无人机航测像控点布设对空三精度的影响研究
2021-12-07李金忠王旭东
何 磊,李金忠,王旭东
(1.青海煤炭地质局物探测量队,青海 西宁 810001; 2.青海省煤炭地质勘查院,青海 西宁 810001)
无人机测绘在特殊地区遥感影像获取和数据快速处理成图有着极其重要的现实意义,在国民经济建设中发挥着重要作用[1-3]。在低空无人机摄影测量作业中,像控点布设及数据处理是正射影像制作的重要环节,关于像控点布设与正射影像结果精度的研究诸多,罗东山等[4]研究了像控点数量由少到多变化、像控点布设位置变化两种情况下空三精度的变化;李万能等[2]在基于传统像控点布设的研究中,结合野外测量干扰因素,提出按传统摄影测量规范布设和测量的情况下会增加工作难度;吴海兵等[5]提出无人机航测现状中的测量规范和像控点布设的要求不明确、缺乏统一的规范。所以,在保证测量精度的前提下,合理安排像控点布设数量,可以减少野外工作量。本文以摄影测量加密原理为基础,从控制点的角度出发,通过对5种无人机控制点布设方案进行空三精度对比实验,从而选取一种适合小区域、影像幅面小的无人机航测最优控制点布设方案,对探究无人机摄影测量成图精度及4D产品的生产有一定的参考价值。
