基于双域分解的夜间车辆红外图像研究
2021-12-07胡文浩吴卓鸿杨昊钧
魏 亮,王 炎,胡文浩,吴卓鸿,杨昊钧
(1.云南云通司法鉴定中心,云南 昆明650255;2.国家市场监督管理总局缺陷产品管理中心,北京 100101;3.北京航空航天大学交通科学与工程学院,北京100101)
1 引 言
交通监控系统属于智能交通的核心手段之一,通过交通监控系统监管车辆,能够实现车辆交通的全天候管理。在现实应用中,交通监控系统所采集的交通红外偏振图像受低能见度(夜间)条件限制,获取的红外偏振图像清晰度较低,这对夜间车辆交通监控存在干扰[1]。
目前已有大量学者专题研究图像增强问题,王峰萍等人提出基于改进Retinex的城市交通图像增强方法,提高图像具有色彩保真的优势,但增强的图像存在光晕问题[2];曹锦纲等人提出基于生成式对抗网络的道路交通模糊图像增强方法,增强后图像细节性显著,但是生成图像和原始图像相比存在差距,网络结构和调整参数还需优化[3]。
为解决传统方法存在的问题,提出基于双域分解的夜间车辆交通红外偏振图像增强方法,以提升夜间车辆交通红外偏振图像质量。
2 基于双域分解的夜间车辆交通红外偏振图像增强方法
2.1 改进的 Retinex 低照度图像光照补偿算法
因夜间车辆交通红外偏振图像采集于夜间,这对夜间车辆交通红外偏振图像增强效果存在一定影响[4-5]。为此,本文把原始的夜间车辆交通红外偏振图像在RGB空间变换至Lab颜色空间,色度分量a与b保持原始状态,使用改进的Retinex算法处理亮度分量L,以此保证夜间车辆交通红外偏振图像色彩具有恒常性,优化边缘模糊性。通过全局矫正方法,对图像完成线性拉伸,将拉伸后图像变换至RGB空间实现光照补偿[6]。
2.1.1 RGN空间和Lab空间变换
RGB空间无法直接变换至Lab空间,需先变换到XYZ空间后再变换至Lab,则RGB-XYZ-Lab。夜间车辆交通红外偏振图像自RGB至XYZ的变换方法为:
(1)
其中,

(2)
式中,N为变换矩阵。夜间车辆交通红外偏振图像自XYZ空间至Lab空间的转换方法为:
(3)
式中,g代表变换函数;X1、Y1、Z1分别代表X、Y、Z分量归一化值。
2.1.2 亮度分量估计
传统Retinex算法利用高斯滤波估计图像的亮度分量,图像边缘处将存在泛白、光晕问题[7]。本文使用引导滤波方法估计夜间车辆交通红外偏振图像亮度分量:
R(φ,φ)=lgL(φ,φ)-lgK(L(φ,φ))
(4)
式中,R(φ,φ)为亮度分量;L(φ,φ)为原始图像变换至Lab空间后的反射分量;K为引导滤波函数。
变换后的输出图像pj为:
(5)
式中,J为图像引导系数;qj为输入图像;Vij表示权重。引导滤波可输出局部线性算子:
G=φkpj
(6)

(7)
(8)
式中,Kj(L(φ,φ))为引导滤波函数处理后图像。把式(8)导进式(4)便可以获取反射图像R(φ,φ)。
2.1.3 全局矫正
使用式(9)对R(φ,φ)线性量化,让图像对比度变换至能够显示的区域中,实现图像光照补偿:
(9)
式中,R(φ,φ)即为光照补偿矫正后夜间车辆交通红外偏振图像。
2.2 基于双域分解的图像增强算法
2.2.1 双边滤波器
与高斯滤波器对比,双边滤波器降噪性能显著,边缘轮廓留存性能显著[9-10]。双边滤波器分解噪声的方法为:
(10)
(11)
图像R(φ,φ)通过双边滤波器滤波后,可获取低频图像gL与高频图像gH,具体如下式所示:
(12)
2.2.2 低频图像去雾
使用雾霾天气退化模型抑制低频图像基础层的雾气,获取无雾的低频图像gL:
gL=go×Rx+B[1-Rx]
(13)
式中,go、Rx、B依次为去雾后低频图像、透射率、周围环境大气光。
无雾的低频图像里存在某个颜色通道灰度值为较小[11]。因此,无雾的低频图像存在式(14)的暗原色Idark:
(14)
式中,d为颜色通道;Id为颜色通道的颜色向量。

