3D GIS环境下摄像头智能布控研究
2021-12-06罗松飞刘康康
罗松飞 刘康康
摘要:3D GIS环境下摄像头智能布控是以校园三维数字地图为基础,结合摄像头监控模型,定义最大有效监控区域,再根据选定的待监控区域,反向计算出监控摄像头布控点位,最终实现校园室外监控摄像头的智能布控。
关键词:三维数字地图 最大有效监控区域 智能布控
1、引言
自20世纪70年代视频监控进入中国市场以来,视频监控技术得到了飞速的发展,在安防领域里的应用也日益广泛和深入。但是,随之而来也有很多技术问题,比如就目前企事业单位、学校、小区在安装视频安防监控系统时,工作人员往往是凭借固有经验,再结合简单量测决定摄像头的安装位置、高度、监控方向、俯仰角度等参数,这种方式存在着不足之处:第一,仅依靠经验和简单量测决定摄像头的安装参数,很难保证安装之后是否符合监控需求,如果不符合需求,还需要拆掉重装,耗时费力;第二、在节约成本上,难以做到以最少的监控点覆盖所需要的监控区域,因此近些年如何实现摄像头的最优布局成为学者们的研究热点。
本文以3D GIS为基础制作三维數字校园地图,分析摄像头的监控模型,以最远监控距离测算摄像头的最大有效监控区域,以单个摄像头最大有效监控区域为依托,进一步计算完成校园全覆盖监控至少需要多少个监控点位、单个摄像头安装的监控方向、俯仰角度,初步确定摄像头的监控布局,再结合3D GIS可视域分析,对于因建筑物的遮挡而无法监控区域,通过增设摄像头完成监控区域全覆盖。
2、三维地理信息系统
地理信息系统是一种多学科交叉的综合性学科,依托于计算机科学、地图学等其它学科,从应用角度来说,它是将真实世界中的空间信息绘制成电子地图数据,在这些数据的基础上提供相应的地图服务,比如说百度地图上的导航功能。3D GIS即是三维地理信息系统,相比于传统GIS,3D GIS研究对象从二维地图转变成三维地图,三维地图比二维地图可以提供更佳的可视化效果,在多维度空间分析上也有着绝对的优势,如可视域分析等。结合3D GIS在空间分析和可视化上的优势,本文以3D数字校园地图为基础,研究如何实现校园监控摄像头的智能布控。
3 三维数字校园地图制作
目前,三维数字地图按照数据源和制作方法的不同,分为实景三维数字地图和虚拟三维数字地图。实景三维数字地图是通过摄影测量的方法准确获取地面和物体表面的三维空间坐标信息,然后将数据输入相应计算机软件生成三维数字模型,再将现实世界物体的外观信息贴到3D模型上,最终获取的三维数字地图与真实环境非常相似。但是,这种方式获取的数据量大,对硬件的性能要求高,同时设备比较昂贵,因此制作实景三维数字地图的成本比较高;虚拟三维数字地图是以现实地理信息为基础,基于WEB GIS和虚拟现实技术所实现。这种方式制作的三维地图数据量小,运行速度比较快,技术门槛低。本文采用实景三维数字地图绘制。
