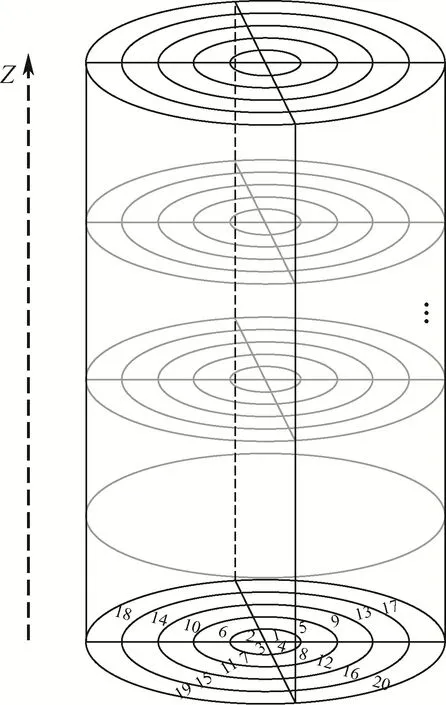
图5 火焰三维网格划分
步骤二,对所有相机的所有火焰辐射光线进行追迹:将光线从图像探测器追迹到火焰,并记录每根光线穿过的火焰网格编号以及每根光线的天顶角和圆周角。
步骤三,删除未穿过火焰网格的无效光线,保留穿过火焰网格的有效光线;有效光线进行步骤四~步骤八。
步骤四,光线聚类:将穿过相同火焰网格的有效光线归为一类。
步骤五,圆周角聚类:针对步骤四中的每一类,根据每类光线圆周角的分布进行圆周角聚类,将圆周角相等的光线归为一簇,得到穿过相同火焰网格且圆周角相等的每一簇光线的天顶角分布。
步骤六,选取步骤五中该簇光线对应天顶角中的3个特征天顶角,分别为最大、最小及距离平均值最近的天顶角。
步骤七,选取步骤六中特征天顶角所对应的光线作为该簇光线的特征光线。
步骤八,遍历圆周角聚类中的每一簇以及光线聚类中的每一类,确定最终特征光线。
3 结果与讨论
为评价所提采样优化方法的抗噪性和适应性,本文开展了数值计算和实验研究。数值计算中,火焰设置为圆柱体火焰,高度Z和底面半径R分别为0.0250m 和0.0066m。火焰的温度分布满足式(9),为双峰非对称分布,吸收系数设置为10m-1,温度分布如图6 所示。将火焰按周向(Nφ)、径向(NR)和轴向(Nz)划分为Nφ×NR×Nz=10×8×6=480个网格。相机结构参数见表1,其中fm为微透镜的焦距,Nm为微透镜个数,Np为每个微透镜覆盖的像素个数,dp为像素的尺寸。以布置在α=45°的相机为例,应用所提方法对光场采样进行优化,图7 为优化前后采样光线的分布。图7(a)红色方框内像素颜色为白色代表该像素对应光线穿过火焰,为有效光线,反之像素颜色为黑色代表该像素对应光线不穿过火焰,为无效光线。优化后的特征光线分布如图7(b)所示,其中红色方框内像素颜色为白色代表该像素对应光线为选取的特征光线。统计得到,光线总数量为518400 根,有效光线数为52816 根,特征光线数为7468 根。运用所提采样优化方法可有效减少光线间的冗余性。
