变增益自抗扰控制的光伏水泵MPPT建模与仿真
2021-12-14余运俊谢太明黄玉水胡湘玉
余运俊,谢太明,黄玉水,胡湘玉
(南昌大学信息工程学院,南昌 330031)
0 引言
太阳能资源丰富、绿色环保,是21 世纪最具发展潜力的可再生能源[1]。光伏水泵系统是利用太阳能抽水的装置,通过光伏阵列将太阳能转换为电能,再利用电能进行抽水,被广泛应用在干旱缺水地区[2]。光伏水泵系统中,光伏电池阵列的输出功率受环境温度、光照强度等因素的影响,具有明显的非线性特性[3-4]。为了提高光伏电池的利用率,使之始终工作在最大功率点附近,常在系统中采用最大功率点跟踪(maximum power point tracking,MPPT)技术[5-6]。
国内外研究和应用的MPPT 算法有很多,常用的MPPT控制算法可分为:①传统算法,具体有扰动观察法(perturbation and observation,P&O)[7-8]、电导增量法(incremental conductance,INC)[9]。P&O 和INC 的区别在于电压变化的判断条件不同[10]。在此基础上改进后提出的变步长扰动观察法、变步长电导增量法等[11-12]。②智能算法,主要有粒子群算法[13]、遗传算法等。扰动观察法和电导增量法适用范围大,是目前使用最多的MPPT 算法,广泛应用于实际工程中[14]。自抗扰控制(active disturbance rejection control,ADRC)是一种估计扰动并补偿扰动的控制算法,其关键在于从被控输出量中提取扰动信号,并在控制律中进行扰动补偿[15-16]。
本文研究了一种变增益ADRC 与变步长P&O 相结合的MPPT策略,并应用于光伏水泵系统中,在建立光伏水泵系统数学模型的基础上,给出了ADRC 的设计方法,ADRC对系统扰动进行估计补偿,减小了系统功率振荡,提高了光伏泵的工作效率。
1 光伏水泵系统模型
1.1 光伏电池模型
