三相电流型PWM整流器在断续导通模式下的研究
2021-12-14刘一瑾
刘一瑾,杨 奕,2,郭 强,2
(1.重庆理工大学 电气与电子工程学院, 重庆 400054; 2.重庆市能源互联网工程技术研究中心, 重庆 400054)
脉宽调制(pulse width modulation,PWM)整流器一般分为电压源型PWM整流器(voltage source rectifier,VSR)和电流源型PWM整流器(current source rectifier,CSR)[1-2]。长期以来,VSR因其直流侧元件储能效率高、元件体积小等原因,一直是PWM整流器研究的重点[3-5]。随着超导储能技术的快速发展,制约CSR的问题逐渐得到解决[6-7]。因CSR具有输出电压调节范围宽、输入功率因数可调、网侧谐波电流抑制、短路保护等优点,已被应用于如超导储能、电池组充电、光伏并网、电机驱动、数据中心服务器等场合[8-13],具有广阔的发展前景。
在轻载条件下时,整流器直流侧电感电流纹波大于平均电流值,直流侧电流不连续,整流器进入断续导通模式(discontinuous conduction mode,DCM)[14]。由于串联二极管不能反方向传导负电流,如果在DCM下PWM没有变化,网侧电流会产生较大畸变,输出电压超过连续导通模式(continuous conduction mode,CCM)下的预期值[15],因此需要研究如何使整流器在轻载极端条件下控制网侧电流正弦化,并使输出电压减小到CCM下的预期值,即恢复输出电压控制。
目前,针对断续导通模式产生的问题,Guo等[16]中专为三相Buck型整流器的DCM提出一种新型对称调制方案,但仅适用于一定程度的轻载条件。Lan等[17]中针对高频侧矩阵整流器提出一种基于空间矢量脉宽调制的新开关方案,以提高DCM中电流的质量。Guo等[18]中针对许多解决网侧电流畸变的方案仅适用于DCM而不适用于CCM的问题,提出了在2种模式下都适用的通用方案。然而,上述方案只解决了网侧电流畸变的问题而没有考虑输出电压失控,因此需要一种既能解决网侧电流畸变,又能防止输出电压失控的方法。
