基于Acquire软件的相控阵超声曲面自适应仿形方法
2021-12-13朱利民
陈 恺,朱利民,张 杨
(上海交通大学 机械与动力工程学院, 上海 200240)
相控阵超声技术具有检测效率高和便于开发自动化检测系统等特点,近年来在航空航天领域的复合材料、大型复杂构件的检测中应用广泛[1]。相控阵超声系统的探头由多个阵元以不同的阵列形式排布,通过对不同的阵元施加幅值、相位不同的激励电压脉冲,调整延时法则,可实现声束焦点位置和方向的调整[2],同时,多个阵元进行超声信号收发可大大提高检测效率。在检测未知形状的试件时,由于无法预先计算延时法则,超声能量在传播过程中损失过大,测量范围减小,测量精度受到影响[3]。在检测曲面试件时,部分超声成像算法(如全聚焦成像和平面波成像)都要求曲面形状已知[4]。
针对未知形状曲面构件的超声检测问题,目前广泛采用自适应全聚焦成像和自适应平面波成像法来解决。自适应全聚焦成像法采用依次激发阵元、所有阵元接收信号的收发方式[5];自适应平面波成像法采用激发所有阵元并使用所有阵元接收信号的收发方式[6],二者都需要计算测量区域内每个像素点的超声信号叠加幅值,并根据图像结果提取出构件的表面轮廓。这两种方法的缺点是需要大量计算声波的传播路径,难以应用于实时检测[7]。
ROBERT等[8]提出了自适应的超声检测方法。自适应超声检测技术是一种基于迭代优化的技术,其根据渡越时间对延时时间进行优化,使得超声波聚焦于被测件表面。