基于激光跟踪仪的协作机器人精度测量技术研究
2021-12-17付敏郭隆臻唐恒飞程伟伦孙浩
付敏,郭隆臻,唐恒飞,程伟伦,孙浩
(上海工程技术大学 机械与汽车工程学院,上海 201620)
0 引言
协作机器人是一种新型的工业机器人,通过机器人与人协同作战,可以发挥机器人的效率和人的智慧,具有轻量化、友好性、感知能力、人机协作等优点。激光跟踪仪是大尺度空间测量中精度最高和最重要的工业科学仪器,是唯一同时具有μm 级别精度、百米工作空间的高性能光电仪器,具有精度高、实时快速、动态测量、操作简单等特点,可用于测量、定位和校准。
陈刚等介绍了激光跟踪仪的组成、原理和种类,以及对工业机器人进行性能测试的方法和过程[1];李新等利用Leica 激光跟踪仪对一种工业机器人进行了现场标定,并验证了方法的有效性[2];乔贵方等提出了一种融合的串联机器人标定系统的坐标系快速转换方法,提高了转换精度和测试效率[3];孙大林等设计了一种主动式靶标装置和精度优化方法,可以提高机器人关节的被测范围和定位精度[4];任瑜等提出了以机器人末端的4 个参考点来间接测量绝对位姿的方法,无需特殊的机械工装,具有良好通用性[5];贺惠农等对机器人建立了一套统一的测试方法,可以将绝对定位精度提升一个数量级[6]。
以上关于激光跟踪仪精度测量和标定的研究大多是针对传统工业机器人进行,而本文针对AUBOi5 协作机器人,建立DH 参数模型,设计了测量方法,并利用FARO 激光跟踪仪进行位姿、距离、轨迹、稳定性等方面的性能测量,计算其准确度和重复性,并对AUBO-i5 协作机器人的整体性能进行评价。
1 AUBO-i5 协作机器人简介以及DH 参数模型建立
1.1 AUBO-i5 机器人基本结构
AUBO-i5 协作机器人具有6 个自由度,并且末端位置和姿态存在解耦关系,其实物模型如图1 所示。

图1 AUBO-I5 实物图Fig.1 AUBO-I5 physical map
1.2 确定DH 参数模型
利用改进DH 参数建模方法确定AUBO-i5 机器人的DH 参数,即将连杆坐标系建立在连杆的驱动轴上,建立改进DH 连杆坐标系如图2 所示。

图2 AUBO-I5 机器人DH 连杆坐标系Fig.2 AUBO-I5 robot DH linkage coordinate system
根据图2 所示机器人的位置,确定DH 参数,见表1。

表1 AUBO-I5 机器人DH 参数Tab.1 AUBO-I5 robot DH parameters
2 测量方法
测量方法主要是针对协作机器人在操作过程中的位姿、距离、轨迹误差以及稳定性4 个方面进行测量。
2.1 位姿特征测量
在控制器的指令下,让协作机器人的机械臂的末端到达某一特定的位置,此时规定的点是“指令位姿”;机械臂在行进的过程中,由于受到某些因素的影响,从而到达一个实际的位置,此时的点是“实到位姿”。“实到位姿”与“指令位姿”之间将会出现一些误差,这些误差会使协作机器人的操作精度大大降低。要提高操作的准确度,主要是从提高位姿准确度和位姿重复性两个方面去考虑。
2.1.1 位姿准确度
位姿准确度表示指令位姿与从同一方向接近该指令位姿的实到位姿平均值之间的偏差[7]。以机器人基座为坐标原点,建立坐标系,如图3 所示。
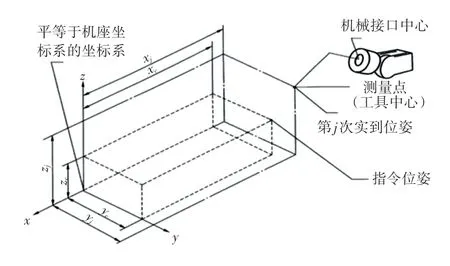
图3 指令位姿与实到位姿关系Fig.3 The relationship between command pose and actual pose
利用图3 中坐标系计算位置准确度,公式(1)如下:
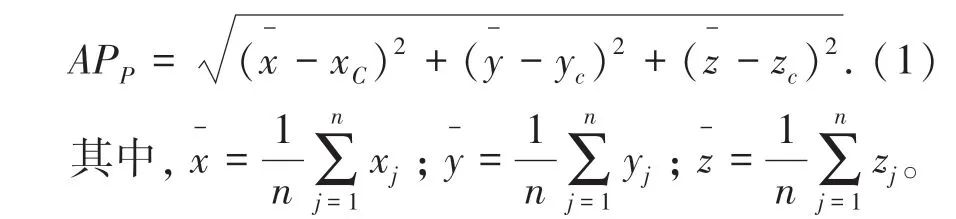
位置和姿态的准确度和重复性如图4 和图5 所示。