1 外业航测数据采集
1.1 研究区概况
研究区位于青藏高原东北部,地处湟水及其支流南川河、北川河交汇处,湟水中游河谷盆地。地势西南高、东北低,四周群山怀抱,平均海拔约2 300 m。测区面积约1 km2,东西走向约1.1 km,南北走向约0.9 km,基本地形为西高东低地势缓和,无高大建筑,适合无人机航测数据的获取并开展相关研究。
1.2 无人机航空摄影
依据国家标准CH/Z 3005—2010《低空数字航空摄影规范》[6]要求,航向重叠度一般应为60%~80%,最小不应小于53%;旁向重叠度一般应为60%。本研究将航向重叠率设置为80%,旁向重叠率设置为70%[7]。无人机航测共5个架次,27条航带,飞行时间约70 min,拍摄照片1 503张。飞行航摄区域包含了整个测区,无漏测补测情况发生。
2 像控点布设方案及空三处理
2.1 无人机航测像控点布设方案
根据GB/T 7930—2008《1∶500 1∶1 000 1∶2 000地形图航空摄影测量内业规范》的精度[8]要求,本次研究结合研究区实际情况,按照像控点从少到多均匀布设的思路进行设计,对不同像控点的方案使用同样的软件和方法进行处理,探讨不同数量的像控点布设方案对空三加密后图像点位精度的影响。像控点选择全野外布点方案,分别以无像控点、3个像控点、5个像控点、7个像控点和10个像控点5种选点方案进行布设。通过实地踏勘,选择41个清晰可辨的地物特征点作为检测点,通过GPSRTK测量41个检测点位平面坐标及高程,将其GPSRTK测量数据作为真值,用于数据对比。
2.2 基于Pix4D的空三处理
本次实验的空三处理采用瑞士Pix4D公司研发的Pix4D mapper软件,该软件可应用于无人机采集数据、航拍、测量等流程,为专业进行无人机影像后处理的软件[9]。基于Pix4D的空三处理步骤:
(1)野外航拍完成后对无人机拍摄的图像进行拼接,将航测所得测区航片导入Pix4D mapper软件,同时根据不同控制点布设方案导入相应数量的像控点数据,进行图像拼接,拼接结束后将明显变形的航片删除并重新拼接。
(2)在拼接过程中需对图像处理参数进行设置,结合测区实际,东坐标、北坐标精度限制为0.1 m、输出坐标系为独立坐标系、中央子午线精度设置为102°。根据布设方案所选取的控制点进行航片刺点后进行图像处理。
