步进电机S曲线精确控制的研究与验证
2021-12-17宋建国韩鹏杰
宋建国, 韩鹏杰, 卢 意
(北京工业大学 信息学部,北京 100000)
0 引 言
随着生产自动化程度的提高,流水线生产作业也越来越普遍,驱动其运动的电机在预设时间到达预设位置且运行平滑准确是流水线作业的核心,即定时间运行定距离,其主要要求是力矩足够,运行时间和距离精确且一般行程较短。步进电机以其控制简单,价格低廉,无累计误差精度较高等优势广泛用于电机控制生产领域。但步进电机自身存在精度误差,电机起动时可能产生低频共振,起动停止速度突变时容易造成失步越步等,这些均会使系统最终运动效果不理想,使估计预设运动时间和预设运动距离不匹配,因此开环下合理规划电机运动过程使其运动过程平稳是能够精确控制电机的先决条件,通常设计加减速曲线将电机起动运行停止过程进行平滑控制,常用梯形、S型、指数型3种变速曲线进行变速控制,保证电机平稳运行。现阶段对于变速曲线研究应用主要侧重于平稳性,对于运动过程的时间距离准确性没有过多研究,但在实际应用中往往需要同时考虑运动平稳性和时间距离准确性。因此,本文针对于要求步进电机固定距离精确起停的情况进行系统设计,通过分析对比3种加速曲线[1],选用S型加速曲线符合本设计要求,对比分析多种S曲线函数,提出了新型余弦S曲线,对于S变速阶段实际运动距离难以计算的问题提出了解决方案,结合本设计要求,搭建控制模型进行仿真分析,搭建硬件测试平台实践验证,验证了控制算法的合理性,通过简单的参数设置,本设计可以满足要求步进电机固定距离精确起停的工况。
1 变速曲线的选取分析
1.1 步进电机矩频特性分析
步进电机以脉冲频率为控制信号,一个脉冲驱动电机行进一个步距角,理想条件下电机转动速度与驱动脉冲频率成正比,因此脉冲频率等效于电机速度,运行脉冲数量等效于运行距离。输出转矩随频率上升而下降,构建步进电机动力学模型[2]为

(1)
式中:θ为运行角度;J为转动惯量和负载惯量之和;B为机械阻尼、电磁阻尼等系数之和;K为系统弹性系数;T为电机生成总力矩;Ta、TL为电机加速转矩、负载转矩;Tf为电机摩擦和其他无关阻力矩。
角度转速加速度之间关系为

(2)
式中:ω为运行转速;ε为运行加速度。
忽略系统弹性系数项联立式(1)和式(2)进行微分方程求解,得到转矩加速度关系:

