一种小型船舶自动扫舱机控制系统概述
2021-12-09张青岱丘锐聪吴佳劲杨泽涛邹易余杨勇森袁建斌广东海洋大学
张青岱 丘锐聪 吴佳劲 杨泽涛 邹易余 杨勇森 袁建斌 广东海洋大学
通讯作者:袁建斌
1.前言
根据波罗的海航运交易所,Clarksons,上海国际航运研究中心整理显示,截止2020年4月初,国际干散货船队运力共计12038艘,8.86亿载重吨。干散货船是用以装载无包装的大宗货物的船舶,专用于运送煤炭、矿砂、谷物、化肥、水泥、钢铁等散装物资。在运输过程中,如果相邻两航次装载不同种货,在下次装货之前货舱要经过严格的清洗,即扫舱又称备舱。目前,对散货船货舱进行扫舱作业普遍采用人工作业的方式。由工作人员手持高压消防设备,在强压作用下将水喷向大舱室表面,经常需要登高做作业。
1.1 干散货船洗舱作业制约因素
干散货船洗舱作业受到以下方面因素限制:①人力资源限制。一艘远洋船舶配员一般二十人左右,除去正常船长、轮机长和正常值班人员,可以参加航行中扫舱工作的人员为7-8名,而船东或租家也不太可能为了洗舱作业的需求,而额外雇用人员上船协助洗舱。②恶劣天气下,船员要在没有升降梯,并且船体摇晃剧烈的情况下来完成洗舱工作,危险系数比较高。3)大舱结构及环境影响,如图1所示。船舶货舱高度(从舱底板到舱口围)约为十几米至二十几米,货舱前后左右四面的舱壁几乎成直角,四周斜坡高度约3米多高;货舱左右两旁的舱壁无任何可以站人或固定的地方,货舱前后两面的舱壁除了直梯附近及澳洲梯内部外,同样无任何可以站人或固定的地方。

图1 货舱舱壁图片
1.2 干散货船扫舱作业的方式
目前干散货船扫舱主要以人工清洗方式为主,如图2所示。前、后、左及右舱壁的垂直面。舱壁的垂直面的高处以采取两人一组,并运用三段式的铝制伸缩梯为踏板,而水手则站在伸缩梯上,同时再运用铝制伸缩杆的海绵刷或自行利用长竹杆组装而成的海绵刷来进行货舱高处洗舱作业,而其下方再由另一名水手协助固定。

图2 人工高空扫舱
2.自动扫舱机控制系统
为了降低人工扫舱作业时的作业风险提高船员工作的舒适度等问题,拟研发一种自动扫舱机,现就其控制系统进行介绍。
自动扫舱机控制系统是其神经中枢,负责控制设备的行走、转向及船舱室表面清洗工作,同时反馈现场传感器采集的信号并进行处理。控制系统的功能就是对组成自动扫舱机的各分系统进行协调和控制,同时完成各系统状态的监视和显示。
运动控制是自动扫舱机最低控制的主要内容之一,主要内容包括前进控制、高度控制、速度及方向控制以及定位控制等。其中前进控制指控制从舱室地面到自动扫舱机重心的垂直距离,高度控制目标为控制从舱室地面到自动扫舱机重心的垂直距离、速度方向控制要实现自动扫舱机速度控制以及方向。主要闭环控制包括,前进回路、高度回路和方向回路等,自动定前、自动定高和自动定向是这些闭环回路简称。