(3)为了提高空三精度,在处理时需对图像进行空三加密处理,基于获取的POS数据完成空三加密后重新匹配优化(图1),并生成点位精度质量报告。
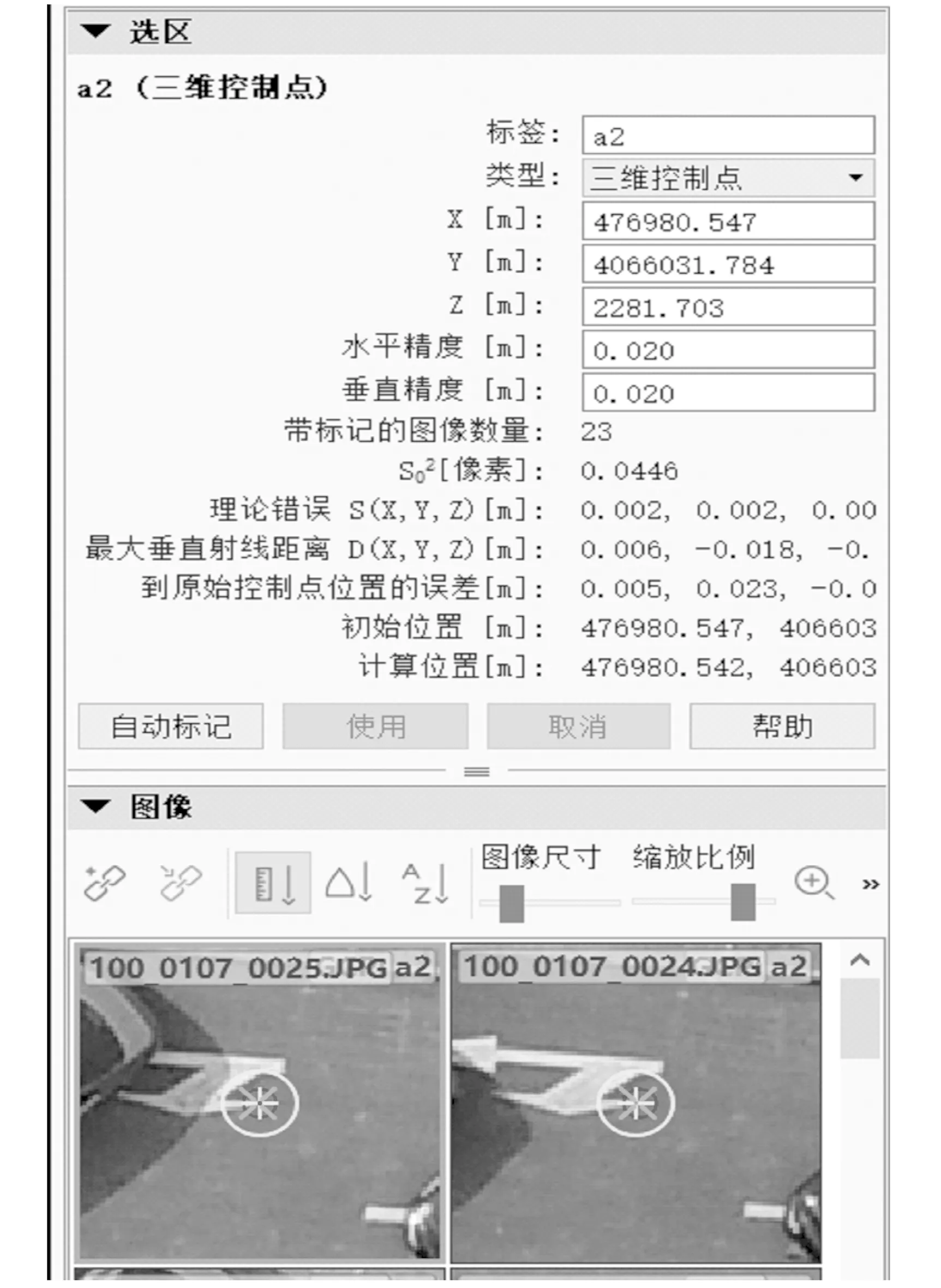
图1 空三加密过程Fig.1 Process of aerial triangulation
3 空三精度分析
中误差是反映地形图数学精度的一个重要指标[10]。本研究选取的41个检测点作为精度评价的基础数据,以中误差(包括点位平面中误差和点位高程中误差)作为精度评价的指标,GPS测得的点位坐标作为真值。中误差计算公式:
式中:Δ为量的真误差,[]为求和符号,n为观测值个数,m为中误差。
以无像控点方案作为初始对照数据,与不同像控点布设方案下空三加密后的点位精度进行对比(表1~表5),不同像控点布设方案下的精度点位误差数据见图2和图3。
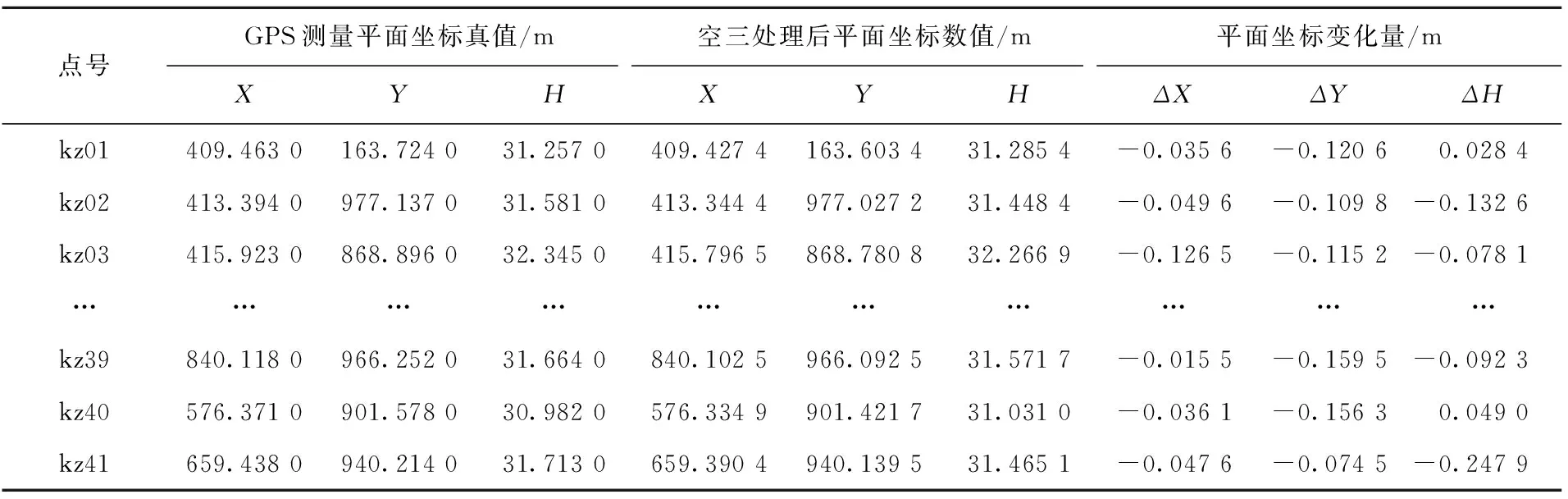
