基于无人机的露天矿粉尘立体化监测方法
2021-12-22张瑞新孙健东孔令振马嘉颐
刘 鑫,张瑞新,,孙健东,,李 淋,孔令振,马嘉颐,姚 辉,白 熊
(1.华北科技学院,河北 三河 065201;2.中国矿业大学(北京) 能源与矿业学院,北京 100083;3.巴音孟克纳源露天煤矿,内蒙古 鄂尔多斯 017000)
露天煤矿生产过程中,大量煤和岩石的破碎会产生极大浓度的粉尘颗粒,这些综合性混合粉尘主要包含大量煤尘、岩尘及其少量的其他物质,产生的综合性混合粉尘会长时间悬浮在空气中,混合粉尘的危害性主要体现在造成人员伤亡、降低采场能见度和增加设备损耗[1],因此,露天煤矿粉尘浓度监测作为露天煤矿进行降尘的前提条件,显得尤为重要。
然而,露天煤矿粉尘存在“产尘点多、产尘量大、不定时、分散程度高、扩散范围广、受气候条件影响较大”等特点,而常规的单一监测技术手段存在监测范围小、监测点分布少等缺陷。因此,有必要探求更为精确、快捷的监测手段。
无人机进行环境监测具有时效性强、成本低、灵活性高等优点。近年来诸多学者围绕无人机在环境监测等领域的应用开展了研究工作。中科院安徽光机所[2]自主研发的基于无人机平台成功获取飞行区域大气污染成分NO2等的二维时空分布。浙江第二测绘院[3]通过无人机搭载空气质量监测器实时监测不同时间、不同地点、不同高度的大气污染的连续数据。长安大学[4]通过无人机搭载PM2.5监测仪器进行垂直高度PM2.5浓度监测。上述研究工作充分验证了无人机应用于监测工作中的可行性。
综上,利用无人机搭载粉尘监测设备进行粉尘浓度监测,可以完成大范围、高精度的连续性监测,真实有效地反映监测区域内的粉尘浓度分布情况,揭示不同高度粉尘分布情况,寻找粉尘气团运移规律,从而为安家岭露天煤矿有针对性地开展粉尘污染治理工作提供数据支撑。
1 工程背景
安家岭露天煤矿位于山西省朔州市,采用单斗—卡车工艺。由于电铲、卡车都是超大型设备,所以设备产尘量大[5]。目前安家岭露天煤矿所安装的粉尘监测仪为地面固定式,但在现场监测应用过程中,发现以下几个问题:
1)监测点数量少。目前安家岭露天煤矿只在观礼台安装一台粉尘监测仪,不能真实地反映采场内的粉尘情况。
2)受气候环境影响大。该监测设备依靠太阳能板进行供电及存储,当电量不足,会导致数据采集器停止工作。
3)传感器校准不便。长时间监测后需要对传感器重新进行精度校准,由于监测仪器安装在2m高的立杆上,重新校准需要拆装立杆,费时费力。