在此基础上,文章结合脉冲回波仿形技术和界面检测技术,根据渡越时间和自适应超声检测中的延时时间计算构件的表面形状,并将其与全聚焦成像提取的界面轮廓作对比。结果表明,迭代过程可减小脉冲回波仿形测量的误差,且无需测算声波的传播路径。利用M2M公司的Panther型相控阵超声仪器及采集软件Acquire的远程控制接口编写的客户端软件,实现了构件形状的自适应仿形功能。
1 技术原理
1.1 界面检测
界面波的波达时间指的是阵元激发的声波从发射到被阵元接收所需的时间。在激发到接收的过程中,声波会经过数次反射和折射,最终在接收器上形成具有多个波峰的波形。
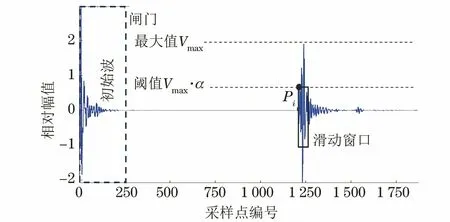
图1 滑动窗口法渡越时间检测示例
对界面波波达时间的检测可转换为对超声渡越时间的检测。超声渡越时间的检测方法可分为时域法和频域法,其中时域方法又包括阈值法、曲线拟合法、滑动窗口法。阈值法是最简单的方法,但其抗噪性能不佳。文章采用滑动窗口法检测渡越时间[9]。滑动窗口法渡越时间检测示例如图1所示,图中第一个出现的回波信号对应的位置即为被测件的界面,但由于该信号包含接收器自身发射的超声声波(初始波),所以不能用于分析界面形状。可根据实际检测采集到的信号设置闸门,将初始波排除。滑动窗口法的原理为,对于一组回波信号,记其最大幅值为Vmax,设定阈值系数为α,则阈值为Vmax·α。使用宽度为N的窗口,从信号起始点以单位点为步长向右滑动,在该窗口内,信号绝对值超过阈值Vmax·α的点数记为n。设定点数阈值为m,若n>m,则认为该处为目标窗口。目标窗口的起始位置对应的点记为Pi(i为点编号),记f为采样频率,则渡越时间tTOF可写为