图4 位置准确度和重复性Fig.4 Position accuracy and repeatability
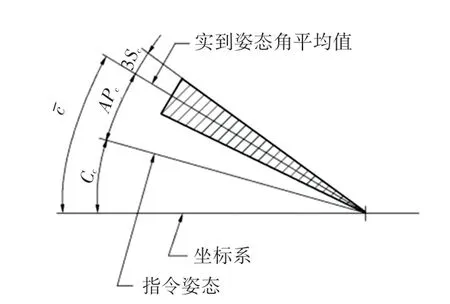
图5 姿态准确度和重复性Fig.5 Attitude accuracy and repeatability
利用图3 中坐标系计算姿态准确度,公式(2)如下:

2.1.2 位姿重复性
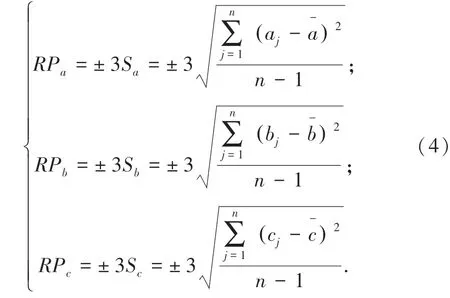
位姿重复性是指同一指令位姿从同一方向重复n次后实到位姿的一致程度[7]。通过公式(3)和公式(4)来计算。
位置重复性:

姿态重复性:
2.2 距离特征测量
距离特性主要包括距离准确度和距离重复性。二者是由2 个指令位姿与2 组实到位姿均值之间的距离偏差和在2 个位姿之间一系列重复移动的距离波动来确定。距离准确度是指令距离和实到距离平均值之间的位置与姿态的偏差[7]。通过设计公式(5)来降低误差,提高准确度。

xc1、yc1、zc1是Pc1的坐标;xc2、yc2、zc2是Pc2的坐标;x1j、y1j、z1j是P1j的坐标;x2j、y2j、z2j是P2j的坐标。
距离重复性表示同一方向对相同指令距离重复运动n次后实到距离的一致程度[7]。通过给出的指定距离,可以利用公式(6)算出距离重复性。

2.3 轨迹特征测量
协作机器人编程指令遵照一定的轨迹,从一个点到达另一个点,由于某些因素的影响,总会使轨迹出现少许偏差。一般从轨迹准确度和轨迹重复性方向去考虑。轨迹准确度指机器人在同一方向上沿指令轨迹n次移动其机械接口的能力[7]。而轨迹准确度是由位置轨迹准确度所决定,位置轨迹准确度为指令轨迹中一些(m个)计算点与n次测量的集群中心G1 间的距离的最大值[7]。公式(7)计算如下:

轨迹重复性表示机器人在同一指令轨迹下重复n次实到轨迹的一致程度[7]。对于给定的某一条轨迹,跟踪n次,用公式(8)计算出轨迹重复性。
2.4 稳定性测量
机器人停在实到位姿快慢程度的性能即体现了稳定性。影响稳定性的因素主要是位置时间和位置超调量。位置时间是指机器人第一次进入门限带的瞬间到不再超出门限带的瞬间所经历的时间;位置超调量是机器人第一次进入门限带到再出门限带后瞬间位置与实到稳定位置的最大距离[7]。位置超调量的求取公式(9)如下:

其中,OV=maxDij(OV=maxDij >门限值);OV=0(OV=maxDij≤门限值);
式中i表示机器人进入门限带后测量的采样点号。
3 测试实验
本次实验设备有笔记本电脑一台,AUBO-I5 协作机器人一台,激光跟踪仪一台。通过激光跟踪仪对AUBO-I5 机器人进行位姿、距离、轨迹误差以及稳定性测量。利用激光跟踪仪测量值和计算公式,通过MATLAB 软件强大的计算能力,计算出测量的结果。
3.1 测试流程
激光跟踪仪的测试流程如图6 所示。
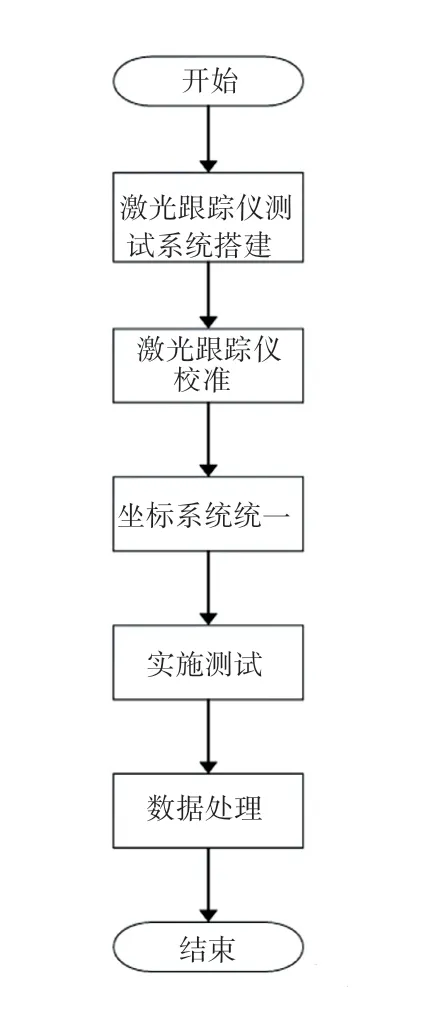
图6 激光跟踪仪测试流程Fig.6 Laser tracker test process
3.1.1 激光跟踪仪系统搭建
在进行测试前,需要将激光跟踪仪安装成功,安装的主要内容包括三脚架打开锁定、跟踪头安装锁紧、跟踪头与控制安装器的连接以及控制器与上位机(PC 电脑)的连接等,如图7 所示。