表1 无像控点平面数据Tab.1 Plane data of no-image control points
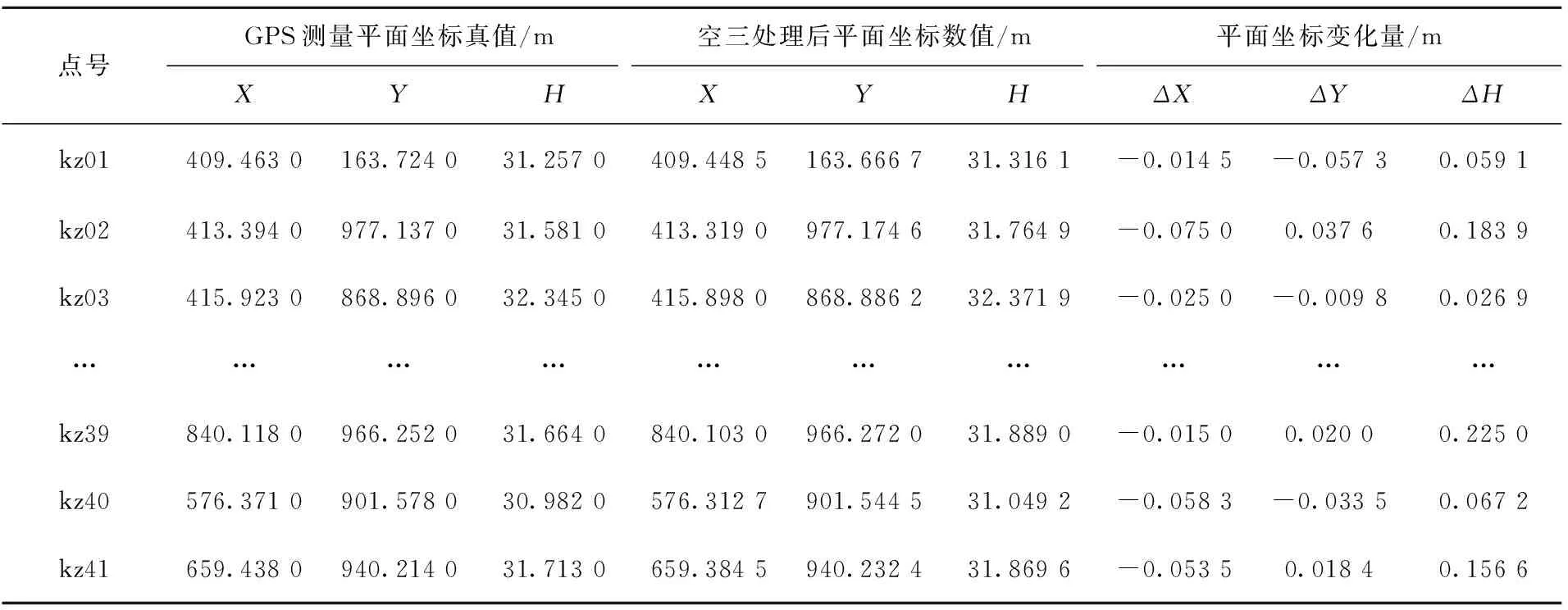
表2 3像控点平面数据Tab.2 Plane data of 3-image control point
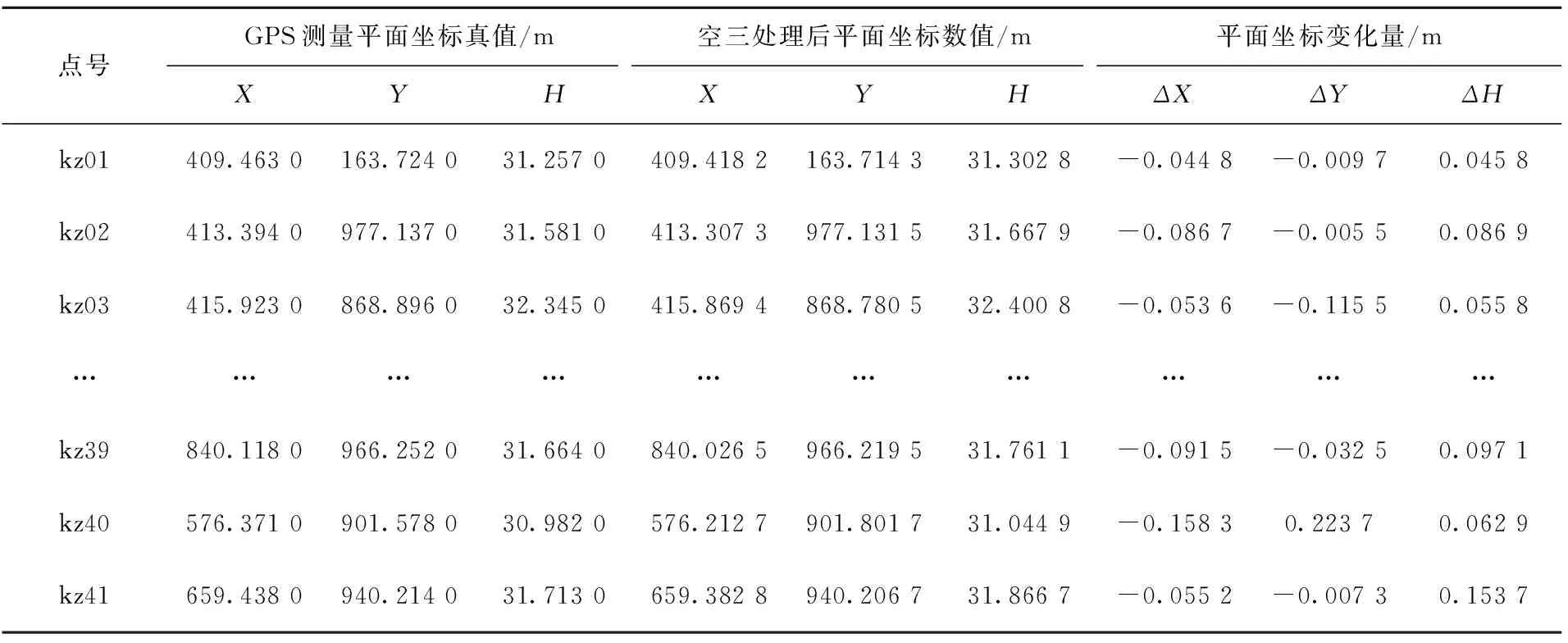
表3 5像控点平面数据Tab.3 Plane data of 5-image control point
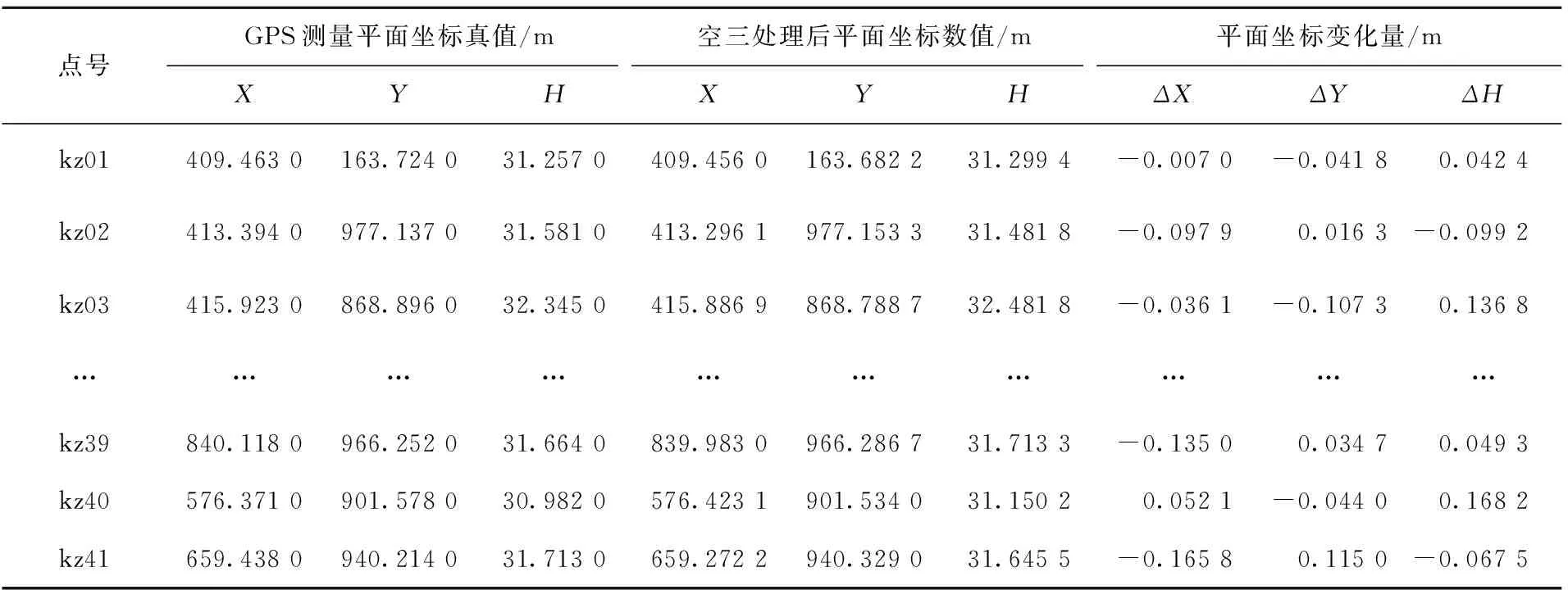
表4 7像控点平面数据Tab.4 Plane data of 7-image control point
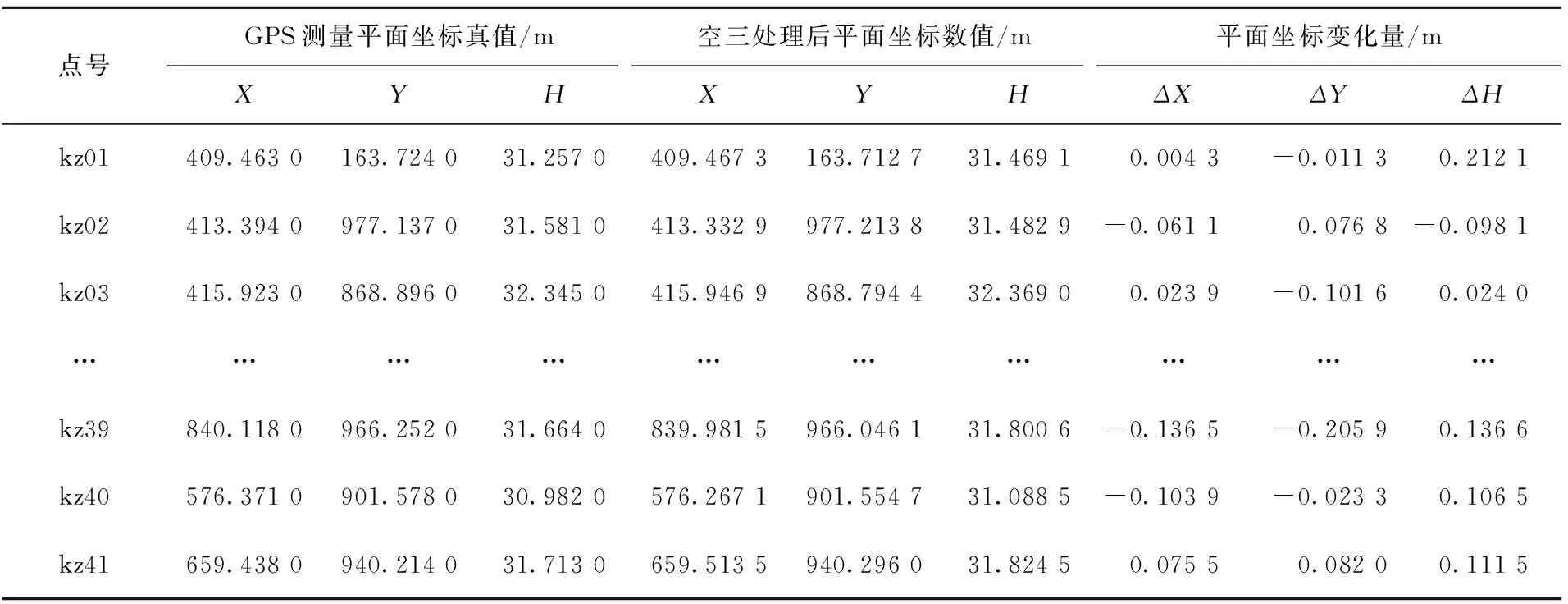
表5 10像控点平面数据Tab.5 Plane data of 10-image control point
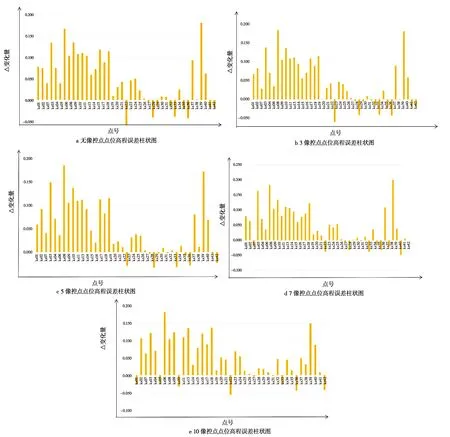