三维数字地图制作过程主要分为三个阶段:数据获取阶段、模型建立阶段、地图绘制阶段。首先通过全站仪采集数据,采集数据内容包括场地勘查、控制点布设、控制测量、建筑物特征点测量等;将采集后的数据导入到Auto CAD中生成建筑线框图,然后将生成的数据导入到3dmax中建立三维数字校园模型;最后通过Supermap插件生成地图文件。
4、摄像头监控模型
4.1、摄像头类型
摄像机的种类有很多,不同类型摄像机有各自特性,针对下一步需计算获取摄像头监控模型,这里首先对摄像机进行分类。常见摄像机按照形态可分为枪型摄像机、半球形摄像机、筒形摄像机、球形摄像机等;按照摄像机镜头焦距是否可变,可分为定焦距摄像机和变焦距摄像机;按照相机感光器件有效像素数可分为100万、200万、400万、800万等像素摄像机等。本文以定焦距枪型摄像机为例分析摄像头监控模型。
4.2、摄像头监控模型
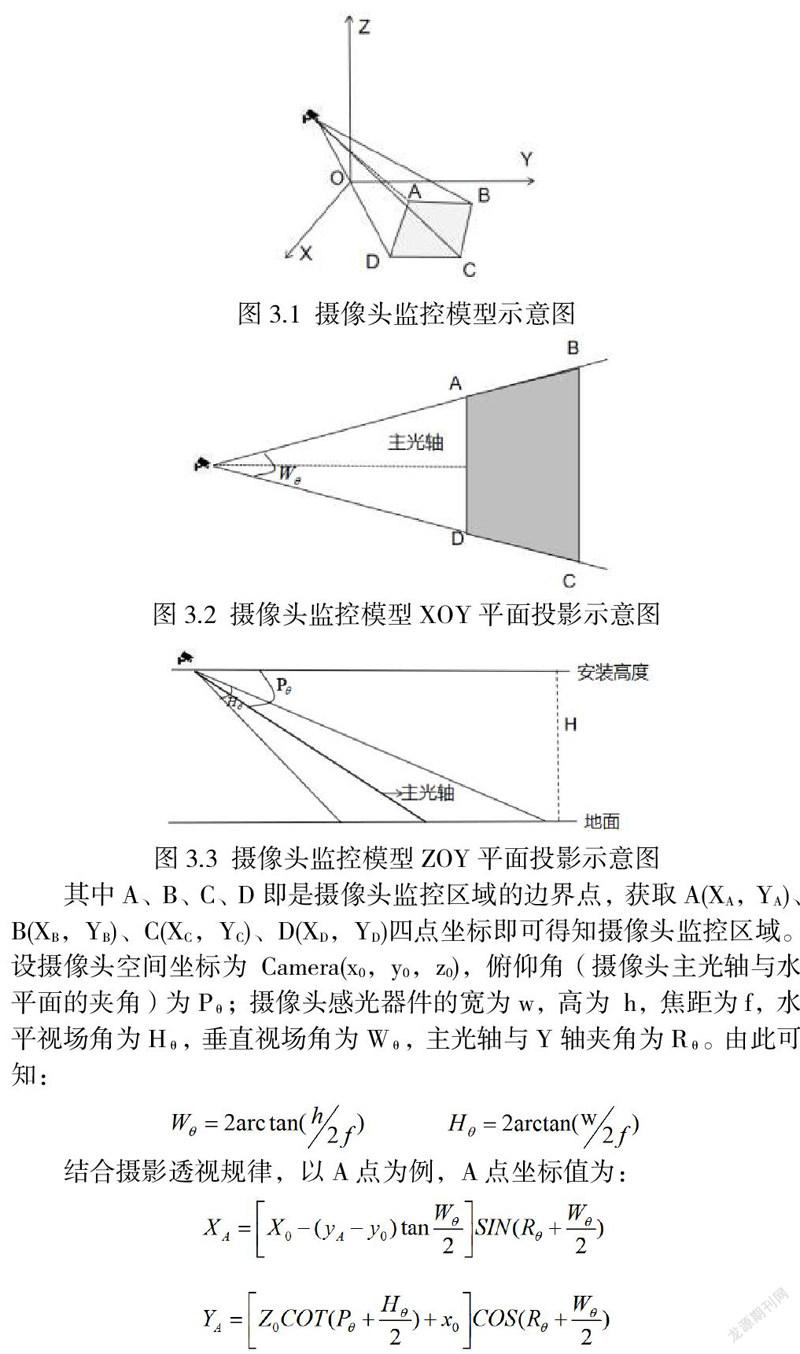
决定摄像头监控区域的因素有很多,可以分为两类:一类是摄像头自身参数,比如摄像头感光器件(ccd或cmos)的尺寸、摄像头焦距等;另一类是摄像头的安装参数,比如摄像头安装的位置、高度、俯仰角度、水平偏转角度等。根据摄像头的安装参数和自身参数绘制摄像头监控模型示意图,如图3.1,其中平面ABCD即是摄像头监控的地面区域;图3.2 摄像头监控模型在XOY平面投影示意图;图3.3 是摄像头监控模型在ZOY平面投影示意图。
其中A、B、C、D即是摄像头监控区域的边界点,获取A(XA,YA)、B(XB,YB)、C(XC,YC)、D(XD,YD)四点坐标即可得知摄像头监控区域。设摄像头空间坐标为Camera(x0,y0,z0),俯仰角(摄像头主光轴与水平面的夹角)为Pθ;摄像头感光器件的宽为w,高为 h,焦距为f,水平视场角为Hθ,垂直视场角为Wθ,主光轴与Y轴夹角为Rθ。由此可知:
结合摄影透视规律,以A点为例,A点坐标值为:
同理可获取B、C、D三点坐标值。
5、最大有效监控区域
摄像头监控模型是一个锥体(不考虑景深),锥体与地面的交叉部分是摄像头监控地面的区域,在摄像头自身参数不变情况下,这个区域的大小随着摄像头的安装高度和水平角度变化而变化。显然,高度越高、水平角度越小,摄像头的监控区域越广,但是这也意味着监控距离会变远,进而会导致远处监控目标在画面中的清晰度下降,不利于监控,因此摄像头有一个看清物体信息的最远监控距离。
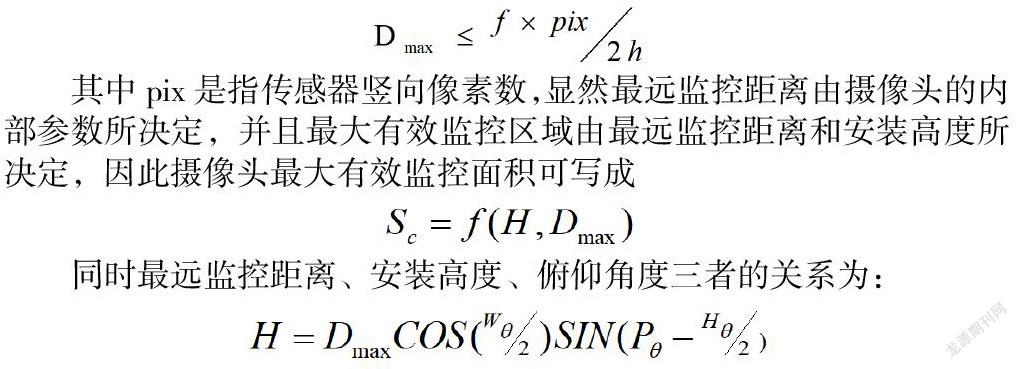
最大有效监控区域是指在安装摄像头时,使摄像头安装点位到最远监控点的距离等于最远监控距离,此时摄像头监控区域皆为有效监控,此时的监控区域也就是最大有效监控区域。最远监控距离根据监控要求而不同,本文呢以看清人脸信息为例,能够看清人脸信息最直接的因素就是有效像素点数量,普通人脸长度约23cm,根据实测和关于人脸识别的标准要求,清楚识别人脸特征要求脸部长度不少于45个像素点,即每厘米长度至少2个有效像素。结合摄像头成像原理和ccd有效像素数、焦距可计算出能够看清人脸的最远监控距离满足以下条件:
