高空大型滑模钢平台整体吊装安装技术
2021-12-21陈杨化胡卫兵喻宁招张锋凌张凤举王贵荣邹丽文成家州
陈杨化 胡卫兵 喻宁招 张锋凌 张凤举 王贵荣 邹丽文 成家州
中建三局第二建设工程有限责任公司 湖北 武汉 430074
在钢筋混凝土筒体结构施工中,由于存在滑模钢平台刚度和稳定性差、吊装定位准确性难以保证及与下部结构连接困难等问题,通常采用分段吊装、空中拼接技术,但工期耗时长、施工成本高[1-4]。针对类似情况,本项目将采用滑模钢平台地面组装后整体吊装安装技术,在降低建造成本的同时,极大地节约了施工工期。
1 工程概述
国外某光热光伏混合电站项目的吸热塔高262 m,塔身51 m以下为方形结构,51~82 m为方形结构变成圆形的过渡段,82 m以上为纯圆形结构。根据拟定方案,待混凝土筒壁施工至51 m后,采用地面组装整体吊装的方式完成更换滑模钢平台的作业任务。
该滑模钢平台为方形钢构架结构,长、宽约30 m,分别由8榀主辐射梁、8榀次辐射梁、1个中心鼓圈构成。每榀辐射梁由2片钢桁架平行布置组成,每片钢桁架高1.85 m,杆件宽80 mm,相邻2片桁架间距85 mm,用于固定滑模门架。每榀主梁重约8.6 t,次梁重约5.3 t。每榀辐射梁间使用若干工字钢进行连接。钢平台整体重约150 t(图1)。

图1 平面布置示意
2 整体吊装工艺流程
悬臂架作业平台搭设→支撑系统安装→吊点设计→吊索具设计→吊装安装→倒链调节→安装完成
3 吊装准备
3.1 悬臂架作业平台搭设
由于平台安装部位位于吸热塔筒壁51 m高空处,吸热塔本身墙体宽度较小,无足够作业空间和立足点,故需要沿筒壁搭设一圈临时作业平台,便于工人在安装过程中高空作业。
在筒壁混凝土施工时提前预埋好螺栓锥形头,然后采用塔吊将地面拼接好的悬臂架平台吊装至安装点,工人以电梯平台为起点,同时向两边进行安装。前一个安装完毕的平台将成为后一个平台的操作平台。
3.2 支撑系统安装
与地面安装相比,在高空安装最大的困难是缺乏可靠的支撑系统。
本次整体吊装所采用的支撑体系分为2个部分,牛腿支撑和工字钢支撑。牛腿支撑负责支撑门架,工字钢支撑负责支撑钢平台。启滑之初,门架支撑杆下部并无凝固的混凝土作为固定,若将钢平台与门架直接接触,由门架承担平台质量,则支撑杆容易失稳。
因此,需在混凝土筒壁顶面设置工字钢支撑单独支撑钢平台,使门架与钢平台分离。待滑模混凝土浇筑开始之后,门架缓慢上升,与钢平台接触,钢平台荷载由工字钢支撑体系转换为门架系统来传递荷载。此时可将工字钢支撑和牛腿支撑拆除。
模板系统及门架内外腿需要固定在墙体两侧,为了固定门架位置,在吸热塔筒壁两侧按照设计角度放线并安装牛腿,起吊就位时,门架内外腿着力在牛腿上,通过调整垫块来确保安装标高准确无误。
在主要门架两侧设置HEB160工字钢,待门架吊装就位后,使用2根UPN160槽钢连接工字钢顶部。待所有工字钢支撑安装完毕之后,测量顶部标高,使用垫板将所有的支撑顶部调平至同一水平高度。待钢平台吊装就位后,平台荷载通过该支撑体系传递到混凝土筒壁上,确保安装过程安全可靠(图2)。