tTOF=i/f
(1)
相比于阈值法,滑动窗口法对噪声点具有更好的鲁棒性,因为少量的噪声点无法触发窗口阈值。试验的阈值系数α设定为0.2,窗口宽度N设定为50,窗口阈值设定为20(无量纲)。
1.2 相控阵超声延时法则
相控阵超声技术可以对各个阵元进行单独控制使其可独立接收回波信号;也可对各个阵元施加不同的延时,改变叠加波形的方向和聚焦位置[10-11]。当对各个阵元施加相同的控制信号时,各个阵元同时产生球面波,球面波互相叠加,形成行波脉冲[见图2(a)]。改变不同阵元脉冲信号的相对延时,可使叠加声束产生方向偏转[见图2(b)],或产生聚焦[见图2(c)]。因此,可调整延时法则或探头的入射角度,使叠加声束垂直入射复杂形状构件的表面。

图2 相控阵超声不同延时法则的效果
1.3 自适应相控阵超声检测
自适应检测基于迭代方法进行,被测件的表面形状是未知的。每次扫查的延时法则由上一次扫查的渡越时间确定,第一次扫查的延时时间设置为0。扫查时每个阵元均进行发射和接收。ti,j为第j次检测中,第i个阵元测得的渡越时间;Ei,j+1为第j+1次检测中,第i个阵元施加的延时时间。Ei,j+1定义式为[8]

(2)
为保证延时法则中的最小延时为零,需将延时时间按式(3)进一步处理。
Ei,j+1=Ei,j+1-min(Ei,j)
(3)
延时的目的是使得各阵元发射的声波同时到达被测件界面,从而实现叠加声波的垂直入射。把式(3)代入式(2),可得到延时时间的迭代表达式为