(15)
(16)
去雾后低频图像的颜色通道的颜色向量Id为:
(17)
如果去雾后低频图像灰度最大值为gLDHmax;最小灰度值为gLDHmin,那么利用Gamma变换方法实现低频图像增强。增强后低频图像为:
(18)
2.2.3 高频降噪与增强
夜间车辆交通红外偏振图像存在大量噪声,增强高频图像gH之前需要去噪,若不去噪,直接增强将会放大噪声[12-14]。
采用非下采样剪切波变换分解高频图像gH。获取gH剪切波变换域的分解系数gHCj,l,对gHCj,l收缩处理,获取基础收缩系数gHC1:
(19)

且噪声点标准方差ρ的计算方法为:
(20)
式中,Vd1是高频子带系数。
将gHB完成分解,通过gHB的分解系数矩阵集CEC2将gHCj,l完成最终收缩,获取噪声抑制后收缩系数集gHC2,将gHC2进行非下采样的剪切变换,获取去噪后高频图像gHD:
(21)
gHD的高频纹理细节增强和边缘检测算子存在显著关联性,一阶微分算子提取的边缘信息效果显著,但不具有明确方向性,无法获取非规则边缘[15]。为有效获取非规则边缘信息,使用二阶微分算子,获取gHD边缘信息并增强。
(ao-1,bo)-gHDj,l(ao-1,bo-1)-gHDj,l(ao+1,bo-1)-4gHDj,l(ao+1,bo)-gHDj,l(ao+1,bo+1)
(22)
式中,ao,bo依次是分解系数矩阵行数与列数。
2.2.4 图像合成与模糊抑制
联合gLE、gHD合成增强图像gOE,使用模糊抑制算子,抑制gOE模糊性,获取最终增强图像gDE:
gDE=(gOE)Ωd+ψd
(23)
式中,Ωd,ψd分别为颜色比例因子、色彩调整因子。
3 实验分析
实验环境为Matlab R2019a编程,电脑配置为:处理器Inter(R)Core(TM)i7,主频与内存依次是3.0 GHz、8 GB,实验对象为某停车场夜间车辆。
3.1 图像光照补偿效果
图1为某停车场夜间车辆红外偏振图像,从视觉角度分析可直观看出,此图像光照不足,图像细节信息不显著,使用本文方法对其进行图像光照补偿,补偿效果如图2所示。

图1 某停车场夜间车辆红外偏振图像Fig.1 Infrared polarization image of vehicles in a parking lot at night

图2 本文方法应用后Fig.2 After the application of the proposed method
从主观视觉角度分析图1与图2可知,本文方法对图1进行光照补偿后,该停车场夜间车辆红外偏振图像视觉效果更佳,可清晰看出各个车辆停靠位置。
3.2 图像增强效果
使用本文方法对夜间车辆红外偏振图像进行图像增强,以图2为例,为验证本文方法增强效果,以文献[2]方法提出的基于改进Retinex的城市交通图像增强方法、文献[3]提出的基于生成式对抗网络的道路交通模糊图像增强方法为对比方法,对比三种方法对夜间车辆交通红外偏振图像的增强效果,结果如图3所示。



图3 三种方法增强效果视觉对比图Fig.3 Visual contrast of three methods for enhancing effect
三种方法对同一个夜间车辆交通红外偏振图像增强后,差异较为明显。对比之下,本文方法增强后图像的视觉效果最好,夜间车辆交通红外偏振图像中细节清晰,文献[2]方法增强后图像存在光晕问题,文献[3]方法虽然不存在光晕问题,但是增强后图像的视觉效果劣于本文方法。由此可知,从视觉角度分析,本文方法增强后夜间车辆交通红外偏振图像更具优势。
为深入验证本文方法增强效果,通过亮度均值O1、标准差O2、信息熵O3测试三种方法应用性能。已知某夜间车辆交通红外偏振图像亮度均值是50。
(1)亮度均值
(24)
式中,L(i,j)、ao、bo分别为夜间车辆交通红外偏振图像像素点(i,j)亮度、行数、列数。
三种方法增强后夜间车辆交通红外偏振图像的亮度均值越大,代表图像整体偏亮;亮度均值较小,代表夜间车辆交通红外偏振图像整体偏暗。亮度均值越大,代表图像增强效果越好。三种方法增强后,夜间车辆交通红外偏振图像的亮度均值对比结果如图4所示。