鉴于上述原因,本研究利用无人机搭载监测设备,对安家岭露天煤矿进行数据采集。
2 无人机和粉尘监测设备选型
2.1 无人机选型
按飞行平台构型,无人机分为固定翼无人机、旋翼无人机等[6]。与其他几种无人机类型相比,多旋翼无人机通过调节多个电机转速来实现升力的变化,进而达到控制飞行姿态的目的。它具有操作简单,能在空中实现定点悬停,操作简单,适用于常规的大气监测[7]。因此,选择大疆M600多旋翼无人机作为粉尘监测设备的搭载平台。
2.2 粉尘监测设备选择
目前市场上常见的有两种颗粒物检测方式,一种是红外传感器,另一种是激光传感器。由于红外传感器容易受到外部光源的干扰,同时红外传感器基本都是采用被动风道设计,依靠空气的自然流动进行数据采集,且在出厂前都没有进行数据输出校准,因此容易造成检测数据误差大。因此该实验选择激光传感器检测模块,其可检测的颗粒物参数包括PM2.5、温度、湿度和气压。
2.3 粉尘监测设备安装位置确定
考虑到多旋翼系统中各个桨叶之间存在气流干扰,在考虑空气黏性的影响[8],结合FLUENT对桨叶进行模拟,根据模拟结果将监测器安装到无人机干扰最小的位置,并给传感器安装主动式进风系统,避免桨叶旋转对监测数据造成干扰[9]。模拟流程包括:
1)模型构建。由于无人机的桨叶对旋翼的能量转化起着十分重要的作用,因此必须构建准确的桨叶几何模型[10]。在桨叶的实体模型构建完毕后,对无人机主体部分进行绘制。通过布尔运算,把无人机部分从流域中删减掉,最终得到用于计算的几何模型。无人机模型如图1所示。

图1 无人机模型
2)网格划分。网格划分是进行数值模拟分析至关重要的一步,它直接影响着后续数值计算分析结果的精确性。由于无人机桨叶是空间翼形,结构复杂,因此采用非结构化网格划分方案。
3)湍流模型。由于旋翼周围的流场较复杂,而Realizablek-e模型广泛应用于转均匀剪切流、边界层流动、带有分离的流动,能够较好地捕捉旋转部件的流场信息,因此使用该模型进行模拟[11]。
4)计算方法选取。采用三维N-S方程。
5)旋转模型选取。选择FLUENT中的MRF旋转模型,将叶片旋转计算域内的流场简化为叶片在全位置的瞬态流场,瞬态流场按稳态问题计算[12]。
无人机飞行周围空气气压如图2和图3所示。可以看出,无人机桨叶旋转时,桨叶与桨叶之间的气压会低于周围空气中的气压。而在多旋翼无人机飞控系统周围的气压与周围大气压相近,且有足够的设备安装空间。因此,为了使监测设备受到较小的气流扰动,确保监测数据误差的最小化,将监测设备安装在无人机飞控中心正上方。