首先介绍CSR的传统PWM方法,通过分析输入电流和直流侧电流的波形,说明直流侧电流的断续行为会导致网侧电流严重畸变。其次,通过对CSR进行各调制比和各功率负载的开环控制仿真,说明DCM还会导致输出电压失控。为此,提出一种旨在减轻网侧电流畸变和输出电压失控目标的多目标PWM方法。该方法将传统的占空比表达式替换为取决于模式的占空比表达式。针对调制模式下的Buck-Buck电压模式,根据不对称和对称DCM两种情况下的直流侧纹波电流,推导出多目标PWM的占空比表达式,并给出控制结构。最后,通过仿真和实验对所提出的方法进行验证。
1 CSR的传统PWM方法
CSR电路的拓扑结构如图1所示,其中vas、vbs、vcs为电网电压,ias、ibs、ics为网侧电流,ia、ib、ic为交流侧电流,输入滤波电感Ls与电容Cs组成2阶LC滤波器,以滤除交流侧电流谐波,同时抑制交流侧电压谐波。直流侧包括储能电感Ldc、输出电容Cdc与负载RL。整流器开关管采用绝缘栅双极型晶体管(insulated gate bipolar transistor,IGBT)串联二极管的结构,以阻断反向电流,同时提高反向耐压能力。续流二极管D为电感电流提供续流通路,可减少开关的动作次数,简化控制电路,防止直流侧开路,提高电路可靠性。
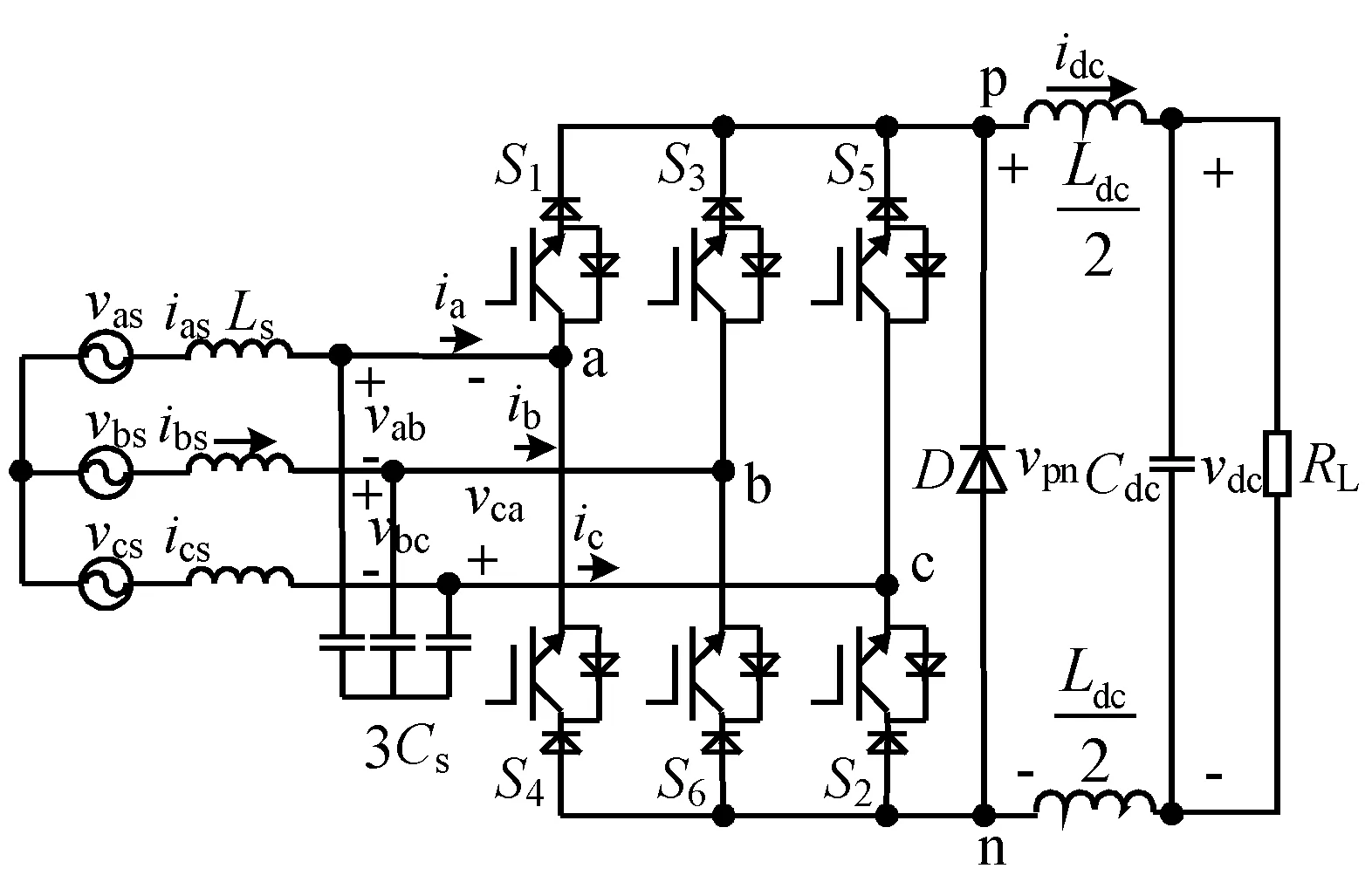
图1 三相CSR拓扑结构电路图
根据网侧三相电流之间的大小关系,将1个网侧电流周期分为6个扇区,每个扇区内的线电压和电流如表1所示。空间矢量分布如图2所示。
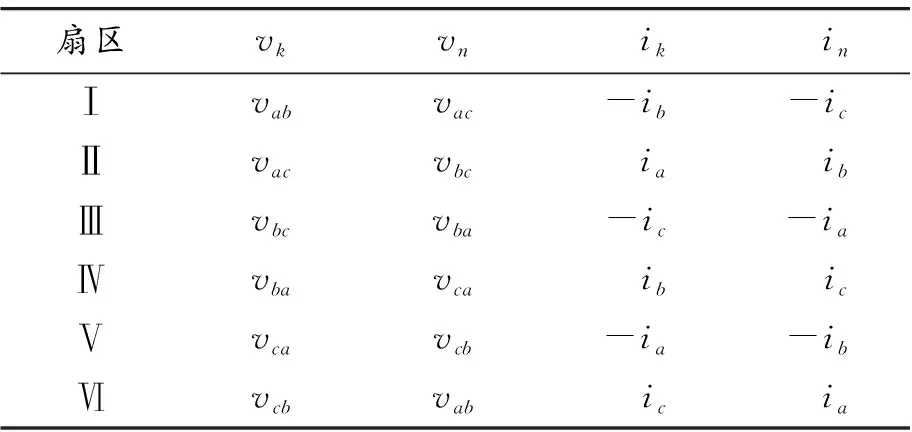
表1 扇区相对应的线电压和电流