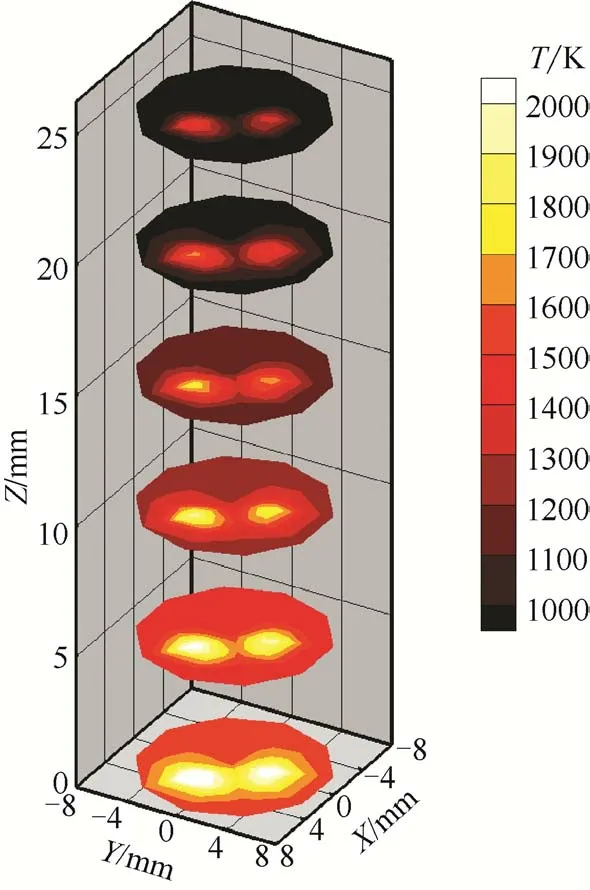
图6 双峰非对称分布火焰温度分布

表1 光场相机结构参数

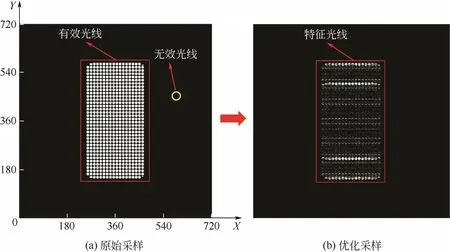
图7 优化前后采样光线分布
本文采用非负最小二乘算法对火焰三维温度进行重建,该算法能够保证求解结果的非负性,计算稳定性较好[16]。利用配置为Intel Core i9-9900K CPU@3.60GHz 的计算机进行计算。为了评价所提优化方法的性能,选取相对误差ΔT、平均相对误差ΔTmean作为评判的标准,定义如式(10)、式(11)。
式中,Trst为重建的火焰温度值;Tori为设定的火焰温度值;N为火焰划分网格的总个数。
3.1 抗噪性能分析
抗噪性能分析是检验采样优化方法鲁棒性的必要测试。本文针对所提采样优化方法在双光场相机系统中的抗噪性能进行了分析,相机置于α=45°和α=315°两个位置,分别在探测到的辐射光线强度上加入噪声水平γ=0、1%、3%和5%的高斯型随机噪声[10]。布置α=45°和α=315°的相机探测到的有效光线总数均为52816根,优化后的特征光线总数分别为7468 根和7141 根。利用原始采样和优化采样分别进行了不同噪声条件下的火焰温度场重建,重建结果如图8所示。从图中可以看到,尽管添加了不同水平的噪声,利用原始采样和优化采样均能准确地重建火焰温度场,重建结果差异较小,说明基于特征光线选择的优化采样方法鲁棒性强,抗噪性能良好。同时计算了运用不同采样重建时的最大重建误差、平均重建误差,如图9 所示。