强风模拟环境下的自动驾驶实车测试
2021-12-11潘新福欧阳涛岳承翰徐龙万金鸣
潘新福,欧阳涛,岳承翰,徐龙,万金鸣
强风模拟环境下的自动驾驶实车测试
潘新福1,欧阳涛1,岳承翰1,徐龙2,万金鸣1
(1.中汽研汽车试验场股份有限公司,江苏 盐城 224100;2.长安大学,陕西 西安 710064)
恶劣天气环境对自动驾驶系统的安全性能具有较大影响。针对自动驾驶汽车在强风环境下行驶安全性的测试验证需求,基于封闭测试场搭建了强风模拟环境,主要由横风测试跑道、横风风机阵列以及其他附属设施构成;然后基于构建的强风模拟环境进行了三种车速、两种风速工况下的自动驾驶汽车强风环境道路测试。测试结果表明,强横风环境下自动驾驶汽车会产生行驶偏移,强风风速越高,车辆行驶偏移越大;强横风对自动驾驶汽车激光雷达目标感知能力影响较小。
自动驾驶测试;封闭测试场;强风模拟;横风风机;目标感知
前言
自动驾驶汽车在强风环境下的行驶安全性是自动驾驶汽车研究与测试过程中的关注重点之一。汽车在强风环境下的行驶安全性是指汽车在强风干扰下保持稳定行驶状态的能力。通常在经过空旷的路面、跨湖跨海大桥、山间隧道的出入口时,汽车会受到强烈的横风干扰。国外有研究表明,普通型轿车以110 km/h的速度行驶时,在横向强风的作用下,车身上的气动力达到了1 112 N。在如此大的侧向气动力作用下,高速行驶的汽车很容易发生侧滑、横摆、甚至侧翻等失稳现象,进而影响到行车安全。相关资料统计显示,每年因交通事故造成的直接经济损失达10亿元,而在这些交通事故中有相当一定的比例是由高速汽车受环境强风影响造成的。此外,强风环境会对自动驾驶汽车各类传感器产生振动,有可能会对自动驾驶系统的感知能力产生消极影响。因此,研究强风环境对自动驾驶汽车行驶安全性的影响具有十分重要的意义。
目前,国内有关学者围绕强风环境下的传统汽车及高速列车的控制性能开展了一些研究[1-2],但对在横风环境下的自动驾驶汽车性能测试开展的研究与测试较为少见。高秀晶等[3]对复杂道路下自动驾驶车辆的横向运动鲁棒控制策略进行研究,通过仿真的手段说明潜在的侧风等环境有可能会对自动驾驶系统产生消极影响。部分研究则聚焦于汽车环境风洞的搭建、测试系统的设计、风洞环境下的传统汽车测试等内容[4-6]。风洞环境下开展自动驾驶安全性能测试需要将自动驾驶汽车静止置于地面或转鼓台上,难以实现基于真实车辆运动特性及自然环境(天气、光照、路面附着系数)的测试评价[7]。
针对该问题,笔者开展了基于封闭测试场的强风模拟系统构建研究,基于封闭测试场完成了真实横风系统的构建,实现了可模拟不同风速的强风环境;并基于构建的强风模拟系统进行了强风模拟环境下的自动驾驶实车测试。
1 封闭测试场强风模拟环境构建
在封闭测试场环境下搭建横风系统,实现封闭测试环境模拟强风系统的构建。强风模拟环境主要由横风测试跑道、横风风机阵列以及其他附属设施构成,其测试段布局要求如图1所示。具体由一条长直线跑道以及放置于跑道旁的横风风机构成,通过横风风机对强风环境进行直接模拟,具备试验条件可控、试验可重复性高、试验结果可靠等优势,可实现自动驾驶汽车模拟强风环境的封闭测试。横风测试场测试跑道需满足在横风风机区域前至少100 m长度内跑道宽度不小于5 m;在横风风机区域后至少100米长度内跑道宽度不小于7 m。另外,测试跑道在横向总宽度内的坡度以及纵向任意50 m之间的坡度需满足不大于2.5%。长直线跑道全长1.4 km,宽16 m,可满足最高时速120 km的实车测试。

图1 强风模拟环境设计方案
横风风机阵列是在道路测试中进行强风环境模拟的关键设施。根据测试需求,横风面长度需大于15 m;风机最大风速需达到20 m/s,相当于自然风等级中的烈风。本文构建的横风模拟系统采用2台风机组成横风风机阵列,横风面总长度超过20 m,单套风机功率300 kW,设计最大风速20 m/s,可模拟最高9级强风。