光伏电池模块是一个非线性的模块,它可以等效为电流源和二极管并联,再加上电阻来等效损耗,光伏电池单元的等效电路图如图1 所示。
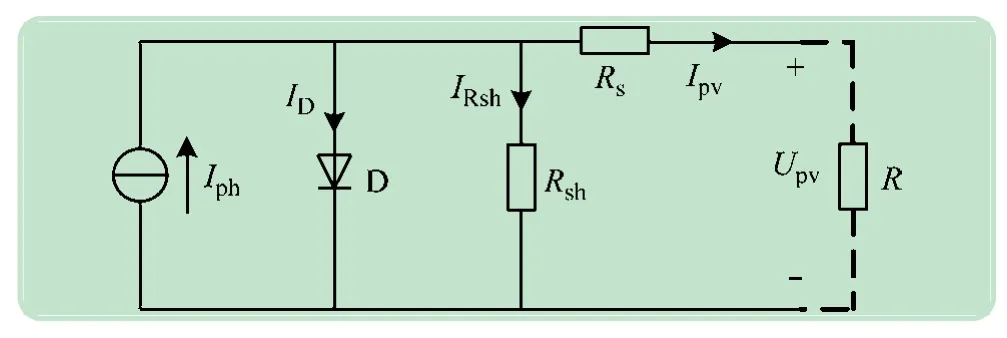
图1 光伏电池单元等效电路
万晓凤等[17]给出了光伏电池的数学模型。

式中:Ipv为光伏电池输出的负载电流;Iph为光伏电池内部光生电流;ID为光伏电池内部暗电流;IRsh为光伏电池漏电流。其中:

式中:Io为二极管的反相饱和电流;Upv为光伏电池输出电压;N是二极管特性因子;q为电子电荷(1.602 9e-19C);k为玻尔兹曼系数(1.381 9e-13J/K);T为光伏电池热力学温度[17]。

光伏阵列在不同光照强度和温度下的I -U、P -U特性曲线如图2、3 所示。光伏电池的输出功率等于光伏电池输出电压和电流的乘积,光伏电池阵列的输出功率易受环境温度、光照强度等因素的影响,采用MPPT技术,可实现光伏电池对最大功率点的跟踪。

图2 光照变化时光伏阵列特性曲线
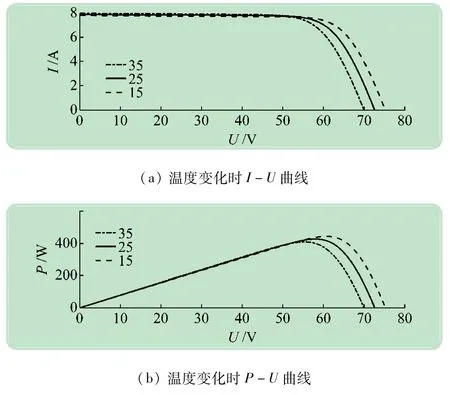
图3 温度变化时光伏阵列特性曲线
1.2 光伏水泵模型
光伏水泵系统,包括光伏阵列、MPPT控制装置和水泵3 部分,光伏阵列为整个系统提供能量;MPPT 控制装置实现最大功率点跟踪,通常选择DC-DC 电路;水泵子系统主要包括电动机、水泵以及蓄水装置等。对不同的光伏水泵系统而言,驱动电动机和水泵类型的选择也不同。驱动电动机有直、交流之分,水泵也有正排量泵和离心泵等类型的区别。本文选择直流无刷电动机和正排量泵搭建小功率光伏水泵系统,正排量泵与离心泵相比,在小功率条件下会有更高的效率,扬程可调节的范围大。
将电动机和水泵视为一个整体,忽略水泵物理结构各种参数之间的关系,只关注其输入与输出,输入量为功率,输出量包括水泵的扬程和水流量。Hamidat等[18]给出了一种小功率直流水泵的工作数据并以此建立了水泵的数学模型:

式中:P为电动机泵的输入功率;h为扬程;Q为水流量;ɑ、b、c、d分别为各个水流量多项式的系数:
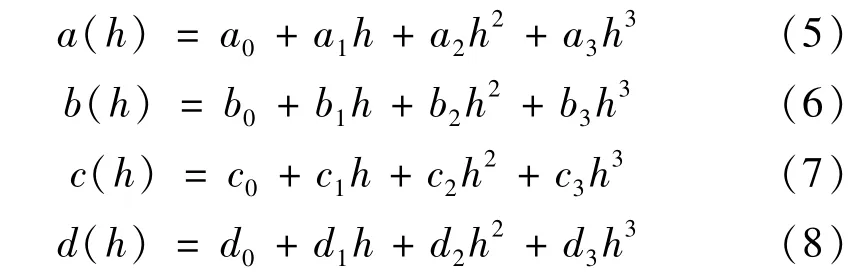
通过实际的水泵工作数据,使用最小二乘法拟合建立数学模型,式中各个系数的值可以用一个矩阵来表示,最终得到输入功率和扬程与水流量的非线性函数关系:
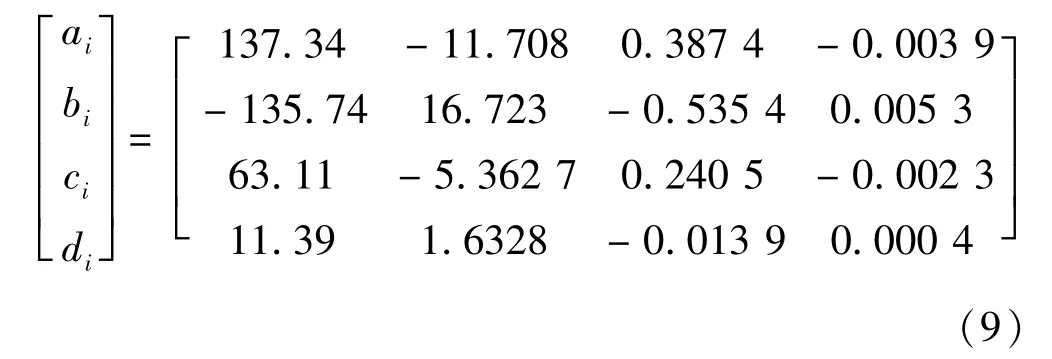
式中,i=0,1,2,3。由P(h,Q)函数求得Q(h,P)函数,即求出水流量与功率和扬程的非线性关系,以此作电动机泵子系统的数学模型。
2 光伏水泵系统MPPT设计
为让光伏水泵系统能够稳定工作在最大功率点处,需要给系统设计MPPT策略,实现对最大功率点的跟踪。选择Boost变换器作为光伏电池MPPT 的控制装置,通过MPPT得到的PWM 脉冲信号来控制Boost电路中开关管的通断。对于MPPT 算法的选择,扰动观察法是一种比较适用的算法,其算法简单,实现成本低,调节范围大,可以在分布式小功率光伏水泵系统中用来实现MPPT。
传统的扰动观察法是通过固定步长扰动改变光伏电池工作点的方式,来实现对最大功率点的跟踪,其工作原理是在每个控制周期中用固定步长的扰动改变光伏电池的工作点电压,采集光伏电池的输出电压U(k)和输出电流I(k),计算输出功率P(k)=U(k)·I(k),然后比较扰动前后的功率值P(k-1)和P(k)以及输出电压U(k-1)相比较,确定施加扰动的方向。根据输出功率差值dP和输出电压差值dU的符号,可分为4 种情况:以dP>0 为例,当dP>0,dU>0 时,说明扰动方向正确,之后施加的扰动应与之前的扰动方向相同,当前控制周期的光伏电池参考电压应该加上设定的步长值C;当dP>0,dU<0 时,当前控制周期的光伏电池参考电压应该减去设定的步长值C。按照上述步骤经过若干次反复之后,最终会跟踪到最大功率点处。扰动观察法流程图如图4 所示。