(3)
式中:T0为电机初始转矩。
由于电机起动阶段惯性扭矩较大,加速转矩较小[3],随着驱动频率上升两相混合式步进电机绕组电感形成的反向电动势逐渐增大,涡流损耗逐渐增加,电机输出力矩变小。根据矩频图像与式(3)结合分析得到近似频率加速度图像。
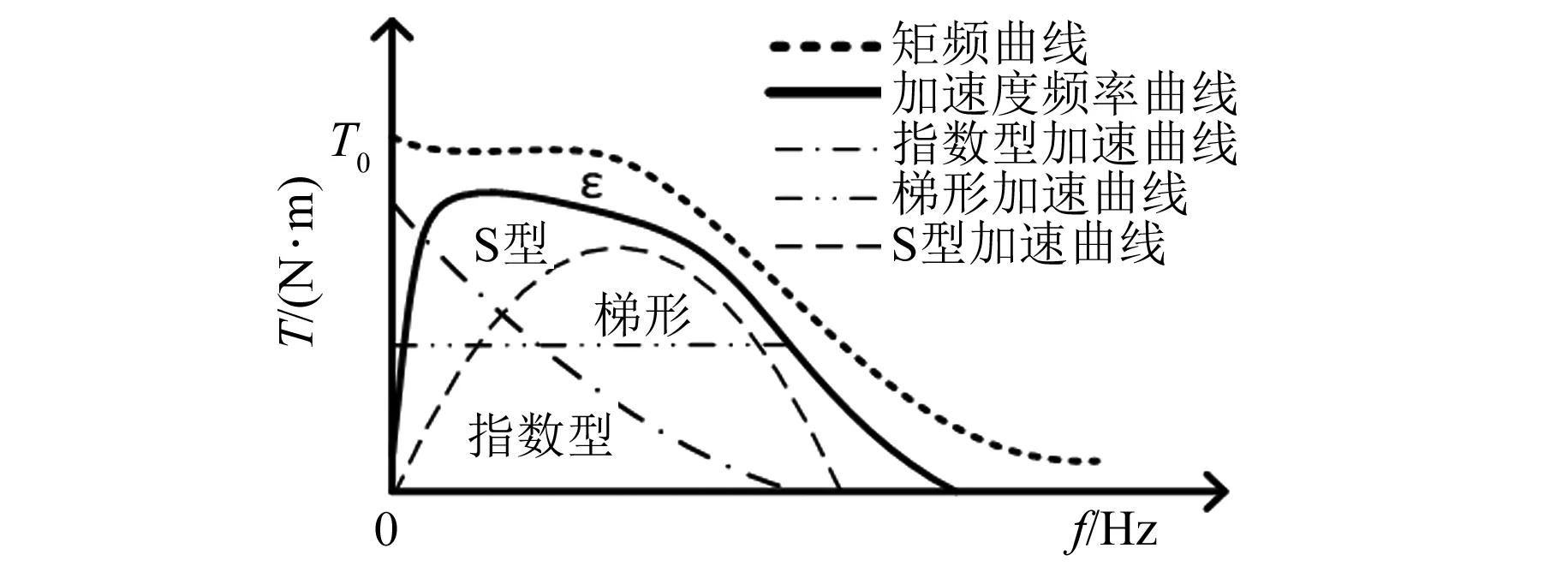
图1 加速频率特性曲线
电机负载力矩与其他阻力矩一定的情况下,由图1可知起动阶段电机提供的最大加速度很小,随着频率上升电机输出的加速力矩,即能提供的电机升速的最大加速度逐渐下降,图像与矩频曲线相似,加速曲线加速度变化应符合上述曲线规律,实时曲线加速度应不超过电机提供的最大加速度,才能在提高加速效率的同时保证电机运行的平稳准确性。图1显示了3种加速曲线运行加速度情况,对比分析可知S曲线最符合电机加速度频率曲线规律,起动阶段加速度逐渐上升,避免起动阶段加速力矩过小造成失步,减速时S曲线速度平滑到0避免由于急停惯性过大导致对系统冲击过大和越步。对于本设计要求的精确起停,选用S型加速曲线最为合适。
1.2 S曲线分析及选型
S曲线常选用三角、Sigmoid和Bezier函数进行拟合,函数原型如表1所示。

表1 3种S曲线函数原型
3种函数生成的S曲线图像相似,区别在于运算量、准确度和复杂度。Sigmoid函数由于其函数特性,容易出现加速不完全的情况,导致最终速度小于预设速度;Bezier曲线函数不同情况下变形较繁琐,移植性差;三角函数结构简单,运算量一般且变速结果准确。因此最终选用三角函数设计S曲线。上述函数运用到步进电机变速过程均需要进行变换,转化成脉冲数/频率关系方便程序编写和移植。
2 余弦S曲线模型设计与仿真
2.1 变速曲线理论推导
对三角余弦函数进行变换处理,建立电机脉冲频率和时间的关系式:

(4)
式中:fa为实时加速脉冲频率;fmax为运行最高频率;ts为加速时间。
式(5)、式(6)分别为匀速和减速段频率与时间关系式:
fc=fmax,ts≤t≤tc+ts
(5)
tc+ts≤t≤tt
(6)
式中:tt为总时间;tc为匀速时间。
以式(4)~式(6)规划全路径过程为S加速—匀速—S减速,加减速时间相等皆为ts。对脉冲频率积分处理得到运行时间与脉冲数量(运行距离)n的关系式:

(7)
联立式(4)~式(7)得到运动最大频率:

(8)
总时间:
tt=2ts+tc
(9)
2.2 余弦S曲线仿真模型搭建
根据上节推导在MATLAB/Simulink中进行模型搭建,考虑到实际运行情况应对曲线离散化处理即进行等时间分割,对于步进电机控制驱动芯片接受的脉冲频率即控制速度,在不同离散时间段通过S曲线计算脉冲频率,变换分割时间根据芯片计算能力和电机特性选取,本设计选用1 ms作为分割时间。运动开始电机以0速起动进行S曲线加速运动,运动到预设速度进行匀速运动,最后通过S曲线减速到0,其中减速段可经过加速段翻转平移得到,在合理规划下整个运动过程能够平滑起停。

图2 离散规划运动过程
搭建S曲线仿真模型:

图3 曲线仿真模型
模型设置入口参数设定运动距离、时间和匀速时间,在实际情况下每个分割时间段脉冲数只能为整数且时间段内选用非连续频率积分最终导致脉冲数与实际要求不等,造成运动位置不准确,必须设计补偿模块二次规划使最终运动距离等于预设距离。曲线规划补偿部分是整个控制部分核心,通过M语言在函数模块中实现,通过控制最高脉冲频率大小实现粗调、削减运行时间实现微调。补偿模块以2.1节推导式(4)~式(6)为基础,建立脉冲数量与脉冲频率的关系式:
nx(t)=fx(t)·TS,x=a、c、d
(10)
式中:TS为分割时间,na、nc、nd分别为加速匀速减速段脉冲数。
计算每个时间段运行脉冲数量n,考虑实际情况,时间段内运行脉冲数必须为整,以加速段举例:
na=[fa(i·TS)·TS](0≤i≤ia)
(11)
其中,ia为加速段分割数目:

(12)
(13)
(14)
式中:id、ic分别为减速和匀速段分割数目;iall为总分割数目。
计算总运行脉冲数量N:

(15)
预设条件代入初次计算N,小于预设距离所需脉冲数,开始进行补偿运算,频率粗调阶段根据式(8)补偿预设脉冲数量改变最高脉冲频率,抬高每阶段发送脉冲数使N逼近预设脉冲数。图4对不同补偿过程曲线实时发送脉冲数进行比较,可看到粗调后比规划前最高脉冲数图像上移,微调后图像左移。图5显示粗调后实际距离与预设距离仍存在微小误差,但确定了新的脉冲数,在预设距离临界值有上下2种补偿脉冲数,代表多次补偿的前一阶段和后一阶段,选择接近临界值的情况时间微调,改变匀速时间段或末段使实际距离等于预设距离,得到新的各段运动时间。在上述运动距离和各段运动时间条件下代入运行模块按照上式计算各段脉冲频率最终实现距离时间精确运行。