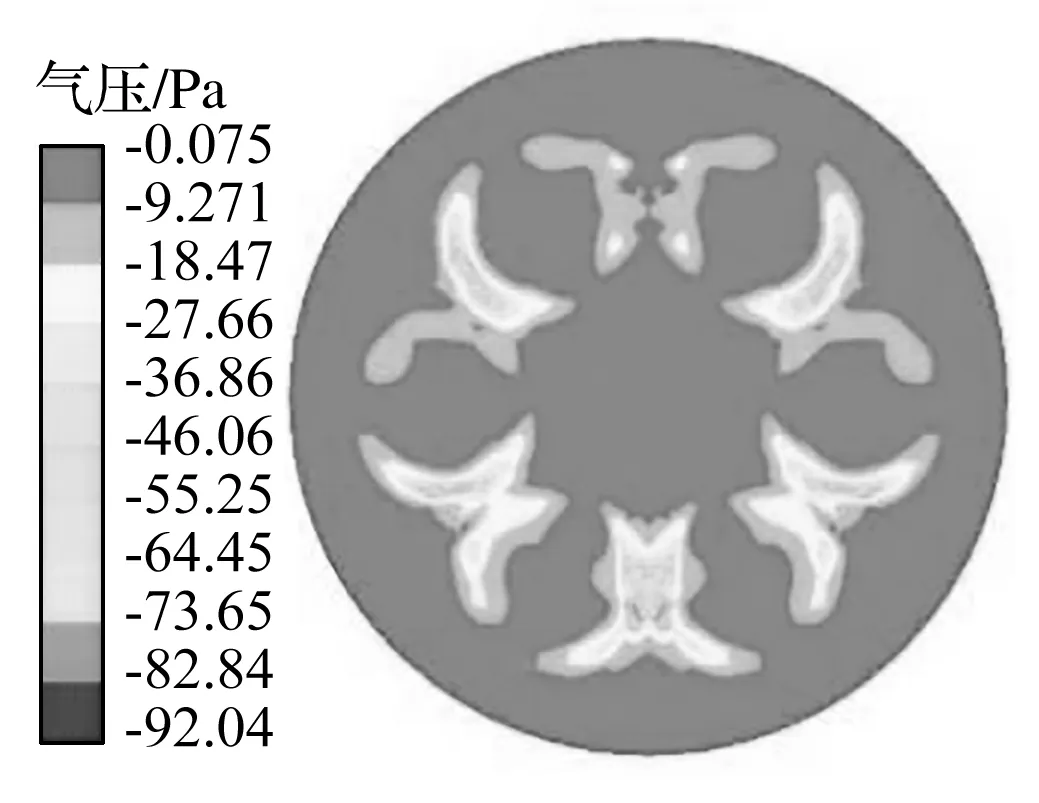
图2 无人机旋翼周围气压场

图3 无人机周围气压场
3 数据来源及实验过程
2020年11月25日至12月3日之间在山西省朔州市安家岭露天煤矿,利用无人机监测平台对采场范围内PM2.5、温度、湿度和气压等因素进行监测。
以安家岭露天煤矿为研究对象,根据安家岭露天煤矿采场范围确定监测范围。安家岭露天矿采场如图4所示。

图4 安家岭露天矿采场
安家岭露天矿航拍效果如图4所示。在了解安家岭露天矿推进方向、各个环节作业区域后,使用Arcgis软件规划出无人机的飞行范围,即图4中框线内区域。该区域中包含了安家岭露天矿穿、爆、采、运、排五个作业环节。
在飞行监测前,进行预飞行试验。首先,使用DJI GS Pro软件进行航线划分,在考虑无人机的信号传输距离、续航时间等参数后,对原规划区域进行适当缩小。无人机航线规划如图5所示。

图5 无人机航线规划图
其次,在无人机起飞前为了确保监测仪器的测量系统的准确性,需要对仪器进行校准。先用气帽盖住需校准的传感探头,并通入流速为1~3L/min的已知浓度的目标气体,使其充满整个气帽。待读数稳定后,计算新敏感度校正系数,通过新敏感度校正系数对设备的监测值进行校准。新敏感系数计算见式(1):
式中,αn为新敏感度校正系数;ρ为通入的气体浓度;αp为当前敏感度校正系数;β为设备当前监测值。
待一切准备就绪后,无人机飞手在地面控制无人机起飞。
另外,无人机进行作业前,需掌握当前天气情况,供日后参考和分析。11月25日至12月3日之间的天气情况见表1。

表1 监测时天气状况表
测量当日,无人机在安家岭露天煤矿标高1250m的小观礼台起飞,分别对小观礼台上方50m、75m、100m、125m、150m、175m、200m和300m等高度进行粉尘浓度采集。数据采集过程中,无人机最大的飞行高度为300m,最大水平飞行面积为1.6km×1.6km,单航次飞行时间约为20min。
实验过程中的监测数据均存入设备自带的内存中。在监测结束后,导入电脑中。为提高数据之间的匹配度,本实验以5s为间隔对数据进行等间隔处理[13]。
4 结果分析
4.1 PM2.5水平分布