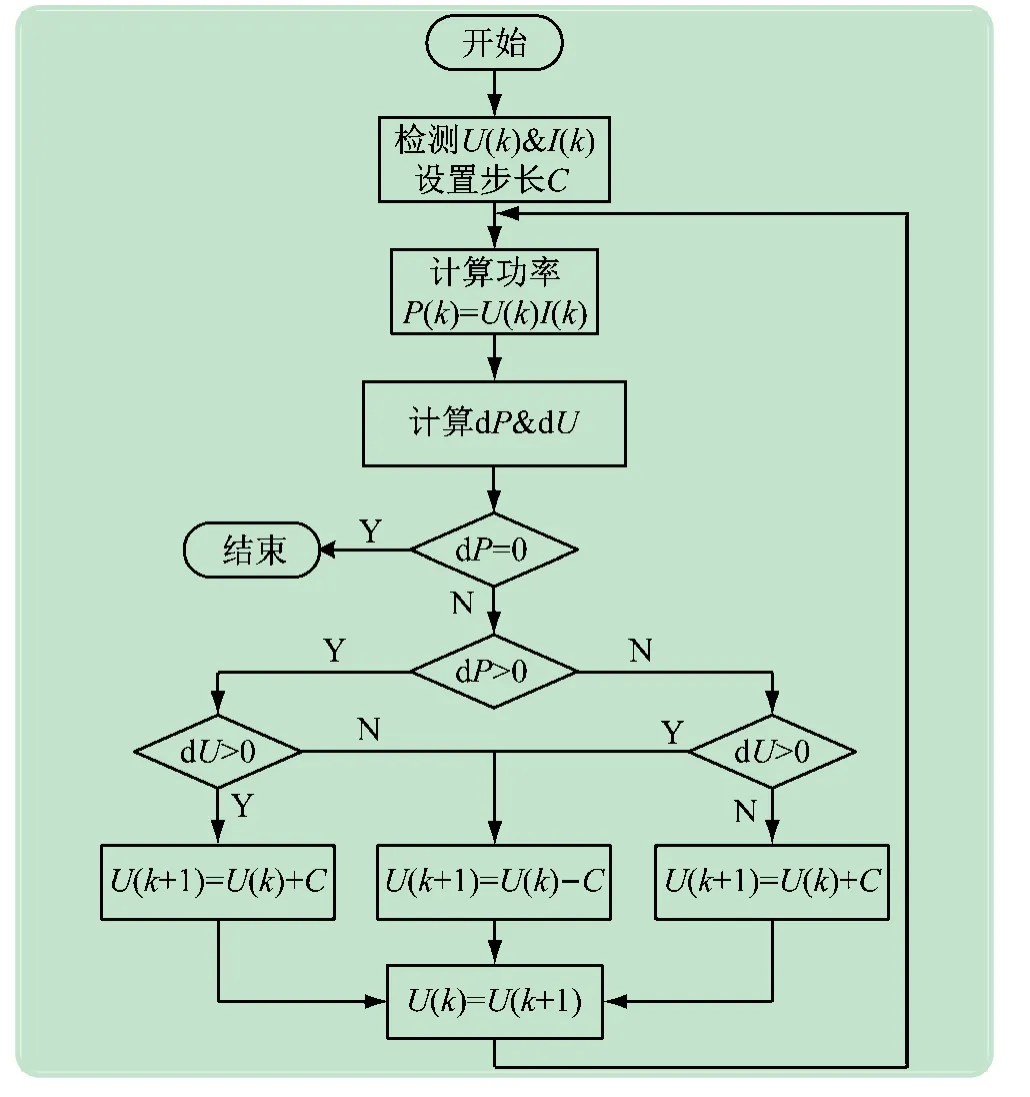
图4 扰动观察法流程图
扰动观察法需要选取合适的扰动步长,传统扰动观察法采用的是定步长扰动,扰动步长选取过大,会增加最大功率点附近的波动;扰动步长选取过小,虽然可以减小波动,但是会增加跟踪所需的时间。对扰动观察法进行改进,根据前后功率差值设定不同的扰动步长,实现扰动步长的切换。同时,在变步长的基础上引入ADRC 控制器,对系统扰动进行估计补偿,减小功率振荡。
3 光伏水泵系统ADRC的设计
光伏水泵系统由光伏电池、Boost电路以及作为负载的水泵3 部分组成,光伏水泵系统结构图如图5所示。

图5 光伏水泵系统结构
为了提高光伏水泵系统在外部环境(光照强度、温度等)发生突变时的抗扰动能力,在变步长扰动观察法的基础上,引入ADRC 控制器。将ADRC 控制器安排在MPPT之后,对MPPT 算法输出的参考电压进一步优化,减小光伏电池输出电压及功率的波动。根据图5,可将输出电压和输出电流的关系表达如下:

ADRC控制器由跟踪微分器、扩状态观测器和非线性控制率3 部分组成。跟踪微分器安排过渡环节,扩张状态观测器对系统输出及总扰动进行估计,非线性控制率将经微分跟踪器处理的给定信号与扩张状态观测器反馈回的信号非线性相加,再加上扩张状态观测器估计的总扰动,一起作为被控目标的控制输入。韩京清教授提出的ADRC控制器3 个组成部分均采用非线性函数,参数较多,调节复杂。高志强教授将ADRC线性化,略去了跟踪微分器,将参数与系统带宽相联系,简化了参数整定。将光伏水泵系统看作是一个一阶系统,为其设计一阶线性ADRC,其结构如图6所示。其中,LESO为线性扩张状态观测器,LSEF为线性反馈控制律。
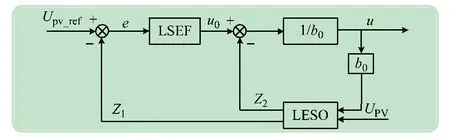
图6 ADRC结构图