(4)
经过数次迭代后,入射波的合成波将逐渐接近平行于被测件表面,此时声波近似垂直入射被测件表面。自适应迭代效果如图3所示,图中线条为各次迭代的叠加声波。迭代的原理为逐步补偿差值使得叠加声波逐渐与试件界面形状一致。

图3 自适应迭代效果示意
1.4 脉冲回波仿形
相控阵超声探头同时激发所有阵元并使用全部的阵元接收超声信号,每个阵元可获得一组A扫描信号。每组信号通过界面检测,可得到各阵元对应的渡越时间。第i个阵元距离被测件表面的距离di可表示为[8]
di=cti/2
(5)
ti=Ti-2Ei+max(Ei)
(6)
式中:c为超声在耦合剂中的声速;Ti为第i个阵元测得的渡越时间;ti为反射时间;Ei为第i个阵元的延时。
以第i个阵元的中心点Ci为圆心,距离di为半径作圆。有以下假设及推论:① 假设入射波垂直于被测件表面,此时被测件的表面轮廓曲线相切于上述的所有圆[12];② 假设相邻阵元的中心距离远小于被测件表面在对应反射点处的曲率半径,则相邻阵元的反射路径平行[13]。
设以第i个阵元为圆心的圆与被测件表面的切点为Mi(见图4),Mi的坐标(xMi,zMi)可表示为
xMi=xCi+di·sinαi
(7)
zMi=di·cosαi
(8)

(9)
式中:αi为第i个阵元的反射路径与z轴的夹角;Ci为第i个阵元的中心点;xCi为Ci的横坐标。
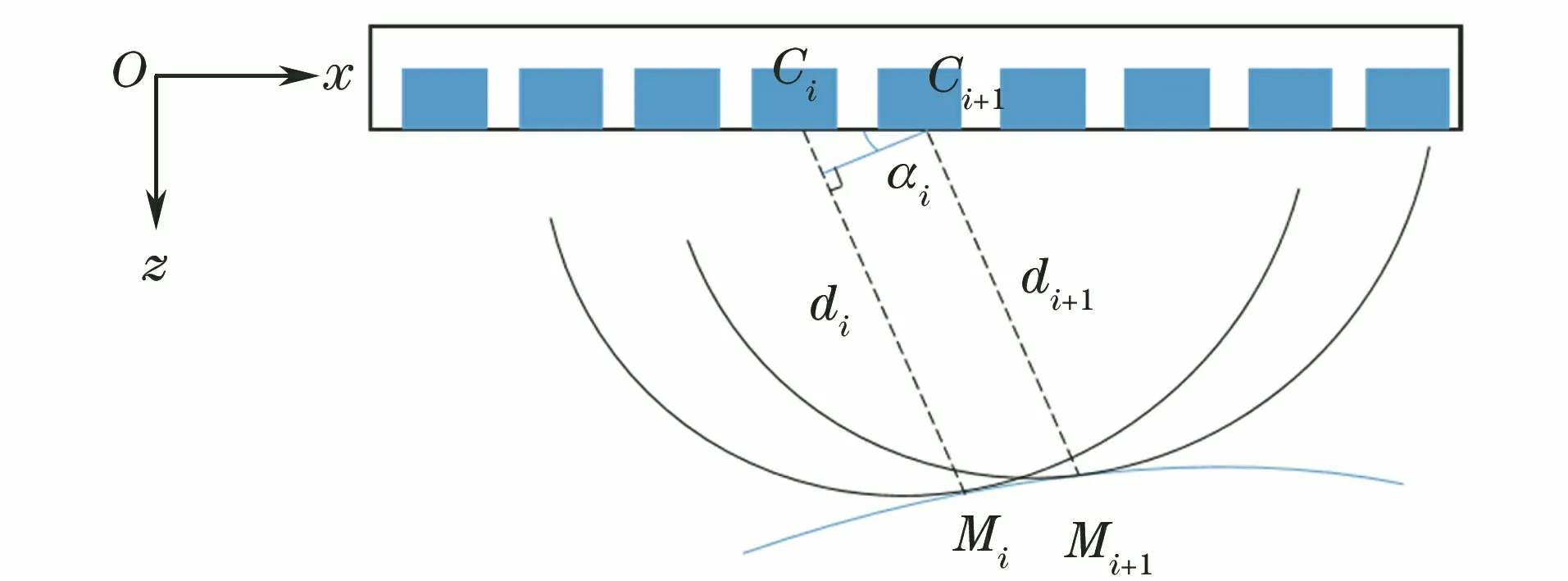
图4 声波与试件表面的几何关系示意