图4 不同规划段实时发送脉冲数对比
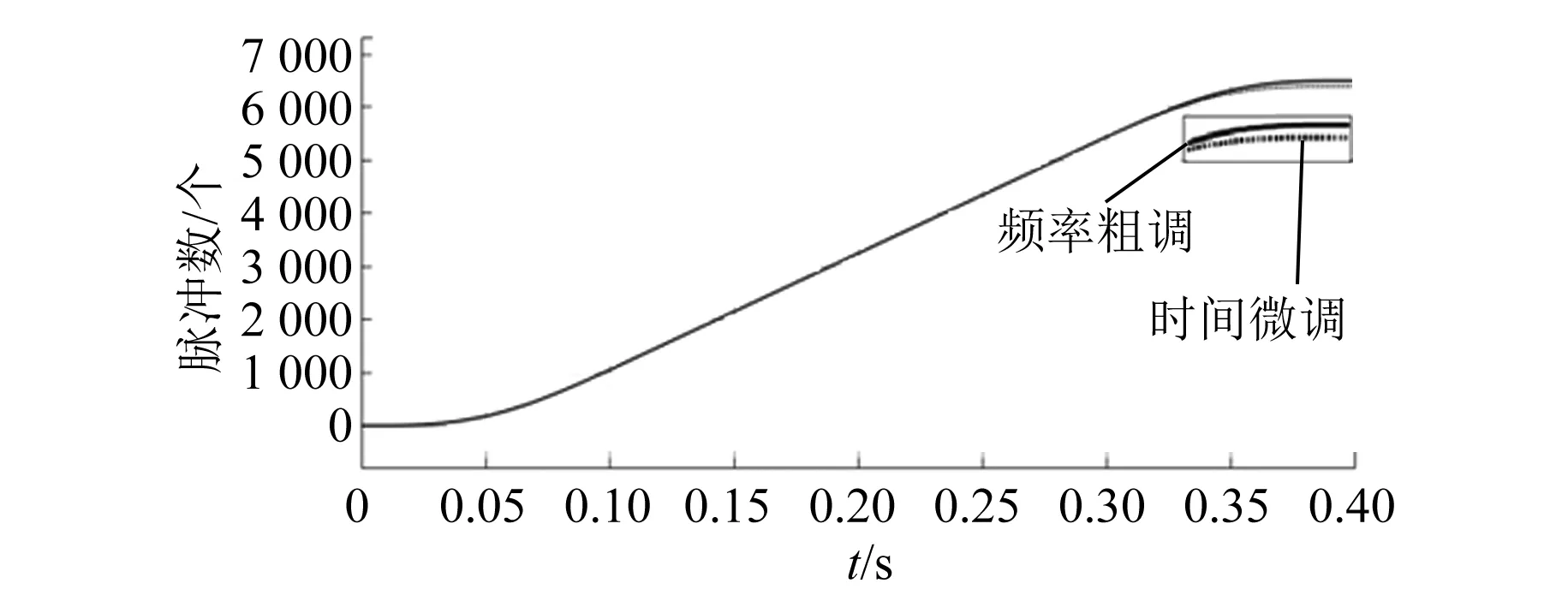
图5 粗调、微调后位移曲线对比
利用搭建模型进行仿真,仿真结果数据如表2所示。
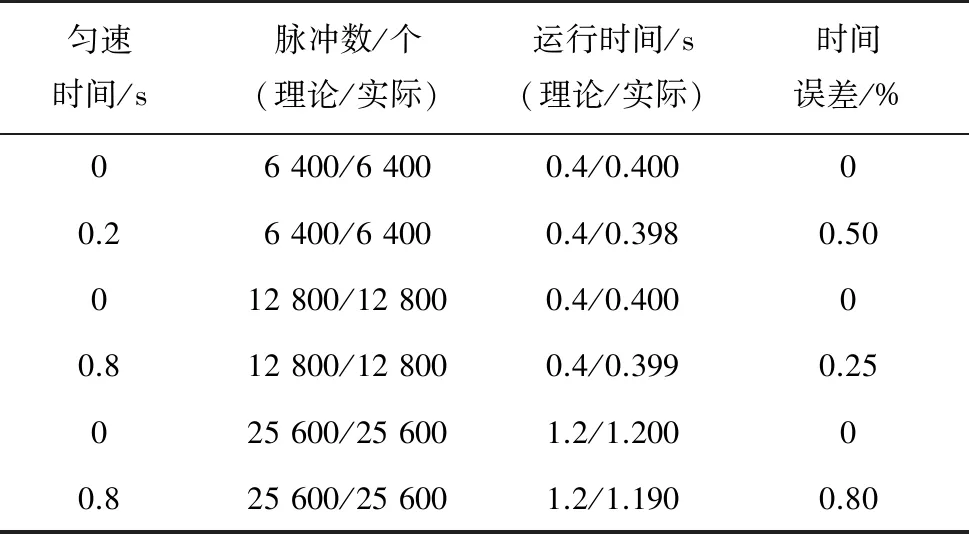
表2 仿真结果数据表
仿真条件下结果显示运行时间和距离精度很高,且无匀速情况下时间误差更小。
2.3 运动过程时间分配分析
同一运动中,给定时间tt中匀速和变速段时间的占比直接影响最终运动效果和适用范围,对总时间tt的分配问题进行分析讨论,匀速和变速段时间分配逻辑关系如图6所示。
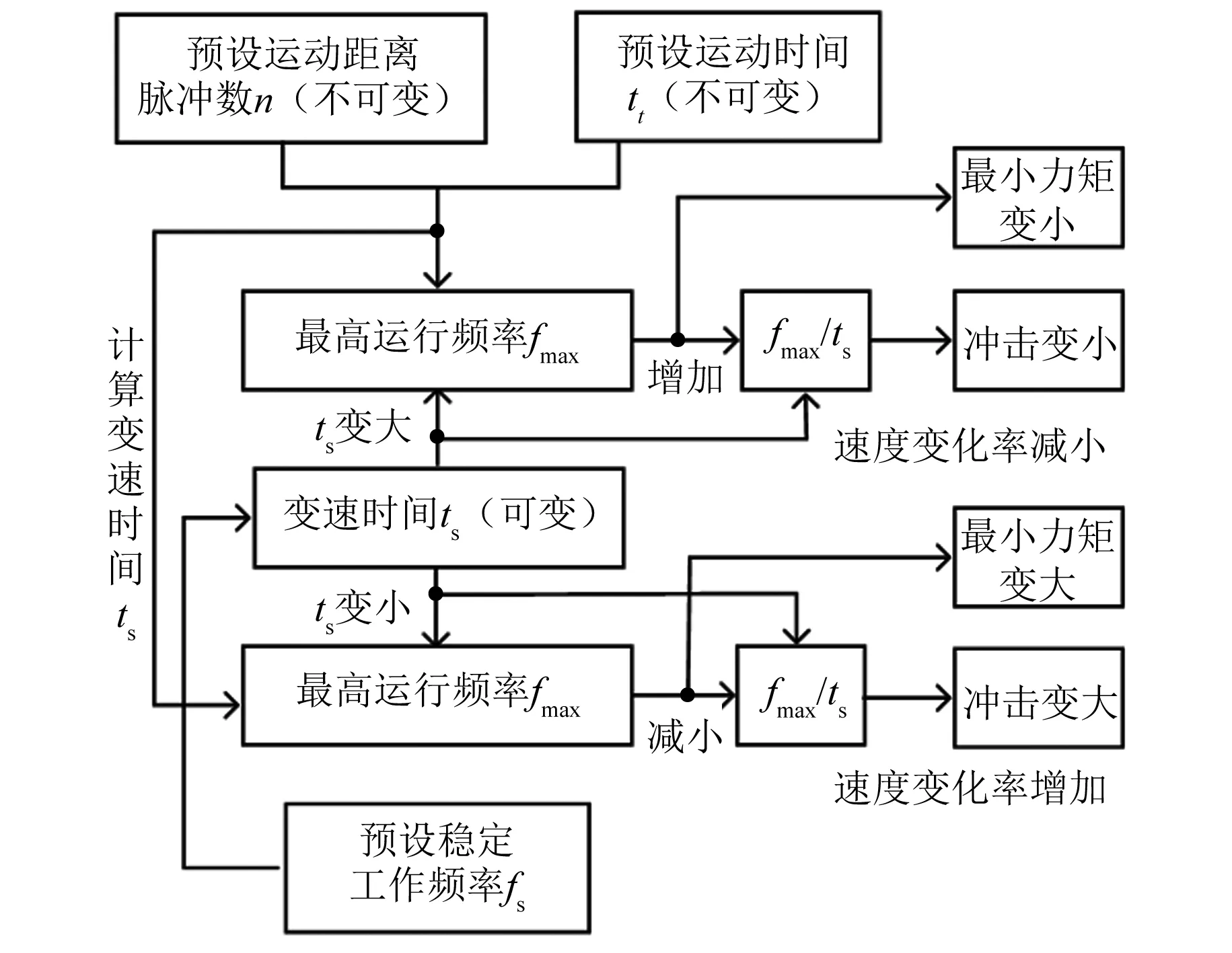
图6 时间分配逻辑关系图