对于一阶系统而言,都可以写成如下形式:

式中:y为系统输出;u为控制量;f为系统总扰动;b为系统的控制量增益,是系统的固有参数,通常无法得到精确值,可通过b0对其进行估计,估计不准确的部分b-b0可叠加到系统总扰动f中,再对总扰动进行估计补偿。在光伏水泵系统中,被控量是光伏电池的输出电压Upv,即y=Upv。
选取状态变量:x1=y;x2=f,式(11)转化为连续扩张状态空间描述:
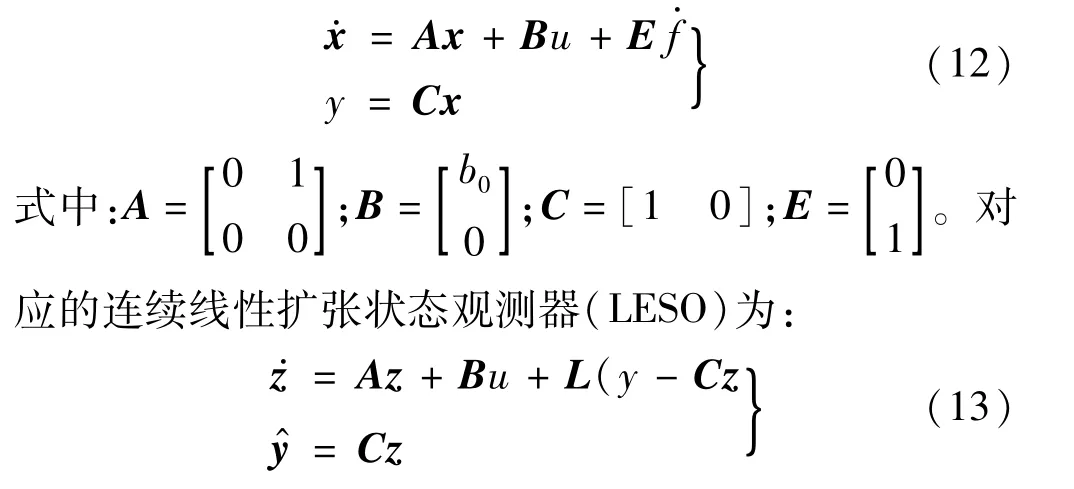
式中:z为观测器状态向量,z1观测x1即光伏电池的输出电压Upv,观测误差e1=z1-Upv;z2观测系统总扰动f。L为观测器误差反馈增益矩阵,L=[β1β2]T。式(13)也可写成:
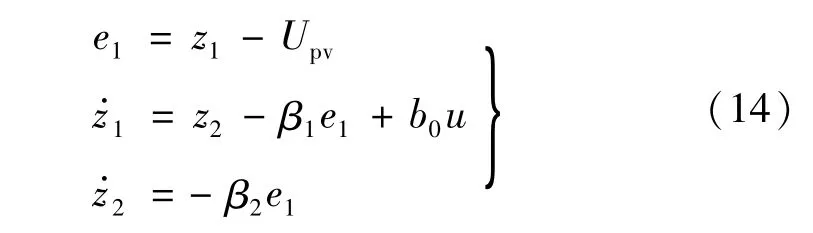
线性反馈控制律(LSEF):
式中,e为光伏电池参考电压与电压观测值的误差。通过z2对系统总扰动进行补偿,再通过式(15)的反馈控制律对系统进行控制。ADRC 的数学模型如上所示,整个ADRC控制器中,主要有β1、β2、b0、k这4 个参数。观测器的参数可通过带宽法进行整定,选取合适的β1、β2,可实现观测器对系统式(12)中各状态变量的跟踪。由式(13)可知:

将观测器的极点统一配置在-ω0(ω0为观测器带宽)处:
可以得出β1和β2的关系,β2=0.25β21,b0、k的值在β1和β2的参数确定后再进行适当选择。当MPPT算法步长变化时,与其对应的ADRC 控制器增益对系统的调节效果有所减弱。为应对变步长的扰动观察法,提出一种改变控制器增益的ADRC,即扰动观察法的步长改变时,ADRC控制器增益也调整到合适的值,实现更好的控制效果。
4 仿真实验分析