由于在不同高度下,PM2.5浓度差异较大,因此本研究采用变异系数来分析不同高度下粉尘浓度的分布情况。在同一高度上的PM2.5变异系数越小,说明PM2.5的水平分布较均匀,大气垂直湍流能量越小,PM2.5变异系数见表2。
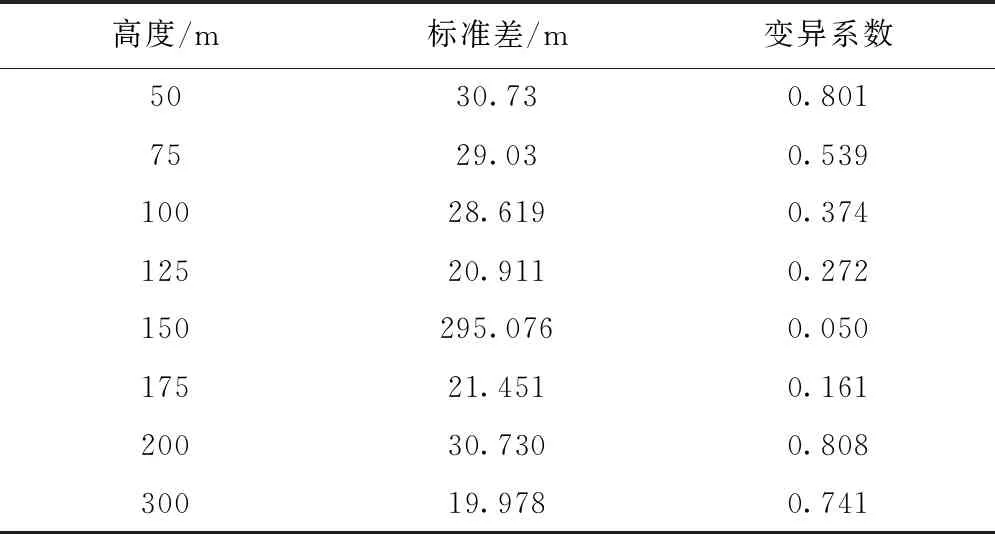
表2 PM2.5变异系数
在标高1300m至标高1550m等7个空域中,PM2.5的浓度变异系数在5.04%~76.5%之间,在标高1300m时变异系数最大,说明在标高1300m空域中大气水平湍流能量最强。总体上看,从标高1300m到标高1400m,变异系数随着高度的增加而减小,在标高1300m到标高1350m高度层之间变异系数显著减小,从76.5%降至27.35%。从标高1400m到标高1450m空域中的变异系数呈现小幅度的变大。而标高1450m至标高1550m高度层又呈现随着高度增加而减小的现象。该现象验证了PM2.5水平分布与大气湍流活动呈负相关性[14]。
针对不同标高的PM2.5浓度,以0~200为浓度限值绘制出PM2.5浓度分布图(图6)。由图6可知,在同一尺度条件下PM2.5有着较为明显的分层变化。在标高1300m和标高1325m高度空域,PM2.5浓度值较低,其中,在标高1300m空域有明显的南北浓度划分,越靠近北帮浓度越高,即越靠近采装区域PM2.5的浓度越大。随着高度的增高,在到达标高1350m和标高1375m高度空域时,局部区域的PM2.5浓度值变大。待上升至标高1400m空域,PM2.5的浓度值达到最大且有明显的聚集现象。这与测量当日采场内多处产生自燃现象有关,加之测量当日风速较小,温度较低,PM2.5不易扩散,积聚在这一高度层,导致监测的数值偏大。在高度到达标高1425m和标高1450m空域后PM2.5的浓度较标高1400m略微减少,这是因为部分PM2.5向下沉降,使得略低的标高1400m空域中的PM2.5浓度增加。最后,在标高1550m空域,PM2.5的浓度达到所有监测高度的最小值。
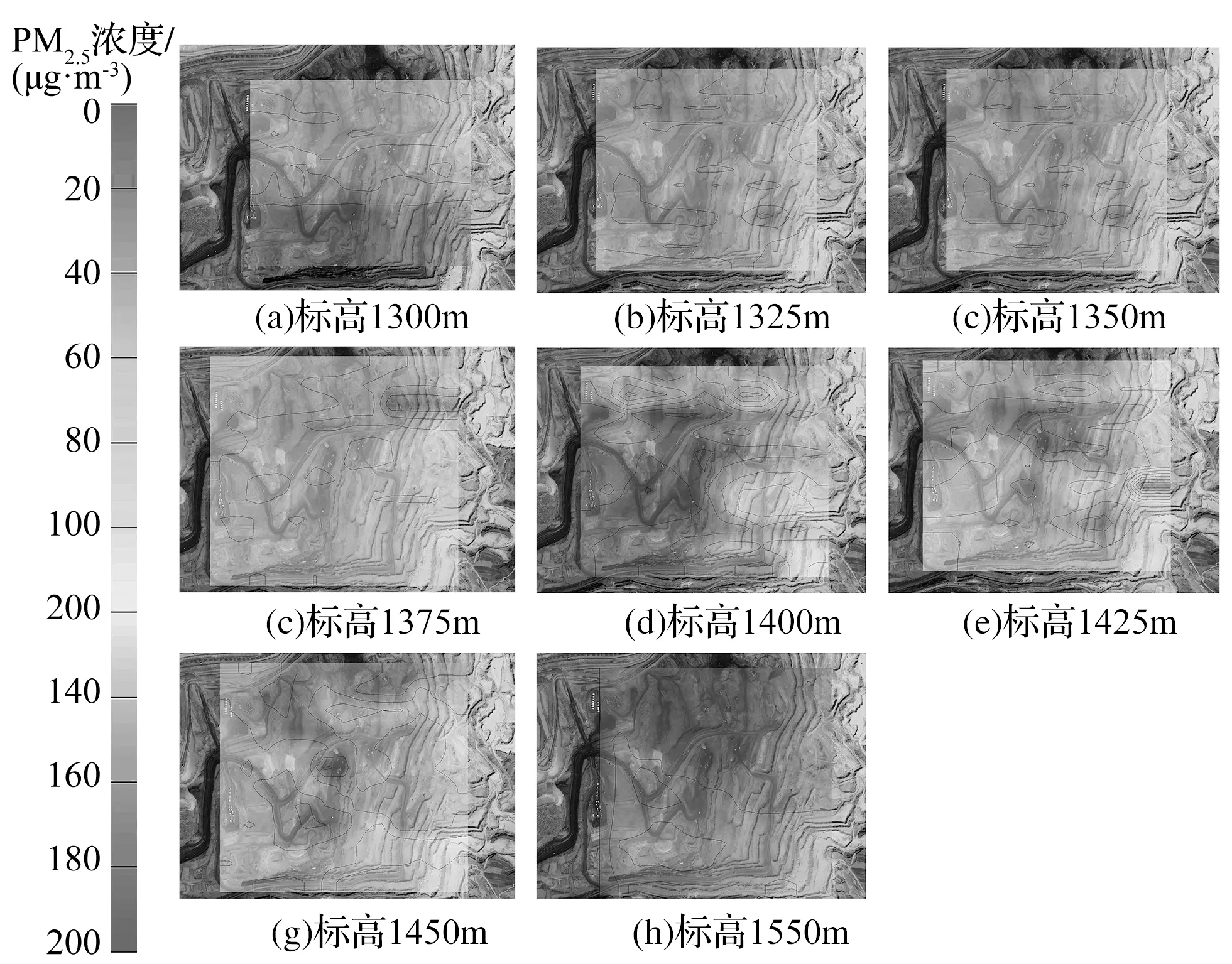
图6 不同标高的PM2.5浓度分布图
4.2 PM2.5垂直分布
以小观礼台为起飞高度0点,在不同时间下测量的PM2.5浓度。其高度与PM2.5关系如图7所示。从图7可知,PM2.5浓度随着高度的增加而逐渐下降。而且随着10点后温度的上升,PM2.5浓度快速下降。

图7 高度与PM2.5关系图