可以看到,当γ=0、1%、3%、5%时,尽管利用优化采样重建时平均重建误差有小幅度增长,但最大重建误差得到了改善,如当γ=5%时,利用原始采样、优化采样的最大重建误差是92.59%和81.87%,重建过程得到了极大优化。同时比较了运用不同采样进行重建的时间,当γ=0、1%、3%、5%时,利用原始采样进行重建耗时为2320s、1486s、1301s、1187s,利用优化采样进行重建耗时为199s、106s、92s、82s,利用优化采样是利用原始采样重建时间的1/11、1/14、1/14和1/14,重建时间大幅度减少,这是由于所提采样优化方法只选择少量特征光线表征原始光场采样,减小了重建方程组的规模,从而提高了重建的时间分辨率。以上结果表明,基于特征光线选择的采样优化方法不仅具有良好的抗噪性能,而且还能提高火焰温度场重建的时间分辨率,优化重建过程。
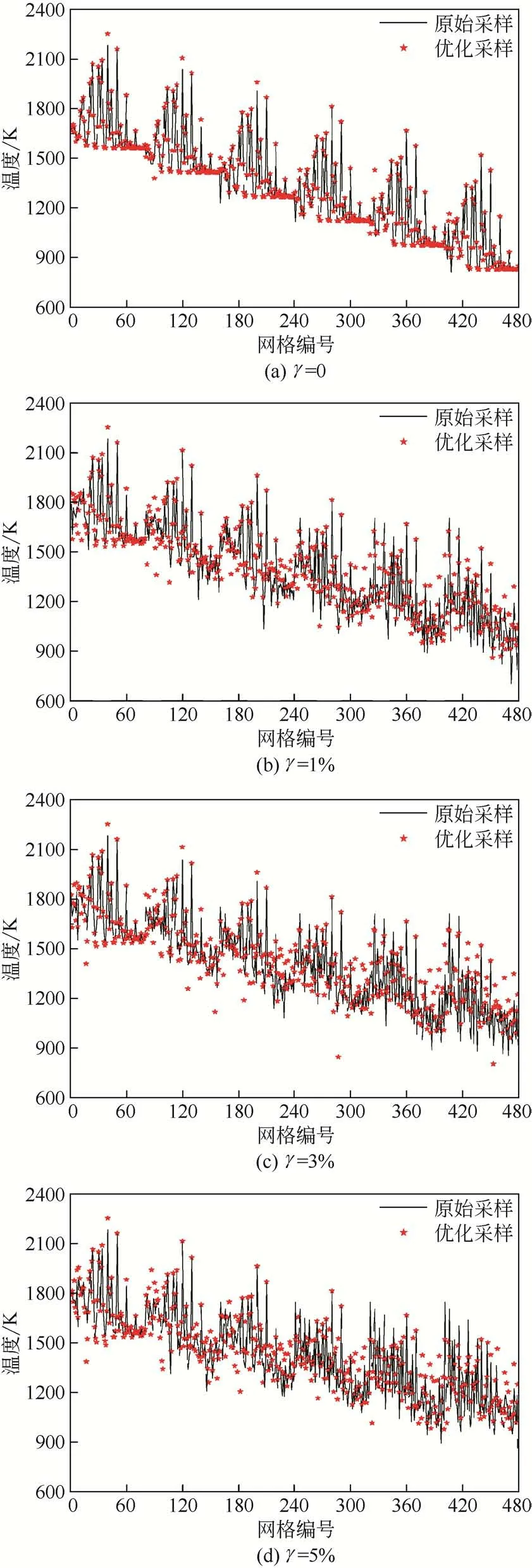
图8 不同噪声条件下利用原始采样和优化采样火焰三维温度场重建结果
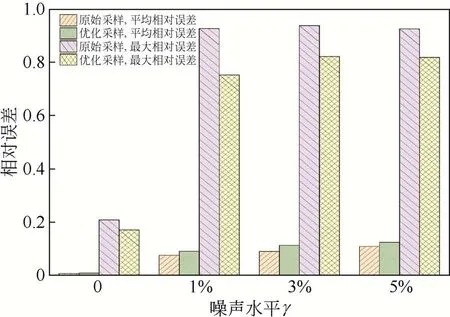
图9 不同噪声条件下火焰三维温度场重建时的最大重建误差、平均重建误差
3.2 适用性能分析
随着相机数量的增加,重建求解方程的维度也在成倍增长,这势必带来重建时间分辨率的急剧降低,因此有必要评价基于特征光线选择的采样优化方法对多光场相机测量系统的适用性。通过表2中的计算工况对所提优化方法的适用性进行了分析,同时计算了不同工况利用原始采样和优化采样进行重建的耗时。不同角度相机的原始和优化采样光线数量见表3,得益于圆柱体火焰的假设,原始采样光线数量在任何角度下均相同。由于相机布置角度不同,位于探测器相同位置的像素对应光线起始点坐标存在差异,导致光线穿行火焰网格的方式不同,优化采样光线数量也不尽相同。但布置角度相似的相机,如位于α=45°和60°,α=300°和315°的相机,此时相机布置角度差异较小,优化采样光线数量也相当。