对于阵元总数为N的线阵探头,总共可得到N-1个切点。对切点进行拟合,即可得到该试验对应的曲面形状。
1.5 全聚焦成像轮廓提取
全聚焦成像采用了全矩阵捕捉技术,充分利用了采集过程中的信息,成像效果较好[6]。文章从全聚焦成像中提取轮廓作为自适应测量迭代优化结果的比较对象,避免了与试件模型直接比较时存在的加工误差和配准误差。
全聚焦成像的结果是以测量区域为大小的矩阵数据,由于扫查时探头位于试件的正上方,所以矩阵数据的纵向对应超声的传播方向。提取全聚焦矩阵数据中的列数据x(n)[见图5(a)],对其进行离散希尔伯特变换[14],变换式为

(10)
对全聚焦矩阵数据的每一列进行最大包络提取,可得到一组界面点,进一步对界面点进行三次曲线拟合,即可提取出表面轮廓(见图6红色虚线)。
2 软件开发
笔者结合M2M公司的相控阵超声采集器控制软件Acquire提供的SDK(软件开发工具包)接口进行客户端软件开发,实现了数据传输、渡越时间计算、结果显示等功能。软件的设计流程及相关指令如图7所示。Acquire软件提供了参数设置、数据获取、网络连接等接口和指令,可通过TCP(传输控制协议)通讯进行指令传输。指令传输需要提供对应的函数指令编号、输入参数总长、输入参数,接收的数据包括指令函数运行状态和函数返回值。在计算出延时法则后,需要生成符合Acquire规范的延时文件,通过SDK接口的LoadLawFile指令在超声采集器进行延时设置。StartAcquisition指令用于启动A扫描数据传输,LoadConfiguration指令用于在扫查前设置相关参数。Acquire软件界面如图8所示。