由以上可知ts的变化影响电机的运行平稳性和带载能力,最高频率太大会削减高速段运动力矩。在行进距离较短的应用场合,电机运行转速远小于最高转速且通过S曲线加速能到达的实际转速大于电机额定转速,在负载力矩有保证不失步前提下可以考虑去除匀速段,在电机负载大的情况下应减少变速时间。通过预设稳定工作频率fs(不大于fs的情况下保证力矩足够)结合式(8)辅助确定ts的最大值,能够保证运行效果。
为了验证上述理论推导的正确性和合理性,预设0.4 s运行6 400脉冲,利用2.2节搭建模型对无匀速和0.2 s匀速2种情况进行仿真对比,图7显示出无匀速较有匀速情况最高频率更大,力矩更小,图8通过加速度、位移曲线对比显示出无匀速条件下最高加速度更小,位移运动更加平滑。
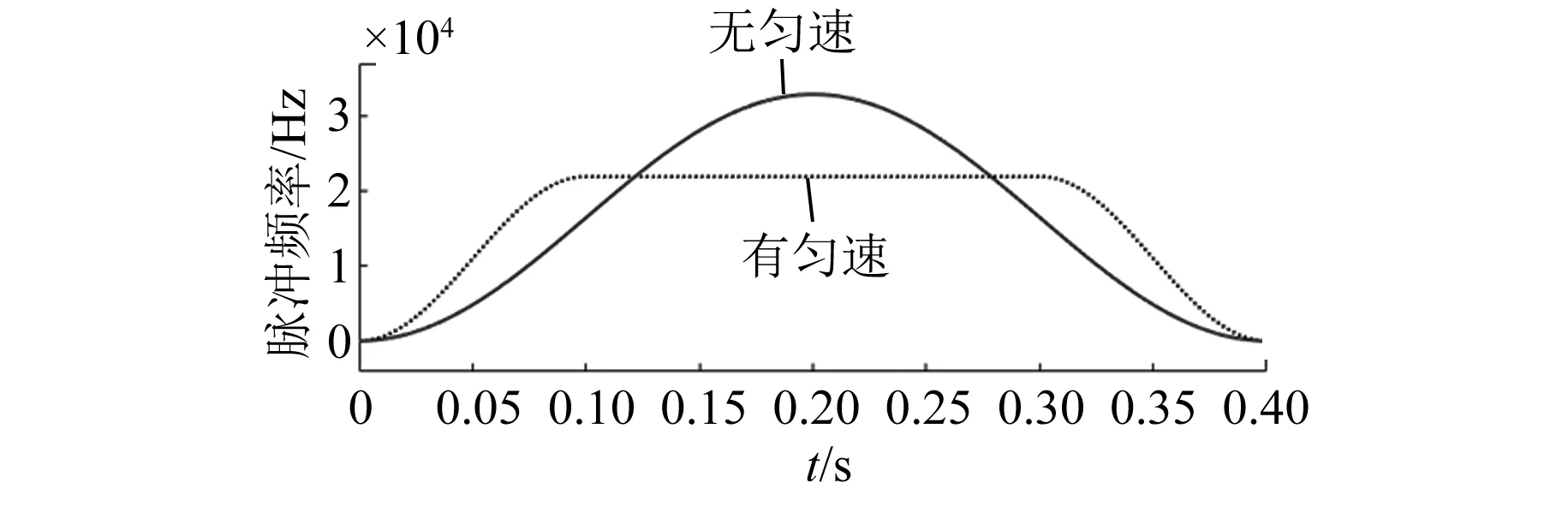
图7 不同匀速时间仿真频率对比