其中pix是指传感器竖向像素数,显然最远监控距离由摄像头的内部参数所决定,并且最大有效监控区域由最远监控距离和安装高度所决定,因此摄像头最大有效监控面积可写成
同时最远监控距离、安装高度、俯仰角度三者的关系为:
6、摄像头智能布控
摄像头智能布控分为两个过程:其一就是摄像头的点位分析,其二是结合三维GIS可视域分析优化摄像头布局。摄像头点位分析是指在三维地图上选取需要监控的区域,计算机自动获取全覆盖当前监控区域所需要摄像头布控的数量、点位坐标值、俯仰角度值、水平角度值;考虑到摄像头在安装后存在建筑物遮挡问题,通过可视域分析优化安装参数。
6.1摄像头点位分析
摄像头点位分析是以最大有效监控区域为依托,结合摄像头监控模型反向计算出摄像头布控点位。具体步骤如下:
第一步:选择需要监控的区域。根据GIS软件的面积量测功能,计算出待监控区域面积为S。
第二步:根据摄像头自身参数计算出单个摄像头的最远监控距离,选定摄像头安装高度H,进而获取当前安装高度下的最大有效监控区域面积,俯仰角。
第三步:以待监控区域S为底,以最大有效监控区域为滑动窗口,自S上边界开始滑动,滑动的横向步长为的上边长,竖向步长为的高,直到S区域全覆盖为止,同时计算横向步长数m和竖向步长数n,可知全覆盖S区域需(m+1)(n+1)个摄像头。
第四步:计算摄像头点位坐标值。已知摄像头监控区域的四个顶点坐标值,以及安装高度、俯仰角度,结合摄像头监控模型可获取摄像头点位坐标、值。
6.2 3D GIS可视域分析
前者计算的摄像头点位坐标,没有考虑实际安装时可能会出现建筑物遮挡问题,3D GIS可視域分析可以很好解决这个问题。3D GIS可视域分析是指通过设定观察点坐标(X,Y,Z)、水平视角、垂直视角、可视距离、水平偏转角,结合地图模型计算获取当前观察点的可视域。
当前很多地图分析处理软件都自带可视域分析功能,以摄像头点位坐标为观察点,以摄像头自身水平视角、垂直视角、最远监控距离、安装俯仰角度、水平偏转方向设定可视域分析参数,计算获取摄像头实际监控区域,
7、小结
本文以人脸识别有效像素为依托,计算单个摄像头最大有效监控区域,结合3D地图数据,基本上可以实现中小范围封闭区域摄像头智能布控。但本文尚有不足之处,摄像头智能布控分析仅限某一种摄像头,下一步将针对于多个摄像头类型,实现多种摄像头组合完成智能布控。
参考文献:
[1]钟正,张玲,柳军燕.3D GIS环境下监控摄像头空间布局设计[J].计算机工程与应用,2012,48(13):211-215.
[2]隗中杰.基于风险熵的视频监控布局模型研究[D].北京:中国人民公安大学,2019.
[3]张祖勋,苏国中,郑顺义,张剑清.OpenGL成像机理及其与摄影测量方位元素的相关分析[J].武汉大学学报(信息科学版),2004(07):570-574.