本文提出了一种基于变增益ADRC 与变步长扰动观察法结合的MPPT 算法,为验证控制算法的有效性,在不同的情况下进行仿真分析。光伏电池仿真模型参数设置如下:温度为25 ℃时,在1 kW/m2的太阳辐射强度下,光伏阵列最大功率427 W,开路电压72.6 V,短路电流7.86 A,最大功率点电压58 V,最大功率点电流7.35 A,短路电流温度效应系数0.002 5,开路电压温度系数0.5。对于不同步长的扰动观察法,输出功率响应速度和稳态误差也不同。设定ADRC 控制器各模块的参数,β1=0.34,β2=0.002 9,b0=4,k1=6,k2=4,k2为扰动步长改变后的ADRC 控制器增益。
在光照1 kW/m2,温度25 ℃时,选择两个不同的步长,步长取0.001 和0.002,设定调整时间为最后一次到达跟踪值的95%的时间。如图7 所示,在步长为0.002 时,系统响应更快,调整时间为23 ms,在步长为0.001 时,系统响应慢,调整时间为37 ms,但功率波动小。
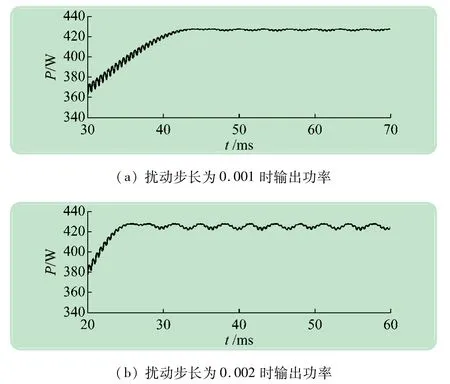
图7 不同步长下最大功率点跟踪
由图8(a)可知,在变步长的扰动观察法条件下,标准情况(光照1 kW/m2,温度25 ℃),系统快速响应达到稳态,由局部放大图8(b)可以看出,调整时间为22 ms,光伏阵列输出功率波动幅值为2.3 W。模拟光照突变的情况,当t=1 s 时,光照强度由1 kW/m2突变为400 W/m2;当t=2 s时,光照变为1.2 kW/m2,两次光照突变到达新的稳态用时约20 ms。

图8 变步长P&O输出功率
由图9 可知,在变步长的扰动观察法的基础上,加上变增益ADRC 算法,即对不同步长的情况,设置不同增益的ADRC 控制器。如图9(a)、(b)所示,模拟光照突变的情况,当t=1 s 时,光照突变为0.4 kW/m2;当t=2 s时,光照突变为1.2 kW/m2,每次光照突变后达到稳态的调整时间约为23 ms,光伏阵列输出功率波动幅值为0.5 W。与未加ADRC的变步长扰动观察法对比,系统响应速度基本一致,但是系统的功率波动的大幅度减小了。