2.1 速度与方向控制回路
自动扫舱机的速度与定向控制均属于水平面内的控制,可暂时忽略垂向运动的影响。水平速度一般以纵向速度u作为被控量构成闭环控制系统。具体而言,速度控制是指在自动扫舱机控制器作用下能够按照设定的标准速度运动,其运动过程起始段为变加速运动,一旦实际运动速度达到给定速度值便保持该速度做匀速直线运动。
在速度控制回路中(如图3 所示),速度反馈是一重要环节,采用多普勒声学测速原理获得自动扫舱机相对于大舱室的速度,也就是自动扫舱机的固定坐标系下的速度。对测得的速度进行积分即可以得到自动扫舱机的计算行程。构成速度闭环后可以较为精确地控制自动扫舱机在大舱室中的行走速度。

图3 自动扫舱机定速控制回路
与速度控制回路类似,自动扫舱机的方向控制回路(如图4所示)能够使自动扫舱机自动保持给定的方向,其回路结构类似于自动前行控制结构,而且扫舱机定向可以使用罗盘来进行方向调整,实践中在改善系统的闭环控制性能方面十分有效。
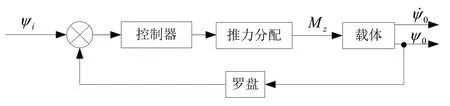
图4 自动扫舱机定向控制回路
自动扫舱机在单自由度控制时,可以单独对速度控制或对方向的控制与前进控制方法类似,在不考虑其他自由度上的耦合作用没有外界任何扰动时,单一自由度上的运动应用大部分常规算法都能够取得比较理想的控制效果;但是自动扫舱机是一个极为复杂的系统,系统自身非线性、强耦合等特点,再加上其工作环境的外界情况,使得如果考虑自动扫舱机的两个及其以上的自由度的运动,自动扫舱机的控制效果将会大大降低,如果再加上海况的影响,则情况会更加恶化,出现不稳定的情况。
2.2 自动扫舱机前进控制回路与定高控制回路
前进控制与定高控制在自动扫舱机的结构上是完全相同的,如以长度计作为反馈元件,就称为自动前进控制,若以高度计构成反馈回路就是自动定高控制,两种回路不同时使用。考虑到稳心较高,一般不会产生大的偏向,故可以去掉速度反馈环节,而直接由长度计或高度计作为闭环,采用高度计作为闭环反馈时的定高控制回路(如图5所示)。
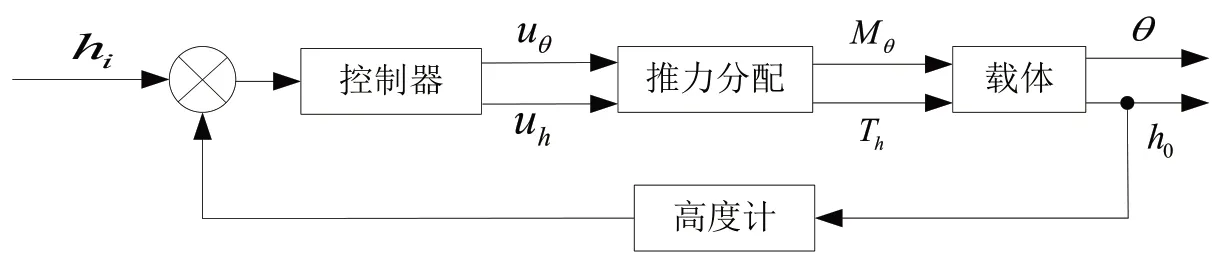
图5 自动扫舱机自动定高控制回路
定位控制是扫舱机准确的进入某个平面位置并维持该位置称为定位控制,也称为动力定位,指在水平面内闭环系统中两维空间的自动定位,即自动扫舱机在平面内保持位置量和以及位置角度量不变(如图6所示)。
由图6可以看到,自动扫舱机的定位控制与单一自由度运动控制不同之处在于,定位控制是多个单一自由度运动的联合控制,需要考虑相关自由度间的耦合。

图6 自动扫舱机三自由度定位示意图
3.自动扫舱机远程遥控系统的总体框架
控制系统是应用于船舶大舱室扫舱的自动扫舱机的重要组成部分,其负责完成对自动扫舱机的行走、转向和扫舱作业功能的控制,保证扫舱机的预设和操作反馈的保持一致。