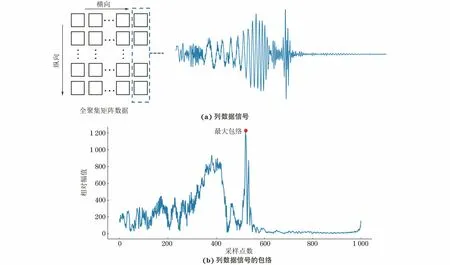
图5 全聚焦成像轮廓的提取

图6 全聚焦图像轮廓提取
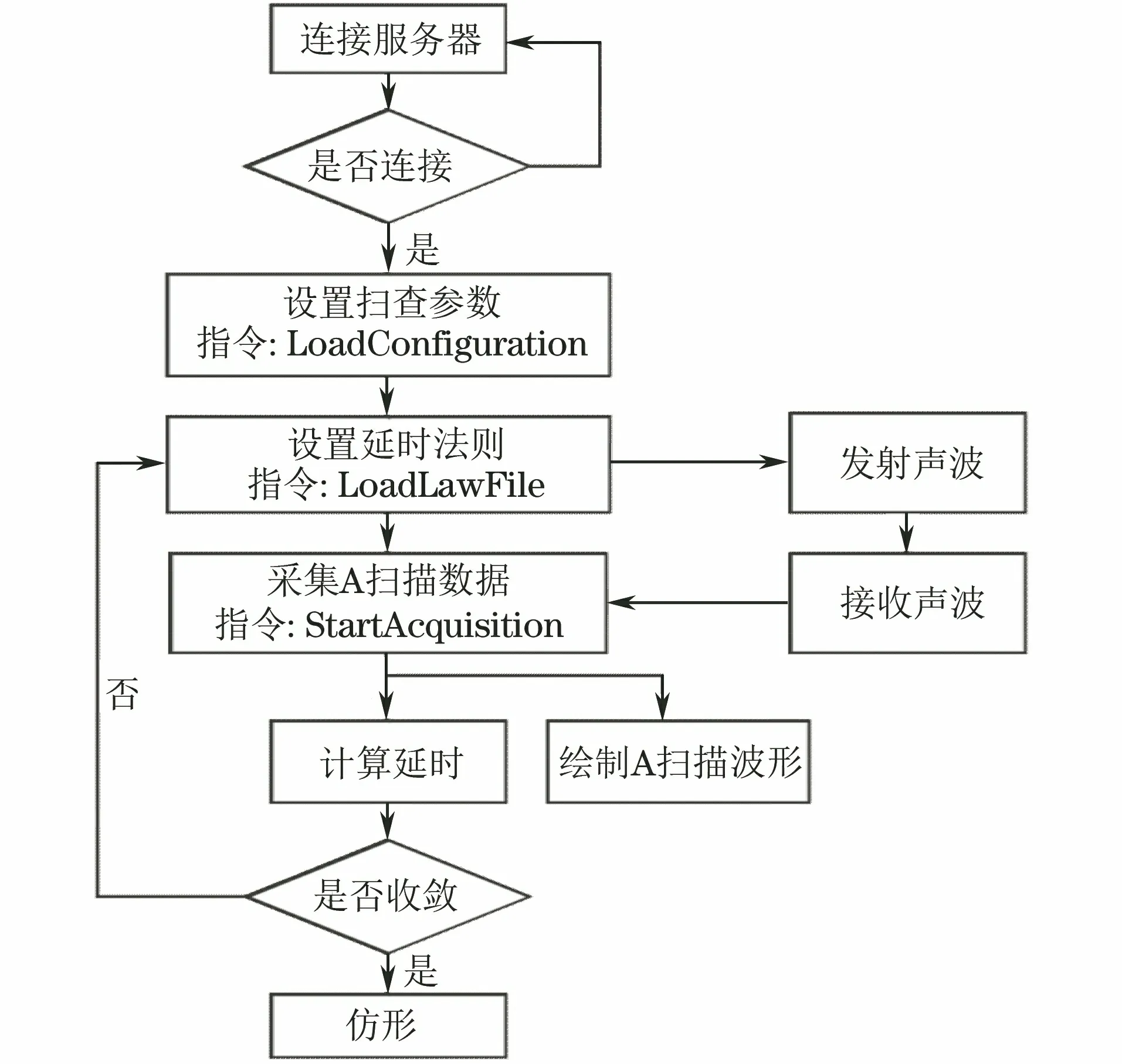
图7 软件的设计流程及相关指令
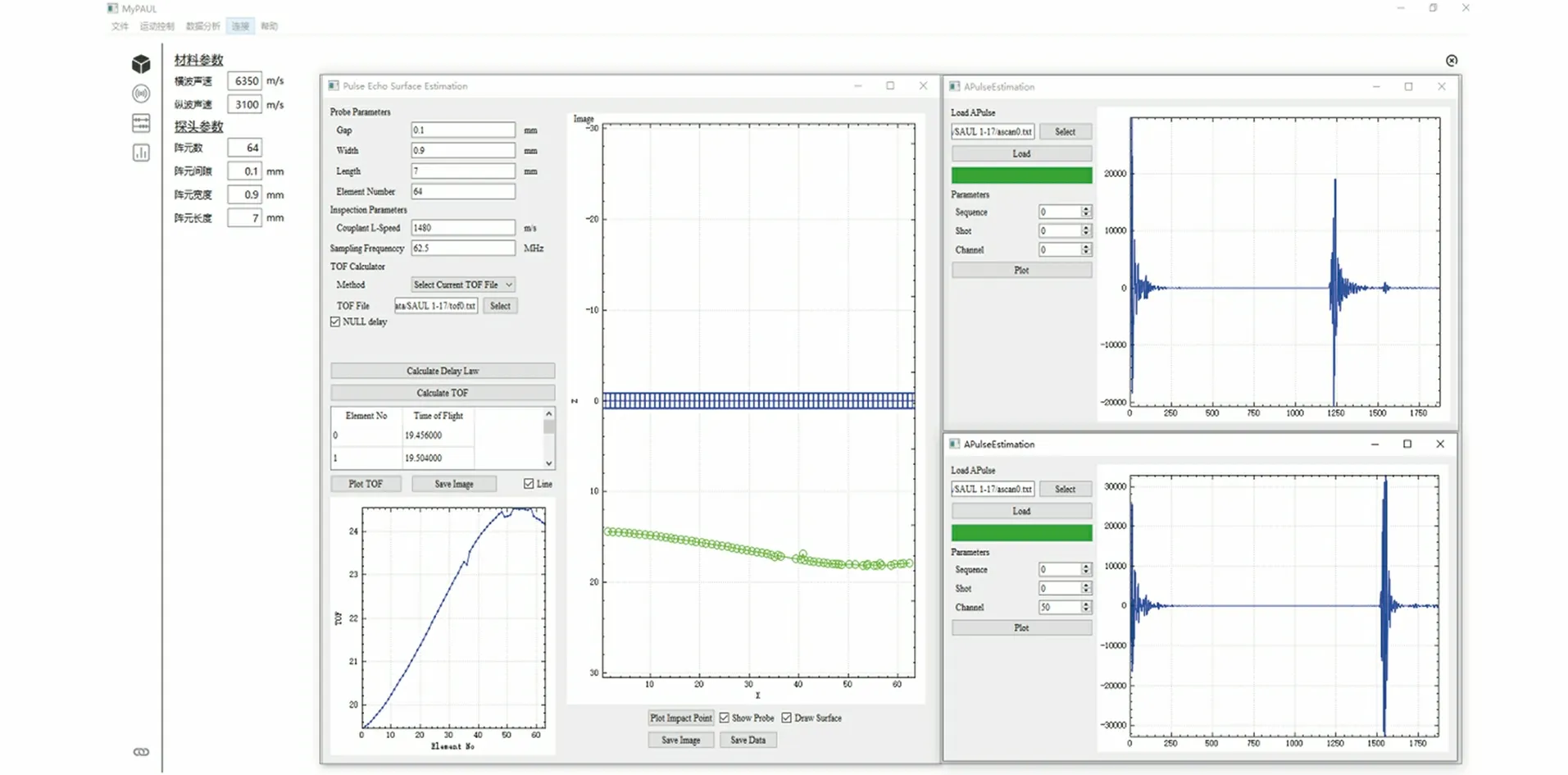
图8 Acquire软件界面
3 试验过程
试验采用水浸法对试件进行检测,试验及设备实物如图9所示,平台由64通道相控阵超声探头、超声采集器、计算机主机、MOTOMAN-MH80型机械臂和水槽组成。机械臂用于控制和调整探头位姿。试件表面轮廓线为贝塞尔曲线,曲率单方向变化,材料为铝合金。

图9 试验平台及设备实物
试验采用的相控阵超声探头型号为5L64-1.0X7-S13-F2.5-D3,探头参数如表1所示,激发电压为70 V。

表1 相控阵超声探头参数
试验时,利用机械臂将探头固定于试件上方20 mm处,阵元排列方向与试件曲率变化方向一致,采集范围为探头阵列投影到被测件界面的轮廓线所覆盖的区域,采集长度为超声探头的总宽度。
4 结果与分析
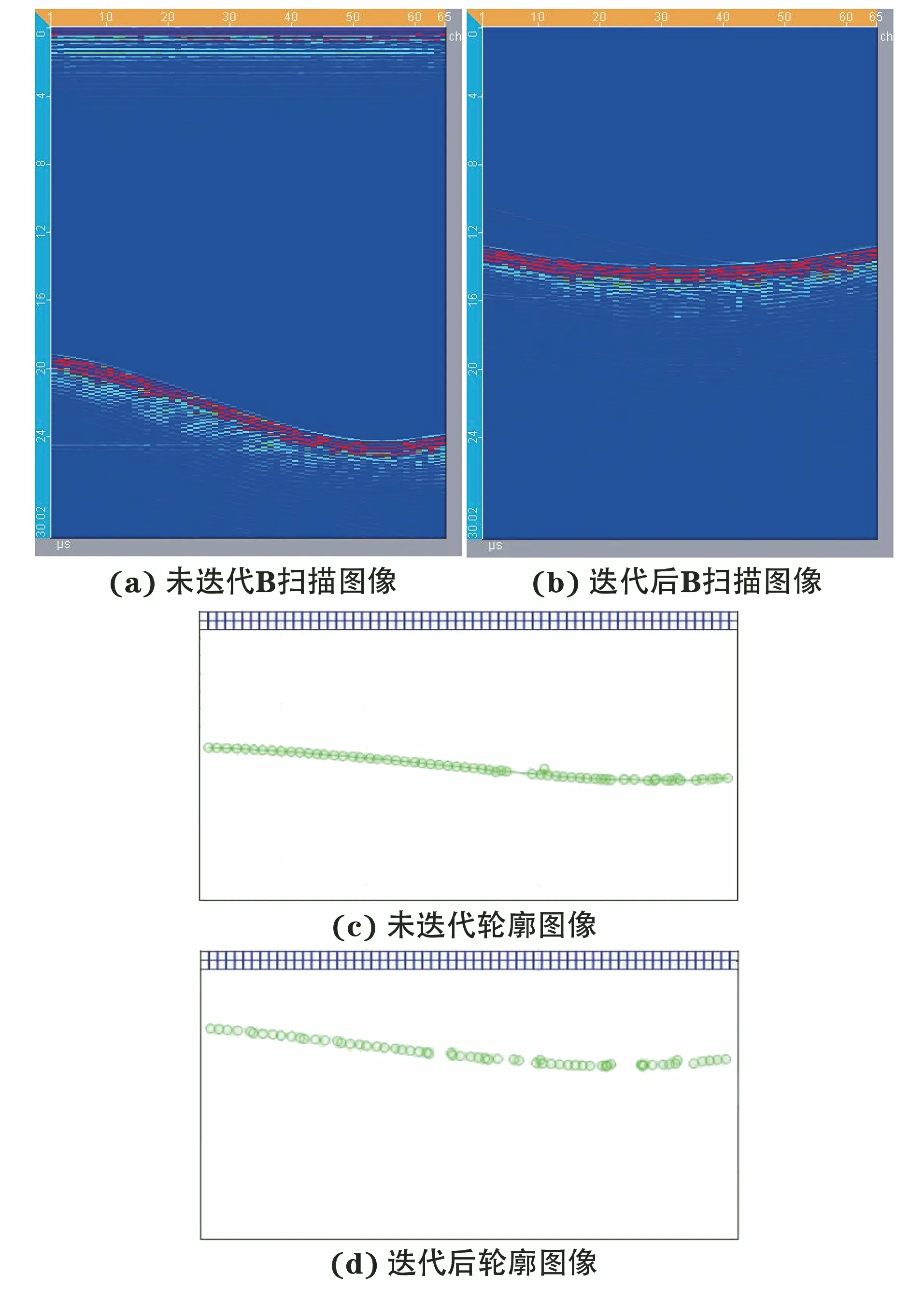
图10 迭代前后B扫描图像及轮廓图像对比