针对表2中的计算工况,分别利用原始采样和优化采样进行了火焰三维温度场的重建,重建结果如图10 所示。可以看到,优化采样保持了原始采样光线间的差异性和丰富性,能够准确地重建火焰温度场,同时由于优化采样光线数量的减少,重建的时间分辨率得到了大幅度提升,重建时间减少为利用原始采样重建时间的1/14 左右。将重建结果与原始温度分布进行了比较,计算了每个网格的重建相对误差,结果如图11 所示。以上结果表明,所提优化采样方法不仅能够保证重建的准确性,减小部分网格的重建误差,而且可以提高重建的时间分辨率,在多光场相机系统中具有良好的适用性。
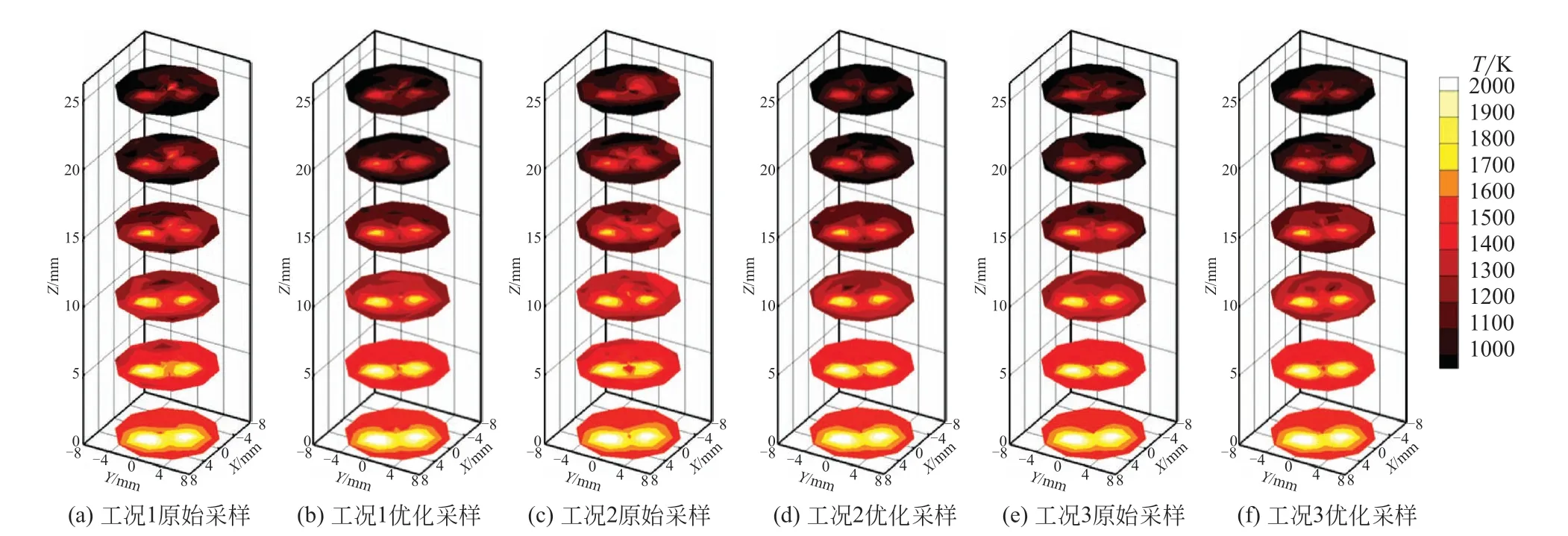
图10 不同相机数量条件下利用原始采样和优化采样重建的火焰三维温度场

图11 不同相机数量条件下利用原始采样和优化采样重建火焰三维温度场的相对误差
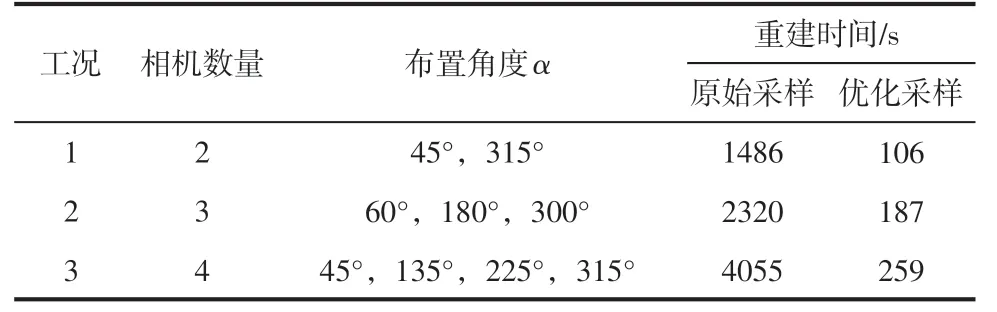
表2 多光场相机系统计算工况

表3 原始采样和优化采样光线数量
3.3 乙烯层流双峰扩散火焰实验验证
本文开展了乙烯层流双峰扩散实验验证来评价所提优化方法在实验研究中的可行性。实验中,多光场相机系统包含光场相机2 台,分别布置在α=45°和α=315°两个位置,光场相机为本文作者课题组自组装的笼式光场相机,相机的主透镜焦距为50mm,微阵列的尺寸为100×100μm,微阵列的f#=4.2。火焰为乙烯层流双峰扩散火焰,乙烯流量为90mL/min,空气流量为1m3/h。测量系统搭建及燃烧器设计的详细参数见参考文献[17]。多相机同步控制采集不同角度的火焰光场图像,为保证实验不受杂散光的干扰,实验在暗室中进行,曝光时间设置为170μs。图12为采集到的两个角度的火焰光场图像,可以看到,光场图像随角度的变化存在差异,多视角下的火焰图像更能反映火焰的轮廓信息。