图2 封闭测试场强风模拟环境
表1 强风模拟环境主要技术指标
序号参数名称参数值 1车道长度/m1 400 2宽度/m>12 3车道数量4 4是否对称布置是 5路面坡度/%<2.5 6设计最高车速/(km/h)160 1风机设计最高风速/(m/s)20 2风机数量/台2 3出风角度/°90
强风模拟环境可对强风进行直接模拟,可进行不同车速和不同风速下自动驾驶汽车经过横风区域后的动态响应测试。测试开始时,自动驾驶汽车以测试车速沿基准行驶线行驶,在接近横风区时进行方向修正使得车辆维持在基准行驶线上;在进入横风区后需保持方向盘固定,并测试从进入横风区开始到以测试车速行驶2 s后为止这段时间内的相关数据。
2 强风模拟环境下的自动驾驶实车测试
本文选取的试验车辆为基于奔腾T99改造的自动驾驶汽车,并进行了测试工况、测试项目的设计。
2.1 测试工况
本文进行三种车速、两种风速工况下的自动驾驶汽车强风环境道路测试,具体测试工况如表2所示。
表2 测试工况
风速/(m/s)车速/(km/h) 1080 100 120 2080 100 120
2.2 测试项目
(1)强风环境车辆动态响应测量,测试自动驾驶汽车在试验工况下的行驶跑偏。
(2)自动驾驶汽车感知系统功能稳定性测试,测试自动驾驶汽车车载激光雷达在试验工况下的目标感知能力。
(3)测试过程:测试进行了6种工况下自动驾驶汽车的行驶跑偏和感知系统目标感知能力测量。试验时车辆在跑道起始端由停止状态开始逐渐加速,达到目标车速后通过由侧风风机吹风形成的侧风区;在此过程中测量车辆的行驶跑偏以及激光雷达对假人目标的感知能力。不同侧风风速通过调节风机输出功率实现。测试现场如图3所示。

图3 测试现场
具体测试过程为:固定风速为20 m/s,顺序进行车速为80 km/h、100 km/h、120 km/h的测试;将风速调整为10 m/s,顺序进行车速为80 km/h、100 km/h、120 km/h的测试。
3 测试结果
(1)强侧风环境行驶跑偏试验结果。
本文测量了各试验工况下自动驾驶汽车通过侧风区后的行驶跑偏距离,测量结果如图4所示。
(2)感知系统目标感知能力试验结果
本次试验进行了自动驾驶汽车顶部激光雷达在不同强风风速下对目标假人的感知及成像测试,测试结果如图5—图8所示。测试结果表明:1)在不同风速、不同行驶车速下,测试车辆通过侧风区后均出现明显的行驶偏移;在当前试验条件下,强风风速越高,车辆行驶偏移越大;同一风速下,车速越低,行驶偏移越大。2)在不同强风风速、不同行驶车速下,测试车辆搭载的激光雷达均可成功感知假人目标,在当前试验条件下,强风环境对自动驾驶汽车激光雷达目标感知能力影响较小。因此可以认为强风环境会显著影响自动驾驶汽车运动状态,在设计自动驾驶系统决策控制方法时应系统考虑潜在的横风对自动驾驶系统安全性能的影响。

图4 各工况侧向偏移距离

图5 激光雷达成像结果:风速10 m/s,车速80 km/h

图6 激光雷达成像结果:风速10 m/s,车速100 km/h
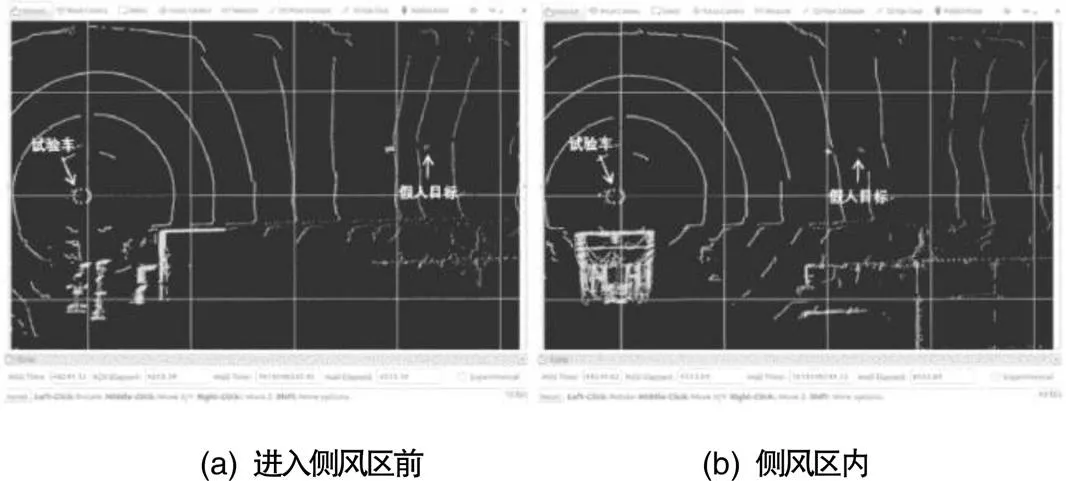
图7 激光雷达成像结果:风速10 m/s,车速120 km/h

