基于协同观测器的永磁同步电机无传感控制*
2021-12-17王晓东钱思琪杨桃桃
王晓东, 马 强, 钱思琪, 杨桃桃
(1.湖北文理学院 纯电动汽车动力系统设计与测试湖北省重点实验室,湖北 襄阳 441053;2.中克骆瑞新能源科技有限公司,湖北 襄阳 441116)
0 引 言
永磁同步电机(PMSM)无传感器控制技术通过实时检测电机绕组中的电信号,利用反电动势实现电机转子位置及速度的估算,常用的基于反电动势的模型方法有滑模观测器[1]、模型参考自适应[2]和扰动观测器[3]等。滑模观测器具有抗扰动强、鲁棒性好、对参数变化和外部干扰不敏感的优点,广泛应用于PMSM无传感控制中[4-5],但传统的滑模观测器存在明显的抖振问题。祝新阳等[6]设计了全阶滑模观测器,采用Sigmoid作为切换函数,引入模糊控制柔化控制信号,有效降低了抖振。周贝贝等[7]提出一种基于幂次趋近律的滑模观测器,选择合适的幂次趋近律指数值能有效地削弱抖振。王国平等[8]在传统指数趋近律的基础上设计了增益随系统状态自适应变化的滑模控制律,抖振抑制效果明显,提高了系统稳定性。申永鹏等[9]设计了扩展滑模观测器,将扩展反电动势估算值反馈至定子电流观测环节,采用sat函数代替传统的sign函数,有效地改善了抖振现象。
本文提出了一种协同观测器方法用来完成PMSM的无传感控制。结合PMSM的离散数学模型和电流偏差函数关系建立观测器系统,并引入角度补偿提高观测精度。通过改变电机的转动惯量参数,实现扰动的加入。仿真验证了协同观测器不存在抖振且具备良好的抗干扰性能,保证了系统估计的准确性。
1 PMSM离散数学模型
PMSM在两相静止α-β坐标系下的电压方程为
(1)

(2)
式中:uα、uβ为α-β坐标系下的定子电压;iα、iβ为α-β坐标系下的定子电流;Rs为定子电阻;Ls为定子等效电感;eα、eβ为α-β坐标系下的反电动势;Ψf为永磁体磁链;θ为转子位置角;ωe为转子角速度。
将式(1)的电压方程改写为电流状态方程形式:

(3)
式中:p为PMSM极对数;ωm为转子机械角速度。
对式(3)进行离散化处理,可得:
(4)
2 协同观测器的设计
根据对PMSM数学模型的分析,设计基于协同观测器的无传感器矢量控制系统,连接观测系统与估计系统的输入输出信号,实时观测调整估计系统的内部状态,重构观测系统[10]。则协同观测器可定义为

(5)
式中:A、B、C为系数矩阵。
电流实际值与观测值误差矩阵Sk为

(6)
参考龙伯格观测器的设计过程[11]和协同控制器的收敛证明过程[12],合理定义增益矩阵G和速度收敛矩阵T:

(7)
结合式(4)和式(5)可得协同观测器的数学模型为
(8)

根据式(2)可通过反正切函数获得转子位置信息,即:

(9)
在无传感控制过程中得到的反电动势估计值会含有高频信号分量,基于反正切函数的转子位置估计方法会放大这一误差,从而影响系统的控制性能[13]。因此,需要加入角度补偿[14]:

(10)
式中:ωc为低通滤波器的截止频率。
为获得转速信息,将式(10)进行求微分运算。对于表贴式三相PMSM,此时转速估计值的表达式为
(11)
3 仿真与分析
基于MATLAB/Simulink搭建PMSM无传感控制的仿真模型,如图1所示。仿真相关参数如表1所示。

