基于时空特征融合的舰船航迹预测方法
2021-12-06郝延彪万浦波王文博
郝延彪,万浦波,王文博
( 91001部队,北京 100036)
近年来,随着经济和社会发展,来往于各个海域和港口的舰船数量不断增加,这给海域管控带来了新的挑战。只有对海域态势实行有效地管控,才能及时、准确地对海面舰船进行跟踪预测。同时,随着观测手段的增多,对于舰船轨迹的获取也变得越来越容易,因此,迫切需要1种基于数据驱动的算法来提高舰船航迹预测的质量和效率。目前,已有一些学者对舰船航迹预测进行了研究。文献[1]利用卡尔曼滤波算法对舰船航迹进行预测,但受到卡尔曼滤波对于非线性、非高斯运动目标难以处理的限制,该方法对机动舰船的航迹预测效果较差。文献[2]采用扩展卡尔曼滤波算法(Extended Kalman Filter,EKF)[3]对舰船的运动状态进行预测,使得算法对机动目标的预测能力大大提高。之后,文献[4-5]分别使用支持向量机(Support Vector Machine,SVM)[6]和灰色预测模型[7]对舰船航迹进行预测,扩展了航迹预测方法。文献[8]结合灰色模型和马尔可夫过程对舰船航迹进行预测,不但能够适用于非线性和非高斯的运动场景,而且具有较强的抗干扰能力。以上算法都需要利用专业知识构建目标的运动模型,并且需要大量的先验信息才能准确预测航迹。在实际使用过程中,大多数舰船目标的运动模型难以构建,导致预测效果较差。针对这一问题,文献[9-10]提出使用BP神经网络进行舰船航迹预测,虽有一定的效果,但由于BP 神经网络结构简单,无法充分提取航迹信息,且无法对航迹时间相关关系准确建模,导致预测结果仍不理想。文献[11]利用长短时记忆网络(LSTM)[12]进行舰船航迹预测,但其仅考虑了航迹的时间序列属性,缺少对航迹运动模式的有效建模,其性能仍有较大的提升空间。通过分析可知,航迹数据包含丰富的时间和空间信息,可以使用卷积神经网络(CNN)[13]提取空间信息,循环神经网络(RNN)[14]提取时间信息,然后根据提取到的航迹信息进行航迹预测。这一方法不但可以消除传统方法需要大量先验信息并构建复杂运动模型的弊端,而且符合目前大数据的发展趋势。本文提出了基于时空特征融合的舰船航迹预测方法,通过构建基于CNNLSTM 的时空特征融合网络,利用信息丰富且数据量大的AIS 数据进行网络训练和测试,解决舰船航迹预测问题。
1 问题描述
本文提出的基于时空特征融合的舰船航迹预测方法,是在给定大量历史航迹数据的条件下,通过训练基于CNN-LSTM的神经网络模型,提取航迹的时间特征和空间特征,进行舰船航迹短时预测。已知大量AIS(Automatic Identification System)数据中主要用到了舰船的经度和纬度信息和时间信息。舰船信息表述如下:


利用[t-10,t]之间的5 个航迹位置点作为神经网络的输入,通过提取这一段航迹的时间特征和空间特征并进行融合,利用融合后的特征计算出下一时刻的位置矢量Xi(t+1) ,完成航迹预测。
2 时空特征融合网络和预测方法
2.1 时空特征融合网络
时空特征融合网络通过联合CNN和LSTM构建,CNN 提取航迹空间特征,LSTM 提取航迹时间特征,时空特征融合网络的结构,如图1所示。

图1 时空特征融合网络结构图Fig.1 Schematic diagram of temporal-spatial feature fusion network
结构主要包括多尺度卷积网络、残差网络、LSTM、融合网络。多尺度卷积网络针对舰船目标运动复杂的特点,设计卷积核大小分别为1、3、5 的一维卷积从多个尺度提取航迹空间特征,以提高网络的特征提取能力。残差网络由3 个残差块[15]组成,用来精细提取航迹运动特征,提高网络对于舰船复杂运动的鲁棒性。每个残差块由卷积核大小的分别为1、3、1的一维卷积层串联而成,并在残差块的首尾添加残差连接,使得空间特征可以越过卷积层直接传递,从而减少了梯度消失的影响。LSTM 用来提取时间特征,LSTM 是RNN 的1 种 变 体,与 普 通 的RNN 相 比,LSTM 添加了门控机制,包括输入门、遗忘门和输出门,可以控制网络中信息的传递。输入门控制信息的流入;遗忘门控制信息的删除;输出门控制信息的输出。LSTM的输出维度与输入的空间特征图的维度相同,即不改变特征图的维度,只提取航迹的时间特征。融合网络由3 个卷积核为5 的卷积层构成,其步长为2,经过每1层的计算可使时空融合特征图的维度降低,达到减少冗余信息的目的。
2.2 航迹数据归一化处理
为了减小经度、纬度、航速和航向之间数值分布差异给网络预测结果带来的影响,需要对AIS 数据进行归一化处理。本文使用理查标准化进行归一化,将AIS 数据中经度、纬度、航速和航向分布归一化为[0 ,1] :

2.3 预测方法
本文提出的方法是利用神经网络提取并融合航迹中的时空特征,利用时空融合特征预测目标的运动速度,计算出下一时刻的目标位置,进而实现舰船的航迹预测。
假设网络的输入为经过归一化处理后的舰船航迹Ti,选取其中的5个航迹点,首先,经过多尺度卷积网络提取航迹空间特征,提取到的特征可以表示为:

式(7)~(12)中:Wi,Wf,Wo,WC分别表示输入门、遗忘门、输出门、记忆单元的网络参数;bi,bf,bo,bC分别表示输入门、遗忘门、输出门、记忆单元的偏置;σ表示Sigmoid非线性激活函数[17]:



最后,将用预测位置前一时刻的航迹经纬度位置矢量与预测的经纬度运动距离相加,即可得到预测位置的经纬度位置矢量:

网络使用均方误差(Mean-Square Error,MSE)作为损失函数,通过比较预测航迹点与真实航迹点之间的均方误差,使得网络参数不断优化,以实现预测位置与真实位置尽可能小的差异,

式(17)中:Li(t+1) 表示t+1 时刻真实的舰船航迹位置矢量;L̂i(t+1) 表示t+1 时刻预测的舰船航迹位置矢量。
3 实验验证及分析
3.1 实验数据和实验环境
本文所使用的是某海域的AIS数据。从数据库导出并存储为csv 格式,所用到的字段信息为:MMSI、
TIME/s 、LONGITUDE/(°) 、LATITUDE/(°) 、SOG/kn 、COG/(°)。实验选取了10 000 条AIS 航迹数据作为原始航迹数据,随机选取其中的8 000 条作为训练集,2 000条作为测试集。
本实验使用的计算机环境:中央处理器为Intel酷睿i9-9900k,主频3.6 GHz,内存32 GB,操作系统为Ubuntu16.04,显 卡 为Nvidia GTX 1080Ti,基 于Py-Torch深度学习框架[18]。
3.2 实验方案和评价指标
经过航迹数据的归一化处理后,按照2.3 节所述的处理方法将航迹数据输入到时空特征融合网络中进行航迹预测。实验采用MSE 作为舰船航迹预测质量的评估指标,同时也给出可视化的预测结果。MSE的值越小,代表网络预测的结果越准确。
通过与传统航迹预测方法进行对比,验证本文提出方法的有效性。传统方法将预测时刻与前一时刻之间的运动看作匀速直线运动,通过前一时刻目标的速度与运动时间相乘得到目标的移动距离,从而得到预测结果。
3.3 实验结果及分析
3.3.1 预测结果可视化分析
为了得出本文所提方法和传统方法之间的性能差异并证明本文所提时空特征融合网络的有效性,通过仿真实验对本文方法和传统预测方法的可视化结果进行对比。
利用AIS数据训练时空特征融合网络后保存模型参数,在测试集中选择8个典型的舰船运动场景,对比2个网络的航迹预测可视化结果如图2所示。其中,蓝色点迹表示真实的舰船航迹,红色点迹表示预测的舰船航迹。


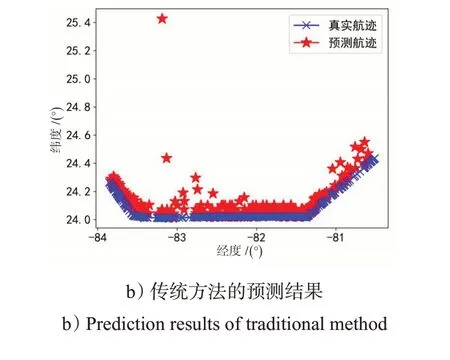
图2 航迹预测的可视化结果Fig.3 Visualization results of track prediction

从图2 中可以看出,时空特征融合网络的预测航迹与真实航迹十分接近,但传统方法的预测航迹与真实航迹差异较大。当舰船发生机动时,时空特征融合网络仍能很好地预测舰船的航迹,但传统方法预测的航迹会产生较大偏差,证明时空特征融合网络能够提取并融合航迹的时空特征,所得到的网络能够比较全面地拟合舰船的运动属性,具有较好的航迹预测能力。
3.3.2 均方误差分析
为了能够定量对比和分析航迹的预测效果,对本文方法和传统方法预测航迹的MSE 进行对比,MSE值小的表明此网络具有更好的预测性能。
同样,将3.3.1中的8个舰船运动场景的MSE进行对比,如图3 所示。蓝色曲线表示时空特征融合网络的MSE;绿色曲线表示传统方法的MSE。


图3 各个场景的均方误差曲线Fig.3 MSE curve of each scene

根据图3,通过对MSE 大小进行比较,本文提出的舰船航迹预测网络的MSE 远远小于传统方法的MSE,证明本文提出的预测网络的预测结果与真实值相比差别不大,预测结果精确。而传统方法的预测结果与真实值相差较大,无法获取可靠的预测结果。通过对MSE 的波动情况进行比较,本文提出网络的MSE 没有较大波动,而传统方法的MSE 波动较大。通过与图2对比观察发现,传统方法MSE的较大波动位置对应舰船发生机动时刻,证明本文提出的网络可以适应舰船机动运动场景,并在舰船机动过程中预测结果也不会发生较大偏差,预测可靠性较好。以上实验结果证明了时空特征融合网络可以提取航迹时间特征和空间特征,与传统方法相比,网络能够使MSE减少0.2~1.4,预测性能得到较大提升。
4 结论
本文提出了基于时空特征融合的舰船航迹预测方法,通过结合CNN和LSTM同时提取航迹的空间特征和时间特征,利用大量AIS数据训练网络模型,解决了舰船航迹预测,特别是舰船机动航迹预测这一较为困难的问题。利用典型AIS 场景和MSE 指标对网络性能进行测试,测试结果表明,本文提出的网络具有准确的舰船航迹预测能力,能够适应舰船机动运动场景。与传统方法的预测结果相比,该方法能够使预测MSE减少0.2~1.4,使预测性能大大提高。