图9 ADRC+P&O策略下输出功率
为验证在不同步长下检验ADRC 算法的有效性,步长取0.002 和0.004,在光照1 kW/m2,温度25 ℃时,结果如图10(a)、(b)所示。与传统的变步长扰动观察法相比,ADRC 与扰动观察法结合的MPPT 算法下,输出功率的振荡大幅度减小,功率振荡幅值为1.5 W。可以看出,对于不同步长的扰动观察法,ADRC 都能起到减小输出振荡的作用,且在步长越大时,抑制扰动的作用越强。
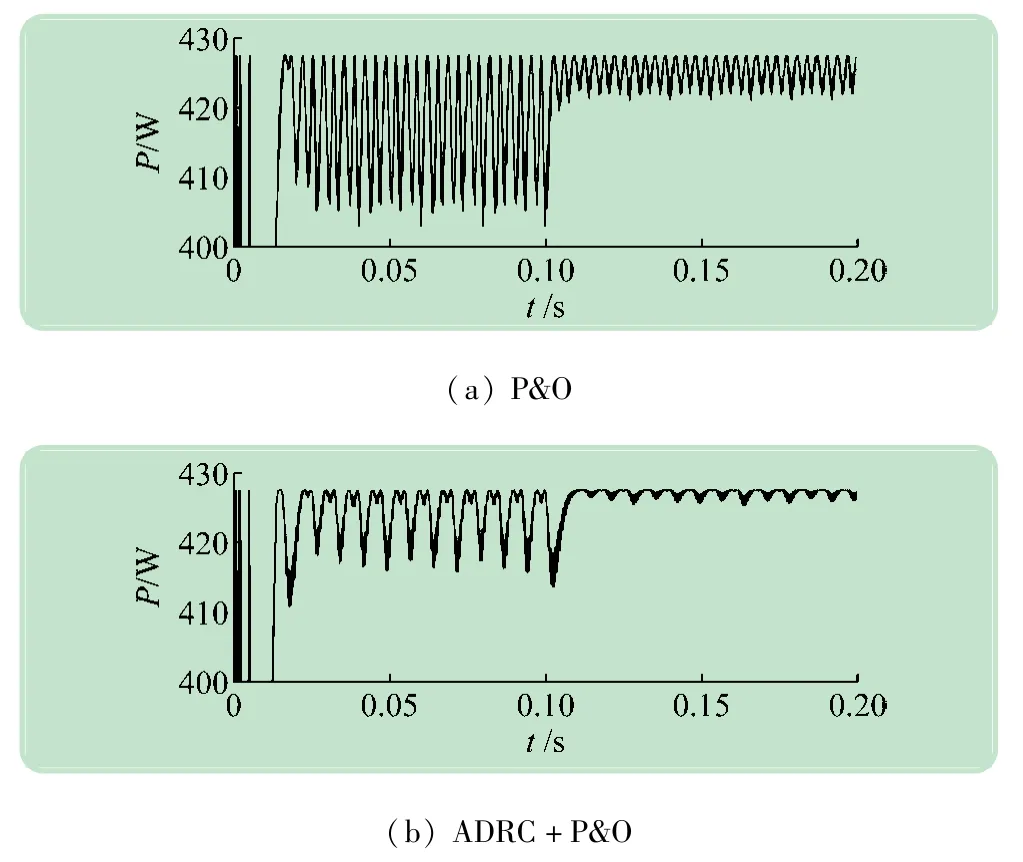
图10 大步长下两种控制策略输出功率
具体控制算法下,模拟不同的光照对水泵抽水速度的影响。在温度为25 ℃,光照1 kW/m2时,两种控制策略下光伏水泵抽水速度的对比如图11 所示。图12 是光伏水泵在不同扬程下水流量与功率的关系,在不同的扬程下,给光伏水泵设定不同的启动功率,在低于启动功率时,切断光伏水泵,高于设定值时,启动光伏水泵。
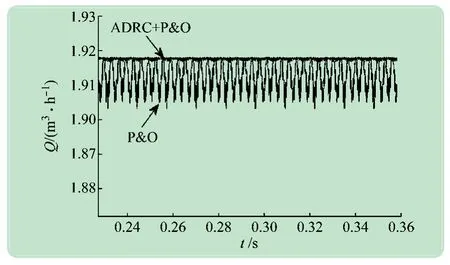
图11 两种控制策略下光伏水泵模型抽水速度

图12 不同扬程下光伏水泵Q-P曲线
5 结语
本文研究了一种变增益ADRC 与变步长P&O 相结合的MPPT 算法,并将其应用于光伏水泵系统中。建立光伏水泵系统数学模型,根据系统的阶数,为其设计了一阶ADRC 控制器。在变步长P&O 之后引入ADRC,对光伏阵列输出电压的扰动进行估计补偿。选择不同步长进行Simulink仿真,结果表明,相比于变步长P&O,基于ADCR的变步长P&O算法,在保证系统响应速度的情况下,减小了光伏阵列的输出功率波动,提高了光伏水泵的抽水效率。运用于实验室仿真教学中,有利于学生理解光伏水泵模型、掌握MPPT策略和ADRC方法。
·名人名言·
学习知识要善于思考,思考,再思考,我就是靠这个方法成为科学家的。
——爱因斯坦