图8 不同匀速时间仿真加速度/位移对比
3 硬件测试与结果分析
3.1 硬件选型
为了验证控制算法的合理性,选择加装角度传感器的步进电机对设计的算法进行测试验证,选用STM32F042F6P6作为主控芯片,AS5600磁编码器采集角度信息,A3979驱动芯片驱动电机,主控芯片通过CAN实现与Labveiw搭建的上位机通信,测试电机选择两相混合式步进电机。

表3 电机参数表
3.2 硬件测试平台搭建
以3.1选型器件搭建硬件测试平台。测试平台框图和硬件实物图分别如图9、图10所示。

图9 测试平台框图

图10 硬件实物图
为了便于程序编写,将推导的时间/频率关系转换成脉冲数/频率关系,生成的脉冲数/频率关系固化在ROM中,运行时通过查表法读取装载值[4],减少CPU运行时间,提升响应速度。
3.3 试验结果及分析
驱动芯片16细分下驱动选型电机,电机稳定工作频率为19 200 Hz,运行1周需3 200个脉冲驱动,预设0.4 s运行1周,上述值代入式(8)计算出稳定最大变速时间为0.23 s,设定变速时间0.2 s。脉冲数/频率生成部分数据如表4所示。

表4 脉冲数/频率数据表
由表4知最大频率11 413 Hz远小于稳定工作频率,从脉冲频率变化规律可以看出曲线平滑启停且基本对称。以上述数据进行路径规划,采集输出脉冲频率变化波形,如图11所示。