使用气温垂直递减率α表征PM2.5随高度增加其气温的变化程度,如图8所示。由图8可知,10点和11点的α数值较大,分别为46μg/(m3·100m),27μg/(m3·100m)。11∶30的γ数值最小为2μg/(m3·100m)。10点200~300m的α值为11∶30的9.2倍。10点、10∶30和11点测得的数据表现出了较为明显的分层现象。10点时,60~125m、125~190m、190~225m三个高度之间的PM2.5浓度变化较大。11∶30往后PM2.5在垂直方向上的浓度整体波动较小。

图8 高度与温度关系图
在10∶00的气温垂直递减率较小,其中在100~200m高度层时气温垂直递减率最小为0.4℃/100m,在0~100m高度层气温垂直递减率最大为0.789℃/100m。从整体上看,100~200m高度层的气温垂直递减率均小于0~100m、200~300m高度层,这说明在100~200m空域时大气层结构较为稳定,不利于PM2.5的垂直扩散。从PM2.5的浓度变化趋势图看,在10∶00的130m、11∶30的175m高度处出现了两个PM2.5的浓度峰值。
在每个时间段的175~210m高度层之间存在较厚的等温层。由于等温层、逆温层的存在,阻碍了PM2.5向上垂直扩散,使得PM2.5在等温逆温层中积聚,形成了两个PM2.5的浓度峰值。随着温度的缓慢升高,PM2.5垂直扩散趋于平稳。安家岭露天煤矿冬季粉尘扩散可以分为两个过程,垂直上升和水平输送。标高1300~1325m空域的PM2.5,主要呈现垂直上升扩散;第二部分为高于标高1325m空域的PM2.5,表现为高空水平输送扩散。
5 结 论
1)通过无人机进行粉尘浓度监测,具有响应时间短,拓展性强等优点。实验证明,用无人机搭载监测设备,对露天煤矿区采场上方不同高度的空域进行PM2.5监测是可行的。该方法为追踪露天煤矿粉尘气团的运移提供了新的技术手段。
2)安家岭露天煤矿冬季PM2.5扩散污染主要由两部分组成,第一部分为标高1300~1325m空域的PM2.5,主要呈现垂直湍流扩散;第二部分为高于标高1325m空域的PM2.5,表现为高空水平输送扩散。
3)大气湍流运动对PM2.5浓度的时空变化明显。PM2.5浓度的水平均一性分布与大气湍流活动剧烈程度呈负相关性。在安家岭露天煤矿小观礼台上方175~210m高度层之间存在较厚的等温层,阻碍了PM2.5向上垂直扩散。