图7 激光跟踪仪测试系统Fig.7 Laser tracker test system
3.1.2 激光跟踪仪校准
激光跟踪仪安装成功之后,上下位机连接通讯成功,利用FARO 自带的校准软件进行校准,通过对前后视的检查、对角度精度校准,保证激光跟踪仪在测试中保持良好的精度状态。
3.1.3 坐标系统
将机器人的DH 参数输入到激光跟踪仪测试软件中,可得到激光跟踪仪中被测机器人模型,完成建模。在示教器中选取4 个点,分别将机器人移至相应位置,用激光跟踪仪进行测量,得到激光跟踪仪坐标系下的坐标值。通过计算,可得到机器人坐标系与激光跟踪仪坐标系之间的转换矩阵,从而将两坐标系统一起来。
3.1.4 实施测试
依照国家机器人测试标准GB/T 12642,本文实验对位姿准确度和位姿重复性、距离准确度和距离重复性、轨迹准确度和轨迹重复性以及位置稳定时间4 项内容进行测量[7],具体步骤如下:
(1)首先根据不同的测试内容选择机器人速度测试条件以及负载条件,测量位姿内容的测试条件和负载条件;
(2)随机选取5 个测试点,分别为P1,P2,P3,P4,P5,将5 个点的三维坐标通过软件告知控制器。若在位姿测量时,控制器操作机器人依次经过选定的5 个点,并循环经过(P1 →P2 →P3 →P4 →P5 →P1....P5);如果是距离和轨迹的测量实验,可以选择5 个点中的任意两个点,控制器控制机器人从一个点到另一个点,分别进行距离特性参数测量和轨迹特性参数测量;而要是位置稳定性时间测量,只需选取一个点即可,测量位置稳定性参数;
(3)跟踪器自动跟踪3 个或者4 个靶球数据,当循环结束时,停止操作;若没有测试到靶球数据,则延长各个点的停止时间;
(4)测试结束时,将测试数据进行保存,通过EXCAL 表格的形式进行存储。
在实施测试中,不同的测试项目,保存了不同的参数,分别算出各项测试中的评价参数。
3.2 测试结果
3.2.1 位姿特征测试结果
测试结果见表2 和表3。通过分析可得,最大位置偏差为1.933,最小位置偏差为0.209,机器人的平均位置偏差为1.021。APa方向上的姿态准确度最高,APc方向上的姿态准确度最低。