综上对扫舱机的控制系统的要求:由于船员的工作强度大且海上工作环境的特殊性,在控制系统的研究方面可以类似使用无人机的遥控模式进行控制。扫舱机的控制是具有程序性和指令性双重标准,当扫舱时在2-3s的时间内需要做出多个指令时,应当需考虑把重要且常用的多个指令集中在同一个控制面板上,不能在把指令集中在多个控制面板,以防止操作的连贯性与及时性不好,扫舱机在扫舱作业时要承担多种任务角色,为了能够最大程度的把扫舱机的经济价值发挥出来,在扫舱机行走、转向、扫舱清污、污水的回收处理等功能的控制,应当设计高的系统要求,这样才把对多个任务的控制和转换安全顺利的完成。但是,为了完成不同的扫舱任务,扫舱机需要携带的负载设备多种多样。扫舱之前如果增加的负载过多,会引起的磁力吸附不足使扫舱机坠落,引发危险和下方有人时造成船员伤亡的事故。因此在对控制系统研究应当选用远程遥控装置。
现今,随着我国国内5G通信网络技术的蓬勃发展,无线控制技术也有了很大的变化,而常见的控制方式分为有线控制和无线控制。为了保证自动扫舱机能够在远程遥控的情况下顺利完成扫舱清洗任务,选择合适的控制方式至关重要。
由表1中优缺点的对比,海上环境特殊性以及船员安全性的综合考虑采用无线控制方式对自动扫舱机实现远程控制。
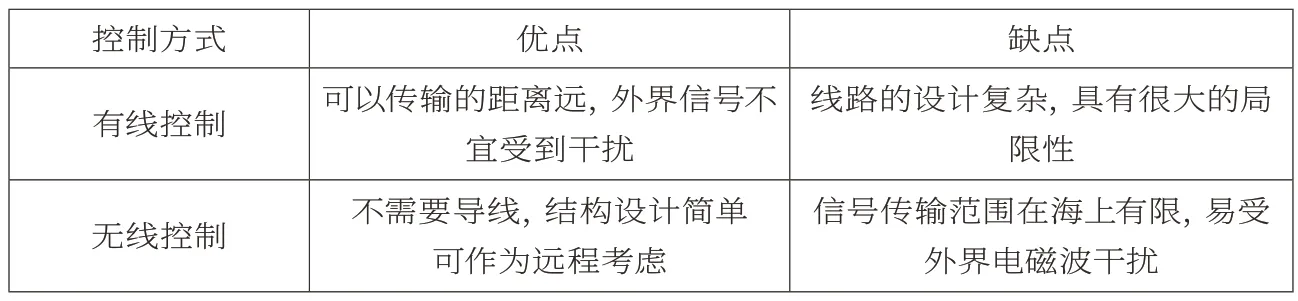
表1 自动扫舱机控制方式的优缺点
扫舱机的逻辑运行是通过接收器将移动APP控制的扫舱机动作信号进行接收,动作指令传到扫舱机控制器是通过智能手机遥控逻辑回路,对动作信号的逻辑判断通过控制器进行,一步一步将最终的控制指令通过逻辑回路发送至伺服电机的驱动器,让其运动,从而达到精准控制扫舱机的按照预先设定的路线行走。
通过手机就可以让船员控制自动扫舱机的实时动作和移动状态,具有方便快捷的功能,非常地实用。为了能够按照预先设定好的指令移动是控制系统的研发首要保证,这是最核心且基本的要求。远程遥控系统是用智能手机移动APP的界面控制将讯息传递给扫舱机的接收装置;通过移动APP软件作为远程控制系统的智能核心,其负责指令的执行及程序的控制。信号的接收和发出,其功能包括对扫舱机伺服电机的转速、转向、位置以及对摇摆机构进行控制、对超高压水射流装置的出水压力的控制等。
控制系统的控制命令需要通过APP软件的程序控制来获得。自动扫舱机移动APP功能:完成移动APP的界面布局以及功能程序设置,远程实时控制是通过该APP软件对自动扫舱机的动作进行主要的控制。
4.结论
随着自动化技术的发展,智能产品不断诞生,改变了人们的生活和生产方式,本文就小型船舶自动扫舱控制系统提出了一些想法,希望在后续的学习中不断地去完善和修改,能够早日应用到扫舱作业中去,改善船员的工作条件,提高安全性和舒适性。