图1 基于协同观测器的PMSM无传感控制系统
为验证协同观测器的速度突变性能,设置初始转速为600 r/min,0.03 s时加速至1 000 r/min,0.06 s时减速至800 r/min。结果如图2~图4所示,分别为转速估计波形、转速估计误差波形、位置估计误差波形。由图2可知,电机加减速阶段,传统滑模观测器波形整体抖动明显且线条较粗,而协同观测器的波形基本无抖动幅度较小且线条较细。由图3和图4可知,传统滑模观测器的转速估算误差范围为-20~20 r/min及位置估算最大误差约为0.05 rad,且波形线条较粗。协同观测器的转速估算误差范围为-0.1~0.2 r/min及位置估算最大误差约为0.03 rad,且波形线条较细。
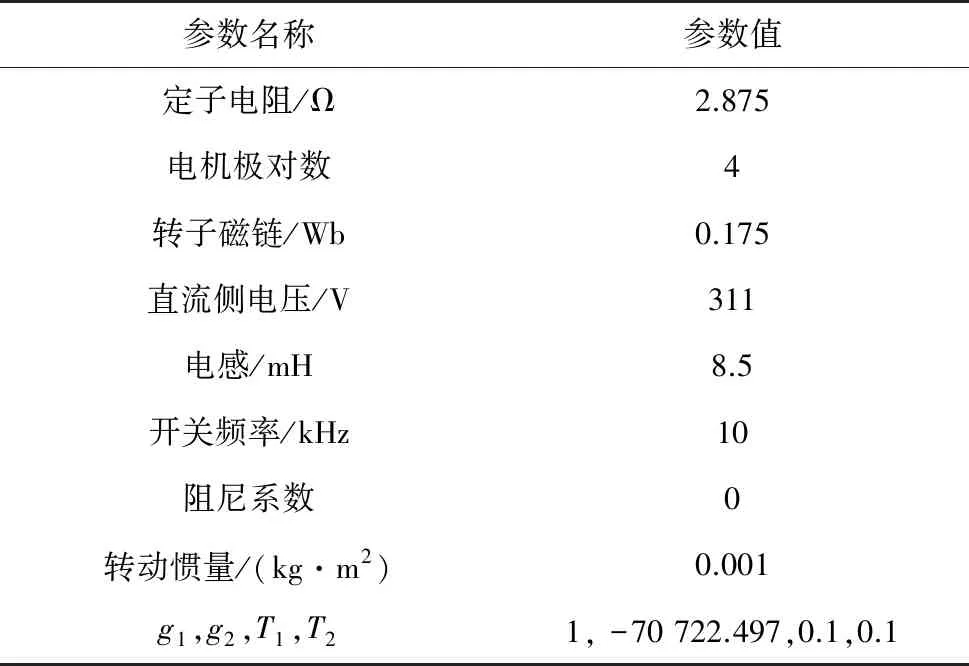
表1 电机仿真参数
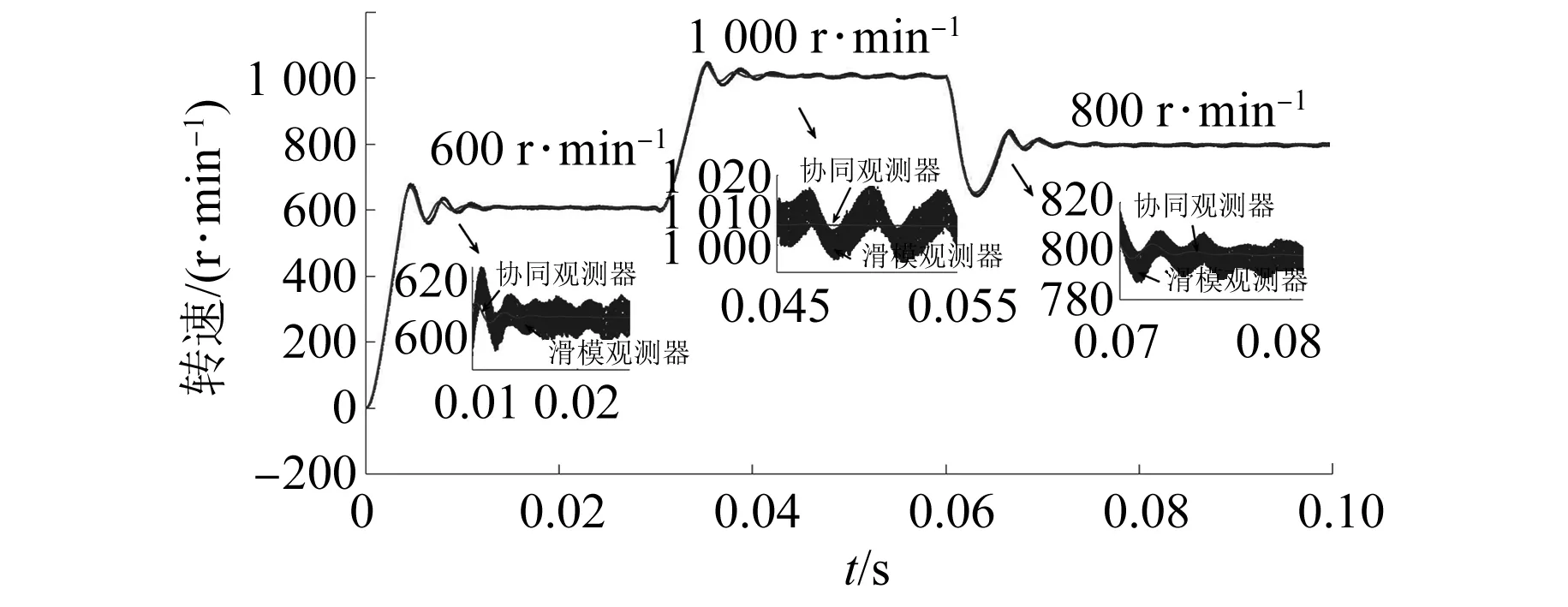
图2 转速估计波形

图3 转速估计误差波形

图4 位置估计误差波形
为验证协同观测器的负载突变性能,设置0.03 s时加载5 N·m,0.06 s时加载至10 N·m。结果如图5所示,在不同的转速阶段施加不同的负载,传统滑模观测器的转矩波形抖动明显,而协同观测器的转矩波形较平滑稳定。

图5 电机转矩波形
为验证协同观测器对参数变化的抗干扰性能,改变转动惯量。50%J变化下的电机转矩波形、100%J变化下的电机转矩波形结果如图6和图7所示,由图6和图7可知,当电机转动惯量发生变化时,协同观测器方法下的转矩波动幅度小、稳态响应时间短。特别是转动惯量降低时,该方法比滑模观测器优势明显。

图6 50%J变化下的电机转矩波形

图7 100%J变化下的电机转矩波形
由图2~图7分析可知,协同观测器相对滑模观测器无抖振现象,电机转子位置及转速的估算精度提高,对参数变化引起的干扰抵抗更强。
4 结 语
本文提出了一种协同观测器方法用于PMSM的无传感控制。通过对PMSM进行转速突变、负载突变和参数变化干扰,仿真验证所设计的协同观测器不存在抖振的问题,并且比传统的滑模观测器得到更精确的位置及转速估计信息,抗参数变化干扰能力更强,能够实现较好的PMSM无传感控制效果。