采用全聚焦成像法和自适应仿形法对试件表面进行形状测量,并以全聚焦成像的结果作为参照,分析历次迭代的效果。图10为迭代前后B扫描图像及轮廓图像对比,B扫描图像横向对应各个阵元,纵向为扫查方向,各点处的颜色对应接收信号的强度。未经迭代优化时,由于没有施加延时法则,各阵元发射的声波并不同时到达反射面,所以B扫描图像中分界面曲率有明显的变化。经过迭代优化后,叠加声波接近平行于发射面,因此B扫描图像中的分界面更为平直。
试验共进行4次迭代优化,将提取出的轮廓曲线与全聚焦提取的轮廓曲线进行对比(见图11)发现,迭代优化后得到的轮廓曲线与全聚焦提取得到的轮廓曲线误差较小。迭代最大误差及平均误差如表2所示,可见经过迭代后,最大误差和平均误差均下降,表明迭代具有优化效果。第4次迭代最大误差大于第3次的可能原因为计算渡越时间时产生了误差。
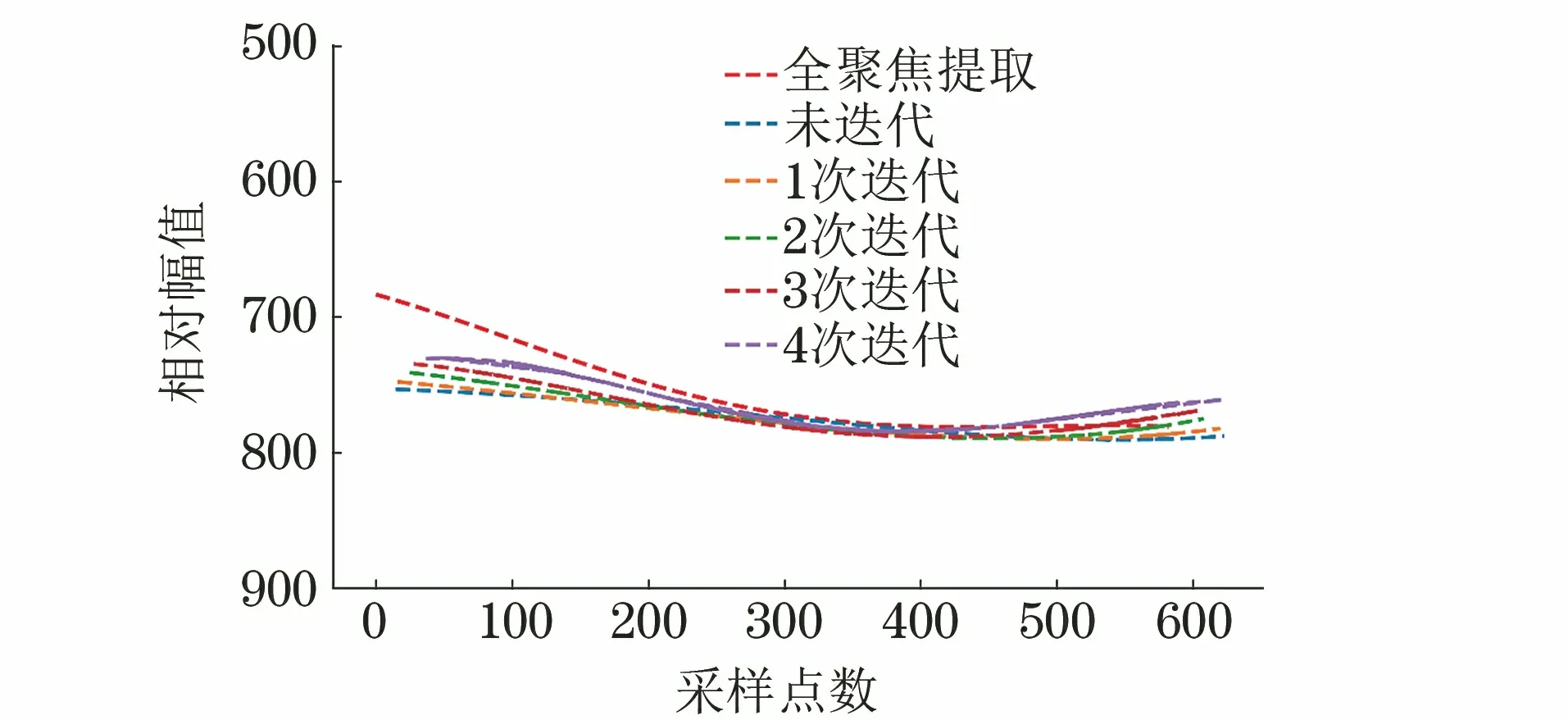
图11 全聚焦与历次迭代提取的轮廓曲线对比

表2 迭代最大误差及平均误差
与全聚焦成像轮廓提取方法相比,自适应仿形在精度上有所损失,但运算量小。试验中的全聚焦成像区域尺寸为100.0 mmX63.9 mm(长×宽),步长为0.1 mm,需要计算的成像点数为640 640,而在自适应仿形中,探头阵元数为64,每次迭代需要计算的点数为63,迭代4次的总点数为315,仅为全聚焦成像点数的0.049%,大大减小了运算量。
5 结语
利用相控阵超声技术、界面检测、迭代优化、脉冲回波仿形技术和最大包络提取进行了曲面的自适应仿形研究。试验结果表明,迭代过程可以降低测量误差,且无需计算声波的传播路径,大大减小了运算量,提高了检测的效率和实时性。