图3 不同像控点布设方案下的点位高程误差柱状图Fig.3 Histogram of point elevation error under the different layout schemes of image control points
根据GPS测量的坐标真值与5种布设方案的检查点的坐标值计算得到坐标变化量,利用上述公式计算出5种方案的中误差,得出不同像控点布设方案下的平面坐标中误差和高程中误差。
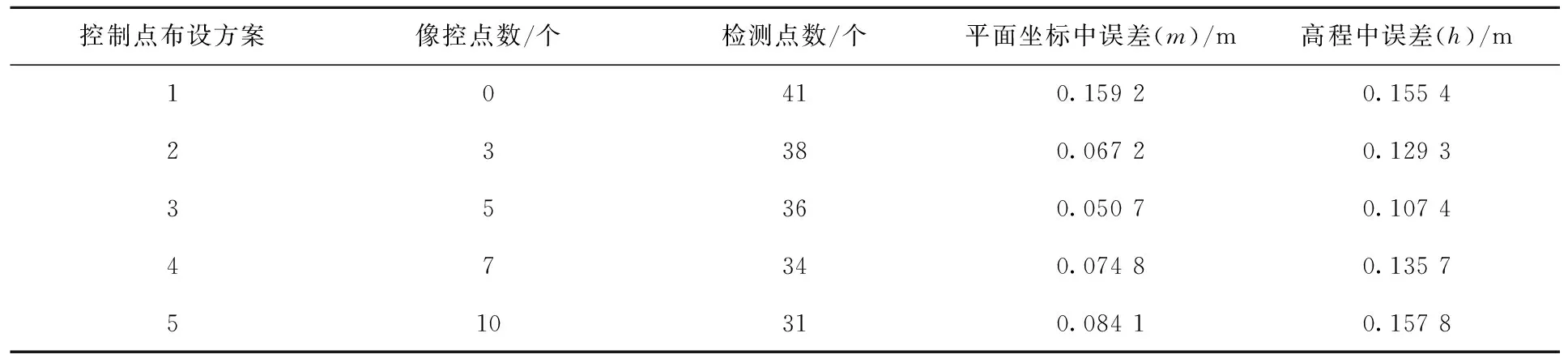
表6 不同像控点布设方案的中误差计算成果表Tab.6 Mid-error calculation of different layout schemes of image control points
根据GB/T 7930—2008《1∶500 1∶1 000 1∶2 000 地形图航空摄影测量内业规范》[8],1∶1 000比例尺地形图平面坐标限差为0.6 m,高程限差为0.2 m,结合上述误差柱状图和中误差计算可得,当无像控点时,特征点平面精度较低;添加3个像控点后,精度明显提升,点位中误差为m3=0.067 2 m,高程中误差h3=0.129 3 m;当布设5个像控点时,达到本次实验五种方案的最高精度,中误差为m5=0.050 7 m,高程中误差h5=0.107 4 m;当布设7个像控点时,精度下降,点位中误差为m7=0.074 8 m,高程中误差h7=0.135 7m。当布设10各像控点时,空三精度继续下降。
4 讨论与结论
无人机影像处理的精度取决于空三解算精度,当像控点较多时,软件的数据处理量较大,当在测区边缘地带布设4个像控点,有利于保证区域内部精度[11]。像控点个数减少后,既减少了外业工作量,又缩短了内业数据处理的时间,提高了工作效率[12]。本文通过41个检查点平面和高程中误差计算可知,当像控点个数为5时,像控点均匀分布在研究区内,空三精度达到最高,平面中误差为m5=0.050 7 m,高程中误差h5=0.107 4 m。当像控点增多时,在空三解算时,刺点精度随之下降,导致空三精度下降[13]。由于本次实验是在一定的试验条件下进行的,实验的普遍性有待进一步验证。
在小地区低空航摄测量中,像控点数量与空三精度的关联度不是很高,在1 km2范围内5个像控点均匀布设,可满足无人机航测大比例尺测图精度。