图2 支撑系统示意
临时牛腿安装通过螺丝及预埋在筒壁上的套筒固定在吸热塔筒壁内外部,间距2~3 m均匀布置且与支撑门架一一对应,使每片门架以简支方式布置在牛腿上方。临时支撑工字钢的下端与筒壁顶面预埋件焊接连接,顶端垫5~10 mm厚的钢板简支,用于滑模钢平台辐射梁的支撑点。布置间距与辐射梁相对应,为4.5~5.0 m。
在临时支撑系统安装完毕后,按照设计方案测量放线,使用EC550塔吊按顺时针顺序逐个吊装门架就位,门架就位后通过门架连杆及φ32 mm钢管与相邻门架首尾相连形成整体,确保滑模钢平台在吊装就位过程中各着力点受力均匀,安装工作安全可靠。
4 钢桁架整体吊装
4.1 吊点设计
根据有限元模型分析,在所有节点变量空间内进行组合计算,通过计算得到的内力结果计算桁架的应变能,对不同的应变能结果进行排序,得到最小的应变能。此状态下吊装将使钢平台的各杆件应力及节点位移都处于一个较合理的状态,吊点约束组合就可以认为是最佳吊点组合。
此时,钢平台杆件最大应力比为0.9<1.0;最大位移为70 mm<L/300=75.3 mm。钢平台整体刚度和稳定性满足吊装条件。
最终确定的吊装方案为每榀主梁上设置2处吊点,距离中心点分别为8.5 m和11.3 m;每榀次梁上设置1处吊点,距离中心点15.5 m,共24处吊点(图3)。
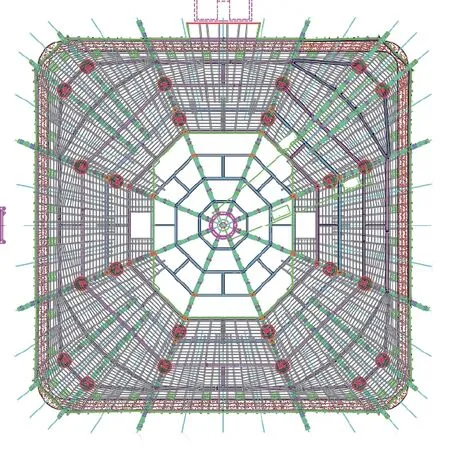
图3 吊点平面布置示意
4.2 吊耳
钢桁架吊装采用特殊设计的轴式吊耳,吊索与销轴接触传力,销轴通过垫板将力传递至桁架上弦杆及竖腹杆。该形式的吊耳可以避免焊接连接对桁架造成的结构性损伤,由于耳板不受力,摩擦造成损伤断裂的风险也能得到规避,且方便安拆。吊耳采用螺杆拴在钢桁架的上弦和斜撑节点处。
4.3 吊装索具设计
根据模型分析结果,配备相应的吊装索具(表1),并核算吊索应力,确保吊装安全。
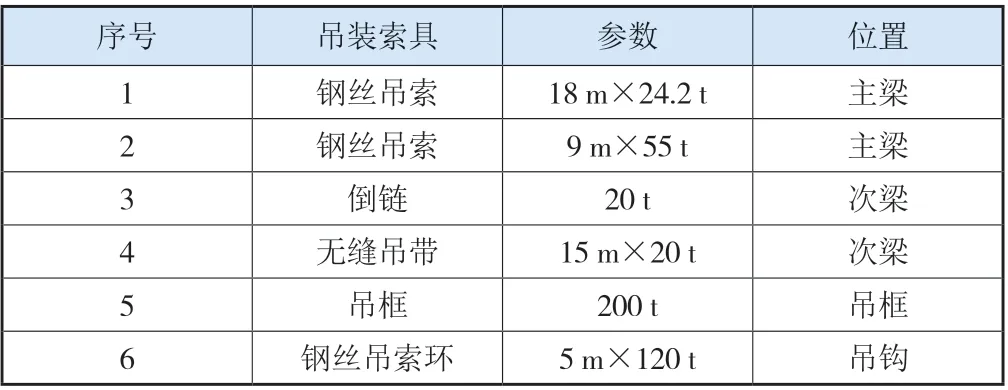
表1 吊装索具
按照先主梁后次梁的顺序连接吊耳与吊索,次梁处使用倒链作为可调节吊索。由于吊点和吊索过多,故上方通过八边形吊框与履带吊吊钩连接,保证受力分配均匀。
4.4 吊装安装
首先在平台中心位置安装激光靶,同时在吸热塔内部地面对应中心位置安装激光垂准仪,然后吊装钢桁架平台至吸热塔上方并调整平台中心位置,直至激光打在标靶中心,确定中心位置一致后,方可缓慢落吊(图4)。

图4 激光正中标靶
落吊过程中使用缆风绳牵引控制平台的转动直至辐射梁与门架位置一一对应,然后使平台缓慢就位,同时保证每个门架均穿过每榀辐射梁的2片钢桁架间的空隙。由于施工安装误差的影响,需要微调门架顶端中线位置,辅助平台落定(图5)。

图5 平台下落安装示意
由于本工程滑模钢平台采用多索吊装,在吊装的过程中,如果全部使用固定长度的吊索,吊索受力会不均匀。另外,根据设计方案要求,在平台就位时,必须保证滑模钢平台4个角点与吸热塔结构4个吊点法向重叠,将采用先粗略就位、后倒链微调法进行二次精确就位。可以使用倒链拉动平台四角进行上下升降,使门架与桁架的固定连接可多次调整校正。通过倒链将门架顶端与两侧牛腿支撑连接,调整两侧倒链长度直至门架位置与钢桁架间隙契合。倒链安装如图6所示。

图6 倒链安装示意
2片钢桁架间隙宽度仅85 mm,门架腿宽80 mm,安装精度要求极高。为了提高安装容错率并降低吊装难度,在门架腿顶端插入梯形导向装置。梯形导向装置下部宽度与门架两腿同宽,均为80 mm,顶部宽度仅30 mm,目的为方便辐射梁与门架穿插(图7)。

图7 导向装置作用原理示意
落吊就位时,首先放松次梁上的吊索倒链,使平台四角略低于主梁,先与门架接触。按照先次梁、后主梁的顺序完成钢桁架平台与门架的连接。
5 结语
以国外某光热光伏发电项目150 t钢平台于51 m高空整体吊装安装施工为例,介绍了一种针对高空大型钢平台整体吊装安装的施工方法。与分段吊装安装相比,具有工期效益显著、施工过程简便、施工成本较低等优势,对今后类似工程施工具有借鉴意义。