图8 激光雷达成像结果:风速20 m/s,车速80 km/h

图9 激光雷达成像结果:风速20 m/s,车速100 km/h

图10 激光雷达成像结果:风速20 m/s,车速120 km/h
4 结语
自动驾驶汽车在强风环境下的行驶安全性是自动驾驶汽车研究与测试过程中的重点关注内容之一,围绕强风环境下的自动驾驶汽车行驶安全性测试需求,本文基于封闭测试场搭建了强风模拟环境,并基于构建的强风模拟系统进行了横风环境下的自动驾驶动态响应与感知系统稳定性实车测试。测试结果表明,强横风环境下自动驾驶汽车会产生行驶偏移;强横风环境对自动驾驶汽车激光雷达目标感知能力影响较小。受试验条件所限,目前的测试工况仍较为简单,下一步将研究建立强风模拟环境下的自动驾驶测试规程,并基于实车测试系统研究强风对不同自动化等级自动驾驶系统的影响。
[1] 田林,许金良,张莹.横风作用下载重汽车在复杂路段运行的安全模型[J].长安大学学报(自然科学版),2015,35(03):21-26.
[2] 李德仓,孟建军,胥如迅,等.强风下高速列车滑膜自适应鲁棒H_∞控制方法[J].铁道学报,2018,40(07):67-73.
[3] 高秀晶,陶林君,黄红武,等.复杂道路下自动驾驶车辆的横向运动鲁棒控制策略[J].汽车安全与节能学报,2020,11(04):454-461.
[4] 王磊,梁婷,郭瑞庭,等.汽车环境风洞试验室的发展与应用[J].科技创新导报, 2020,17(02): 88-89+95.
[5] 周猛,付东翔.基于回归分析法的汽车散热试件风洞测控系统[J].电子测量技术, 2019,42(15):88-92.
[6] 袁志群,吉斯汉,谷正气,等.某带附加台架汽车模型风洞试验精度验证[J].汽车工程,2018,40(02):156-161.
[7] 王润民,张心睿,王由道,等.自动驾驶封闭测试场地建设技术研究与实践[J].汽车实用技术,2020(04):33-36.
Automatic Driving Field Test under Strong Wind Simulation Environment
PAN Xinfu1, OUYANG Tao1, YUE Chenghan1, XU Long2, WAN Jinming1
( 1.CATARC Automotive Proving Ground Co., Ltd., Jiangsu Yancheng 224100;2.Chang’an University, Shaanxi Xi’an 710064 )
Severe weather environment has great influence on the safety performance of automatic driving system. In view of the test and verification requirements for the safety of automatic vehicle under strong wind environment, a strong wind simulation system was built in a closed test field. The strong wind simulation environment is mainly composed of cross wind test runway, cross wind fan array and other ancillary facilities. Then, under the condition of three kinds of speed and two kinds of wind speeds, the performance test of the automatic vehicle was carried out by using the strong wind simulation environment. The test results show that the driving deviation of the automatic vehicle under strong crosswind will increase. Strong cross wind has little effect on the target detection ability of automatic vehicle base on lidar.
Automatic driving test;Closed test field;Strong wind simulation;Cross fan;Target detection
A
1671-7988(2021)22-28-04
U495
A
1671-7988(2021)22-28-04
CLC NO.:U495
潘新福,高级工程师,就职于中汽研汽车试验场股份有限公司,研究方向a:智能网联汽车测试、汽车道路试验。
10.16638/j.cnki.1671-7988.2021.022.007