表2 位姿准确度Tab.2 Pose accuracy

表3 位姿重复性Tab.3 Pose repeatability
通过分析可得,最大位置重复偏差为0.055,最小位置重复偏差为0.026,机器人的平均位置重复偏差为0.037。RPb方向上的姿态重复偏差较大,RPa和RPc方向上的姿态重复准确度较高。
3.2.2 距离特征测试结果
距离特征测试结果见表4。P2-P5 的距离准确度最高,P1-P3 的距离重复性最好。其中,P2-P4和P3-P5 的距离准确度小于0,表示实到距离小于指令距离。
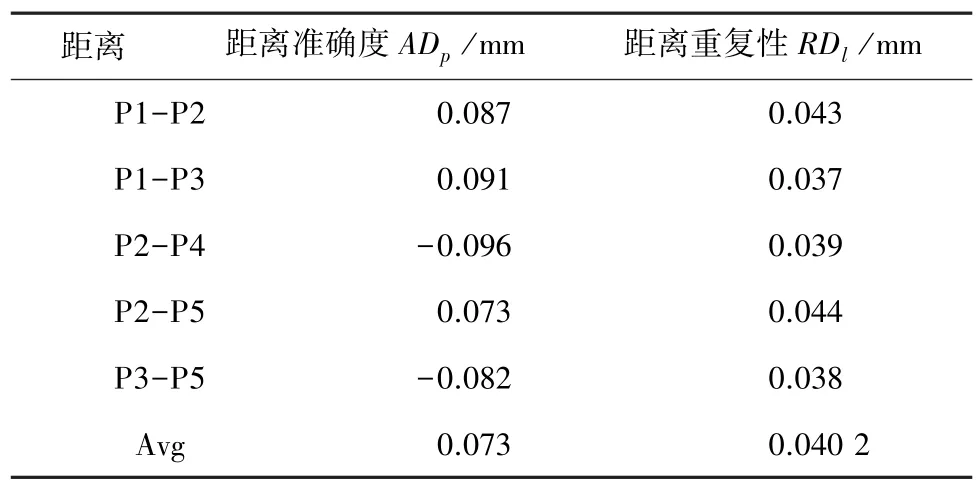
表4 距离准确度和重复性Tab.4 Distance accuracy and repeatability
3.2.3 轨迹特征测试结果
轨迹测试结果见表5。平均轨迹准确度为0.823 8 mm,平均轨迹重复性为0.079 8 mm,轨迹准确度远小于轨迹重复性。
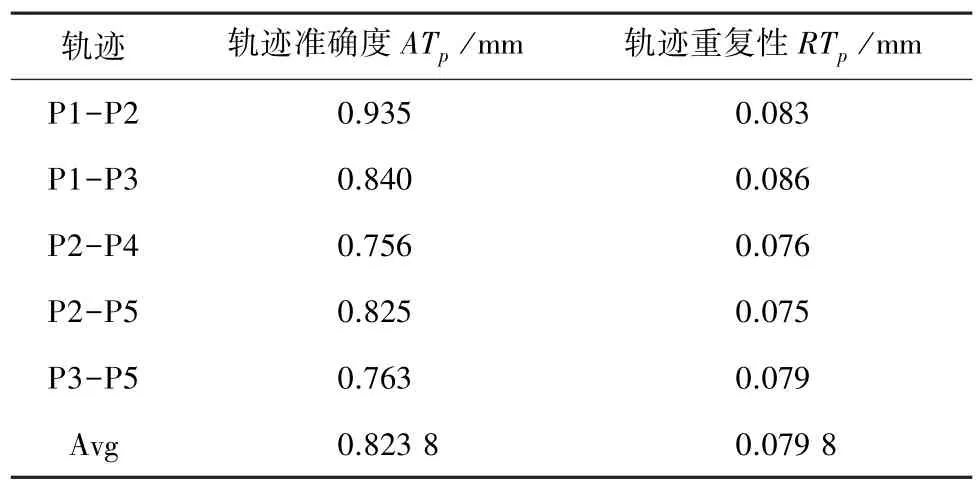
表5 轨迹准确度和重复性Tab.5 Trajectory accuracy and repeatability
3.2.4 稳定性测试结果
选取P1 和P3 点进行测试,结果见表6 和表7。当门限带为0.1 mm时,P1 点稳定时间略小于P3 点稳定时间。

表6 P1 点稳定性Tab.6 P1 point stability
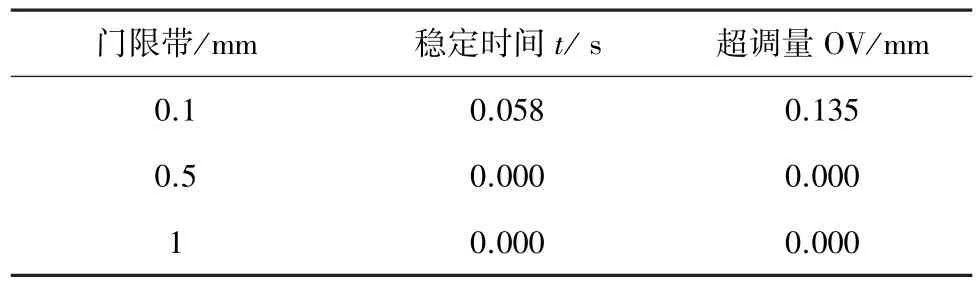
表7 P3 点稳定性Tab.7 P3 point stability
4 结束语
通过对AUBO-I5 协作机器人建立DH 模型,设计精度测量方法,利用激光跟踪仪对AUBO-I5 协作机器人进行测量,得到了该机器人位姿、距离、轨迹以及稳定性方面的准确度和重复性,可以较为全面地对该机器人的性能进行评价。该机器人的位置准确度为1.021 mm,大于一般的工业标准0.02 mm[8],因此在利用该机器人进行实验时,需要先进行DH参数校准。其位姿、距离和轨迹的重复性均小于准确度,表明该机器人可以通过DH 参数校准,提升各项指标的准确度。