将火焰视为圆柱体火焰,划分Nφ×NR×Nz=20×20×15=6000 个网格,对图像探测器每个像素对应光线进行追迹,得到有效光线数为137160 根,光线数量十分巨大。利用本文提出的基于特征光线选择的采样优化方法对光场采样进行优化,优化后采样光线的数量为38490根。同时利用优化采样对火焰温度场进行重建,重构时间仅为1211s,重建的温度分布如图13 所示,重建的火焰温度区间为800~2100K,重建结果与文献[18]结果较为吻合,利用优化采样可以准确地重建乙烯层流双峰扩散火焰的三维温度场。结果表明,基于特征光线选择的采样优化方法在实验研究中是可行的,不仅能够有效降低多光场相机光线间的冗余性,同时能够提高重建的时间和空间分辨率。
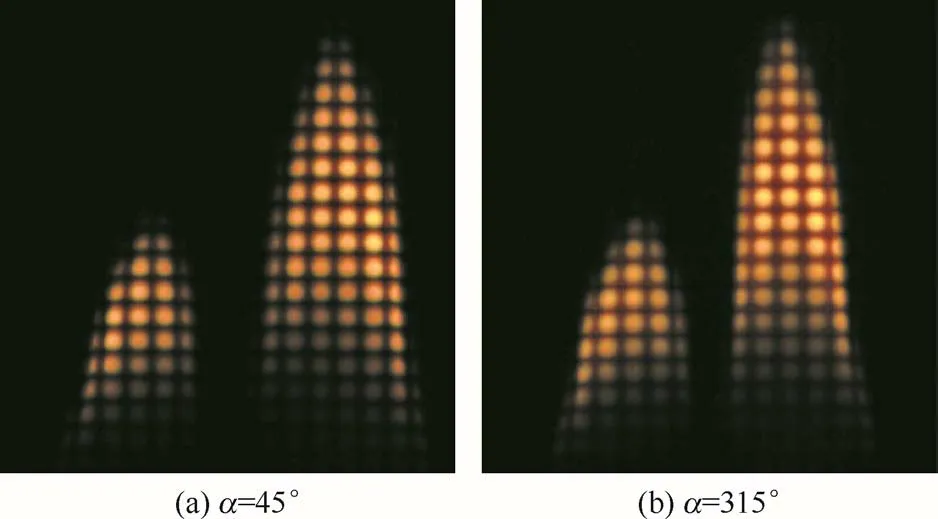
图12 α=45°和α=315°的光场相机采集的火焰光场图像
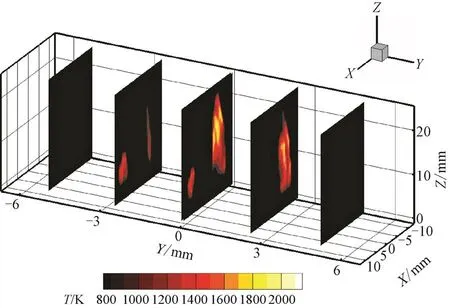
图13 重建的乙烯层流双峰扩散火焰三维温度场
4 结论
(1)本文提出了一种基于特征光线选择的多光场相机采样优化新方法。该方法可有效改善辐射光线间的方向冗余性问题。
(2)系统分析了所提方法的抗噪性及对多光场相机测量系统的适用性。结果表明,所提方法具有良好的抗噪性能,当向辐射强度中添加5%的随机型高斯噪声时,仍可准确重建火焰三维温度场;在多光场相机测量系统中,布置在不同角度的相机,由于光线起始点坐标的变化,最终选择的特征光线数量不尽相同;利用优化采样进行火焰三维温度场重建,可优化重建过程,减少部分网格的重建误差,提升重建效率,重建时间约为利用原始采样重建时间的1/14。
(3)利用所提方法对实验采集的乙烯层流双峰扩散火焰进行采样优化,利用优化采样进行火焰三维温度场的重建,重建的时间和空间分辨率均有显著提升。