图2 空间矢量分布图
在1个开关周期内,开关管的状态以及直流侧电感电流从电源流向负载的路径如图3所示。有效开关k和n的开关状态与有效状态矢量相对应。vk和vn表示交流侧的线电压,ik和in表示流经有效开关k和n的交流侧相电流。当Sk和Sn都处于关断状态时,二极管D续流,称为续流(零)状态。在1个开关周期Ts内,k状态、n状态及续流状态的作用时间被定义为:

(1)
式中:dk(φi)、dn(φi)分别是开关管Sk、Sn的占空比;φi是合成电压矢量与扇区电压矢量的夹角,φi∈(0,π/3)。占空比在1个扇区内随φi呈正弦变化。

图3 扇区Ⅱ的开关管状态和电流路径图
假定电网电压三相平衡,直流侧电流恒定。由于滤波电感Ls上的压降,电网电压和交流侧电压会有一个小的相位差。网侧电流和交流侧电流也有一个小的相位差。为便于分析,忽略该差异[19]。假设图3中电压和电流为:

(2)

(3)
假定网侧线电压的峰值为Vi,则网侧相电压可表示为:

(4)
开关管Sk、Sn的占空比为(mi在后面定义):
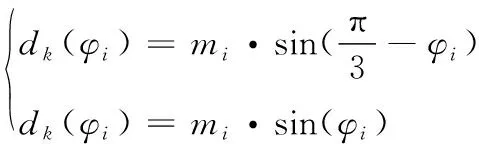
(5)
2 直流侧电流纹波的影响
图3中,开关状态序列决定了调制模式,即各种调制模式的区别在于1个开关周期Ts内k、n两个有效状态和续流状态的顺序,以及续流状态的位置。图4给出了2种调制模式下二极管D两侧的电压vpn和直流侧电流idc的波形。
图4(a)显示了调制模式Ⅰ[20],续流状态分别在2个有效状态之后。图4(b)显示了调制模式Ⅱ[21],其有效状态相邻,通过改变有效状态矢量的作用顺序,使得最大的有效电压序列首先出现。

图4 2种调制模式的vpn和idc曲线
调制模式Ⅱ的开关变换种类比调制模式Ⅰ少,损耗更低[21-23]。但是,当2种调制具有相同的直流侧电感Ldc和开关频率fs时,调制模式Ⅰ具有更小的直流侧电流纹波。由于本文中研究基于直流侧电流断续,因此选用模式Ⅰ作为调制模式。从图4可以看出,当负载减小时,2种模式都将出现同一情况:由于IGBT串联二极管,直流侧电流不能变为负值,因此电流纹波的底部被切断。在这种情况下,CSR进入DCM模式。
假设输入三相电压平衡,交流侧输入线电压vk和vn的表达式为:

(6)
式(6)是式(4)的线推论。
式(5)中调制比mi的表达式为[24-25]:
(7)

图5给出了线电压vk和vn在一个扇区内的变化情况,以及不同调制比mi下输出电压vdc的幅值。为便于分析,均采用标幺值。存在3种工作模式,即Buck-Boost,Buck-Buck和Boost-Buck。vk、vn与vdc的幅值关系决定CSR是在Buck还是Boost模式下运行。在图4中,当φi=π/24时,vk>vdc且vn