图4 亮度均值对比结果Fig.4 Comparison results of brightness mean
根据图4可知,三种方法增强后夜间车辆交通红外偏振图像的亮度均值之间差异显著,本文方法增强后的夜间车辆交通红外偏振图像亮度均值高达115,文献[2]方法、文献[3]方法增强后的夜间车辆交通红外偏振图像亮度均值均低于80,文献[2]方法、文献[3]方虽然也提高了原始夜间车辆交通红外偏振图像亮度,但是提升效果没有本文方法显著。
(2)标准差
(25)
标准差能够描述夜间车辆交通红外偏振图像的对比度,标准差较大,夜间车辆交通红外偏振图像对比度显著,图像增强效果较好。三种方法增强后,夜间车辆交通红外偏振图像的标准差对比结果如图5所示。

图5 标准差对比结果Fig.5 Standard deviation comparison results
图5中,三种方法对比之下,本文方法对夜间车辆交通红外偏振图像增强后,标准差大于40,文献[2]方法、文献[3]方法增强效果不如本文方法,标准差低于40,对比之下,本文方法增强下,夜间车辆交通红外偏振图像对比度得以提升,效果更佳。
(3)信息熵
(26)
式中,gHI为灰度级概率值。
信息熵可描述图像信息量,信息熵较大,表示图像信息量较多,信息熵较小,表示图像信息较小;信息熵较小,则增强图像后信息出现流失,增强效果较差。三种方法增强后,夜间车辆交通红外偏振图像信息熵对比结果如图6所示。
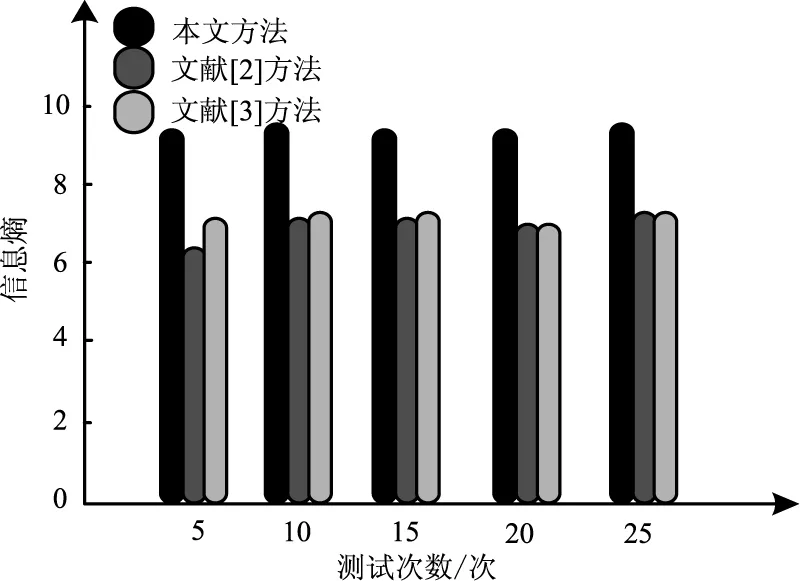
图6 信息熵对比结果Fig.6 Comparison results of information entropy
图6中本文方法对夜间车辆交通红外偏振图像增强后,图像信息熵大于9,相比之下,文献[2]方法、文献[3]方法增强后,夜间车辆交通红外偏振图像的信息熵较小,本文方法增强效果更佳,图像细节信息更丰富。
4 结 论
本文针对夜间车辆交通红外偏振图像,提出基于双域分解的夜间车辆交通红外偏振图像增强方法,此方法可以有效实现夜间车辆交通红外偏振图像增强。通过实验测试,本文方法相比于传统方法,可以更好地保持图像细节信息,对夜间车辆交通红外偏振图像具有更显著的增强效果,使用价值显著。