图11 脉冲频率输出波形
每5 ms读取1次AS5600磁编码器角度寄存器,其转动1周输出范围为0~4 095,将角度信息经过求导变换得到速度,经过累加变换得到位置,经CAN通信将位置信息发送到上位机,得到实时位置曲线,如图12所示。
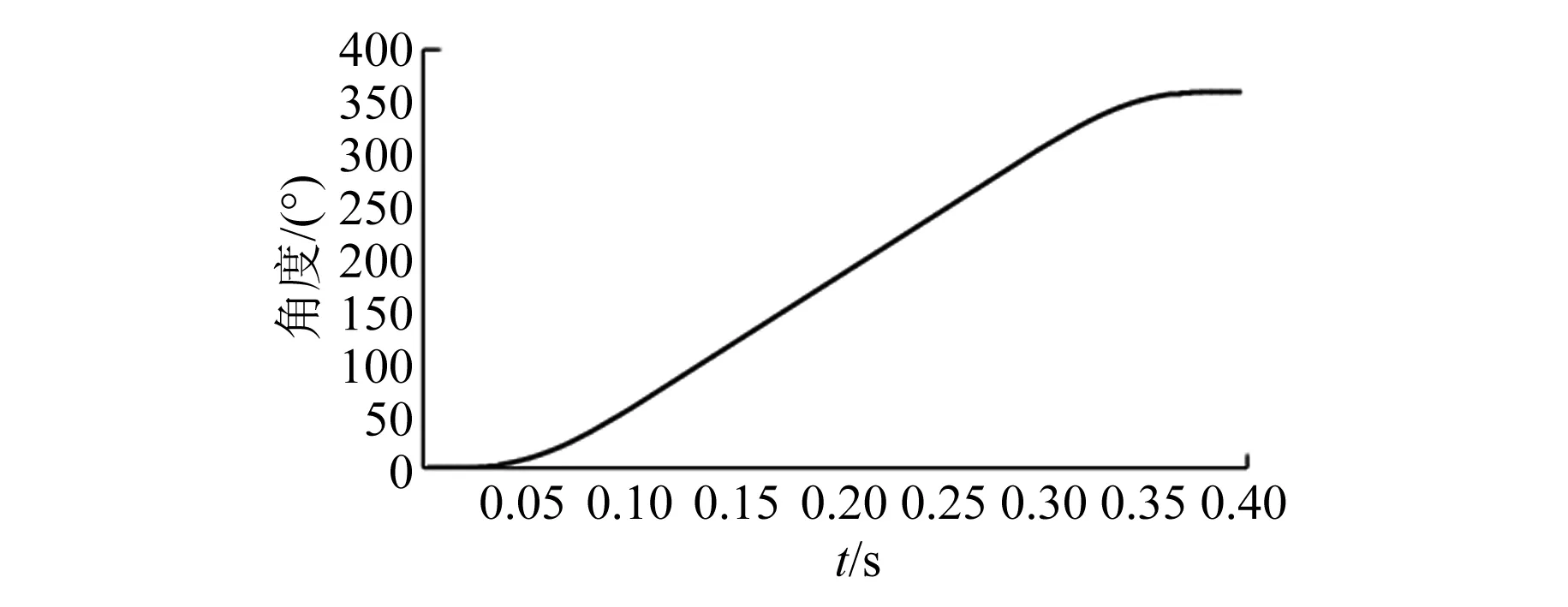
图12 步进电机位置曲线
多次改变初始设定参数,选用不同运动策略试验,对运动效果进行分析比较,如表5所示。

表5 运动效果对比
对上述结果分析,证明采用余弦S曲线进行路径优化,较优化前运行稳定性和准确度均有明显提升,可以实现电机在预设时间和距离里准确起停,符合设计要求。
4 结 语
本文通过理论分析、仿真模拟、硬件验证设计余弦S变速曲线控制算法,不仅可以应用于常见的优化步进电机起停运动,而且针对于较少研究的步进电机曲线运动距离时间控制策略,设计控制算法能够对时间距离准确控制,只需设定运动距离、运动时间、变速时间即可规划整个运动过程,最终实现在满足运动距离情况下运动时间误差小于1.5%,满足大部分应用场景。且曲线在不同负载情况可以灵活判定调节,参数设定简单移植方便,有广泛的应用场景和较高的实用价值,已在全自动号码机项目中实现应用。