图5 每扇区线电压vk、vn与vdc在不同调制比mi下的变化曲线
为说明直流侧电流纹波的影响,对CSR进行仿真,采用调制模式Ⅰ,从式(5)的占空比表达式中产生开通信号。系统开环运行,mi=0.5,fs=20 kHz。平均交流侧电流〈ia〉是通过对交流侧电流ia进行滤波得到,并与网侧电流ias进行比较。图6给出了额定负载下运行的仿真结果,其中图6(a)是在Lb=4 mH时运行,图6(b)是在Lb=0.2 mH时运行。结果表明,在额定负载下,2种情况的网侧电流总谐波失真(total harmonic distortion,THD)值都小于10%。图7给出了在20%额定负载下运行的仿真结果,在Lb=4 mH时,THD值约为10%,而在Lb=0.2 mH时,THD值非常大,这是idc的断续导致网侧电流畸变严重的结果。

图6 额定负载下输入电流和直流侧电流波形

图7 20%额定负载下输入电流和直流侧电流波形
图8是输出电压vdc与输出功率pdc的关系图。图中数据是在Lb=0.2 mH时,对CSR进行各调制比和各功率负载的开环控制仿真得到的结果。为便于分析,各变量都采用标幺值。结果表明,DCM另一个大的影响是输出电压vdc失控。

图8 输出电压与输出功率的关系
上述分析表明,CSR在DCM下运行时,会导致网侧电流畸变严重和输出电压失控。
3 多目标PWM方法
针对DCM导致的问题,提出一种多目标PWM方法,将传统PWM方法的占空比表达式替换。所替换的占空比表达式会根据调制模式(如调制模式Ⅰ、调制模式Ⅱ)、电压模式(即Buck-Boost,Buck-Buck和Boost-Buck)以及DCM运行程度(即电流断续的程度)而不同。
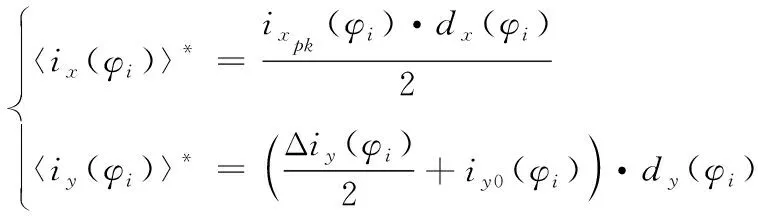
假设采用调制模式Ⅰ,运行在Buck-Buck电压模式,则1个开关周期内开关函数hk、hn,交流侧电流ik、in,直流侧电流idc以及平均直流侧电流〈idc〉的波形如图9所示。其中,开关函数hk、hn与开关管Sk、Sn的开关状态有关,mi的取值要使得Buck-Buck电压模式成立(即有效电压的幅值总是高于输出电压)。
已知以下关系式是成立的:
(8)
式中:〈ix(φi)〉是流经开关管Sk和Sn的平均电流,x=k、n;Zs是交流侧的滤波阻抗。
根据DCM运行的程度,存在2种不同的工作模式,即不对称DCM模式和对称DCM模式。
3.1 不对称DCM模式
根据图9可以分别推导出k状态和n状态的占空比。图9(a)中不对称DCM的形成条件是:在Sk开关动作后,Sn在直流侧电流idc还未降到0之前开通。
CSR处于续流状态时,指定其中一段时间为d0x或d0y。在半个开关周期内,下式之一成立:

(9)
在1个矢量扇区内,当φi为0~π/6时,x=k,y=n;当φi为π/6~π/3时,x=n,y=k。
对图9(a)中ik、in的波形运用等面积法可得:
(10)

已知直流侧电感Ldc和开关频率fs,根据直流侧电感的电压电流关系式,各变量的表达式为:

(11)
由波形和电感的电压电流关系式可得:
对直流侧电感利用伏秒平衡,得到:
(12)
将式(12)代入式(11),再将式(11)代入式(10)求解占空比,得到式(13)所示的多目标PWM占空比表达式为:

(13)
式中:k=Ldc*fs,iy0(φi)可由图中变量关系和电感的电压电流关系式求得:
3.2 对称DCM模式
假设图9(b)中的Ldc和fs与图9(a)相同,当负载进一步减小时,将出现图9(b)中的对称DCM模式。对称DCM的形成条件是:在Sk开关动作后,Sn在直流侧电流idc降到0之后开通。
在对称DCM模式中,下式是成立的:

(14)
对图9(b)中ik、in的波形运用等面积法可得:
(15)
其中x=k或n。
将式(15)和同样适用的式(11)中的一式联立求解,可得式(15)中占空比为:
(16)
其中,x=k或n。
此外,当iy0趋于0时,式(13)可简化为式(16)。

图9 在1个开关周期内开关函数hk、hn,交流侧电流ik、in,直流侧电流idc,平均直流侧电流〈idc〉的波形
4 控制结构
图10为CSR开环电路的控制结构。图中阴影部分为占空比控制器,通过锁相环确保与输入电压同相;扇区判断后得到扇区内的电相角φi,并通过公式计算出占空比控制量dk、dn;调制模块根据表1为指定扇区分配有效开关状态。

(17)

假设输入电压、电流同相位,则前馈平均输入电流表达式为:

(18)
在进行占空比计算前,需要确保CSR工作在Buck-Buck电压模式,因此要对vk,vn和vdc进行比较,以检测vdc在图5中电压模式的位置。由图5可知,当mi< 0.577时,CSR始终工作在Buck-Buck电压模式。
因为交叉耦合的表达式(13)可自动简化为解耦的表达式(16),因此在图10(b)的占空比计算中,不需要先检测是不对称模式还是对称模式,可直接使用式(13)进行占空比计算。

图10 CSR开环电路的控制结构
因为多目标PWM方法基于DCM模式,所以在占空比计算前还需判断CSR是运行在DCM模式,还是运行在CCM模式。当CSR运行在DCM模式时:

(19)
直流侧电流纹波的峰值Δidcpk可通过下式计算出[5]:
(20)
其中,Vm为网侧相电压的峰值。
平均输出电流〈idc〉=vdc/RL,当输出电压为指令值时,〈idc〉的值取决于负载RL。因此,只要计算出CCM和DCM之间的边界负载,要判断CSR是运行在DCM模式还是CCM模式,就可通过判断负载大小来确定。
5 仿真实验结果
建立Matlab/Simulink下的CSR系统仿真模型,对所提出的方法进行验证。仿真所用主要参数如表2所示。
表2 CSR主要参数
图11给出了切换多目标PWM方法前后的仿真结果。

图11 切换多目标PWM时的仿真波形
切换多目标PWM方法前后的网侧电流谐波含量如图12所示。图12(a)网侧电流的总谐波畸变率THD为31.21%,图12(b)网侧电流的THD为12.33%。可以看出,切换多目标PWM后网侧电流的THD值大大减小。

图12 网侧电流谐波含量图
建立RT-LAB半实物实验平台,其示波器的波形如图13所示,与Matlab/Simulink仿真的波形对应。

图13 RT-LAB示波器波形
综上所述,多目标PWM方法可以减轻DCM导致的网侧电流畸变严重、输出电压失控的问题,使得网侧电流正弦运行,并恢复输出电压的控制。
6 结论
针对CSR运行在DCM下出现的问题,提出了一种多目标PWM方法。首先分析了CSR的传统PWM方法,并通过分析直流侧电流纹波的影响,说明直流侧电流的断续行为会导致网侧电流畸变和输出电压失控;然后根据DCM下直流侧的纹波电流推导出占空比表达式,提出一种多目标PWM方法,并给出这种方法的控制结构;最后建立Matlab/Simulink仿真模型和RT-LAB半实物实验平台,通过切换多目标PWM方法前后输出电压、直流侧电流和网侧电流的仿真波形,验证了所提出方法的正确性。研究结果表明:CSR在轻载条件下采用多目标PWM方法可使得网侧电流正弦化,输出电压接近指令值。
