基于冲突阈值的城市物流无人机空域容量评估
2021-12-04赵嶷飞张志玮
赵嶷飞,张志玮
(中国民航大学空中交通管理学院,天津 300300)
近年来,无人机作为一种新兴的空中运输工具发展迅速。京东、顺丰、饿了么等龙头物流企业也开始使用物流无人机提供同城即时配送服务,随着该行业的不断发展,日后会不可避免地引发低空空域拥挤等问题。提前估算低空空域容量,做好城市物流无人机的发展规划,避免在发展中出现“先拥挤,后治理”的困境,对物流无人机产业健康发展具有重要意义。
在有人机运输系统中,空域容量是指某一空域单元(机场、终端区、区域、扇区、航路等)在单位时间内能够接收的最多数量的航空器架次[1-3]。容量评估方法包括:基于仿真模型的评估方法、基于历史数据分析的评估方法、基于数学计算模型的评估方法和基于管制员工作负荷的评估方法[4]。与有人机不同,无人机飞行控制完全靠计算机完成,没有地面管制员干预,因此,基于管制员工作负荷的评估方法在无人机空域容量的评估中不再适用。现阶段城市物流无人机大多处于试点运行状态,也无法通过统计历史运行数据来分析空域容量。目前,关于无人机空域容量的研究,大多采用数学计算模型和仿真模型的方法评估空域容量,如:NASA 对于无人机空域容量的定义是假设所有无人机同向匀速飞行,无人机间保持相同距离且均匀分布,此时空域内可容纳的无人机数量即为无人机空域容量;Bulusu 等[5]基于冲突阈值的评估方法将无人机空域容量定义为在不同阈值下的最小值;Yang 等[6-7]以空客Vahan 模型研究了自由飞行状态下的自主避撞问题,提出了相应的避撞方案,通过仿真方式评估了实施该方案后的空域容量;Vascik 等[8]对垂直起降机场的容量进行研究,借鉴直升机机场的运行方式,提出城市空中交通机场场面运行流程,并基于整数规划方法构建了垂直起降机场容量模型。
国外学者在容量评估方面多以载人无人机为研究对象,而对目前发展迅速的小型城市物流无人机空域容量问题的研究较少。国内仅有少数学者,如崔恺等[9]对城市物流无人机的流量控制问题进行研究。结合目前国内外的研究现状,将城市物流无人机空域容量定义为:单位时间内,在可接受的冲突下某一空域承担的最大运行架次。依据该定义,冲突阈值的大小和避撞策略都会对空域容量产生影响。以中国民航大学(简称中航大)南院校区为运行场景,研究城市物流无人机空域容量评估方法。结合城市物流无人机的运行特性和校园人口密度建立基于冲突阈值的无人机空域容量评估模型,通过仿真飞行得出城市物流无人机的空域容量。
1 城市物流无人机空域容量问题描述
经过对迅蚁、京东和亿航的城市物流无人机运行模式的调研,分析了飞行航线的结构和参数,将城市物流无人机的飞行阶段划分为起降飞行阶段和航路飞行阶段。
调研发现,物流无人机起降飞行阶段可以细分为功能不同的3 部分,如图1所示。降落的物流无人机按照时间顺序:首先到达排序等待段,在该段悬停等待,按照指定的次序进入中间过渡段;中间过渡段中,物流无人机会持续下降高度,并通过不断调整位置来对准起降平台;最后通过平台起降段降落在起降平台上,完成货物的装卸任务。起飞过程与之正好相反,物流无人机从起降平台垂直起飞,反向经过以上3 个阶段,到达巡航高度后进行航路飞行。
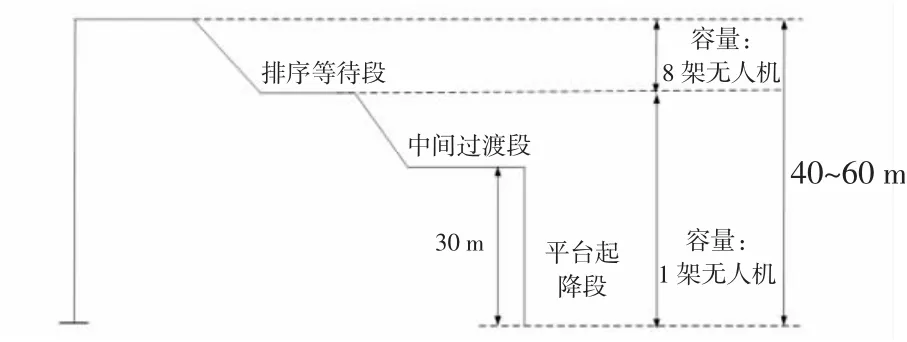
图1 物流无人机起降飞行阶段飞行剖面Fig.1 Flight profile of logistics UAV during take-off and landing
在航路飞行阶段,物流无人机在两点之间的飞行大多为点到点的直线飞行,只有当飞行路径上存在限制区时才会绕飞。飞行使用的航路为单向航路,即在同一时刻内,同一条航路内不允许有两架物流无人机同时飞行,航路示意图如图2所示。
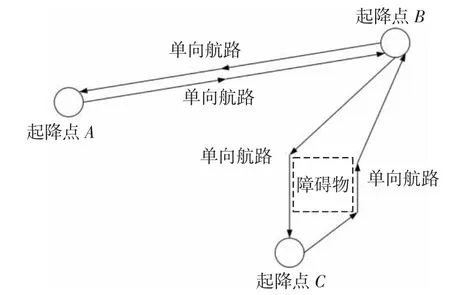
图2 物流无人机单向航路示意图Fig.2 Schematic diagram of one-way route of logistics UAV
中国民用航空局要求城市物流无人机飞行的实际高度限制在120 m 以下,由于可用高度范围有限,无法分高度层运行,因此,同一区域内的所有物流无人机均使用同一高度飞行。按照这一运行方式,物流无人机冲突调配方面主要通过调整起飞间隔和禁止多架物流无人机同时使用一条航路的策略来实现,即在飞行前路径和起飞时间选择时就消除了可能出现的冲突。因此,目前在用的物流无人机没有配置自主冲突解脱设备。
综上所述,物流无人机航线特点是单一高度层、点到点直飞与航路独占。如果按照一定的飞行路径、起飞时间分配规则,两架或多架物流无人机之间存在飞行冲突,说明空域容量不足,无法满足物流无人机运行需要。因此,城市物流无人机空域容量可用不同交通密度下物流无人机群冲突严重程度来度量。
2 基于冲突阈值的无人机空域容量评估模型
2.1 无人机冲突分析及建模
建立无人机空域容量评估模型需要对每两架无人机之间的冲突情况和冲突时间进行分析,通过计算两架无人机之间的相对距离与规定的冲突阈值δ进行比较,判断无人机之间是否发生冲突,如图3所示。当两架无人机分别以ν1、ν2的速度向上飞行时,两架无人机之间的相对位移为pr。当‖pr‖>δ时,两架无人机不会发生冲突,为常规运行;当‖pr‖≤δ时,判定两架无人机发生冲突。另外,除了两两冲突之外,还需考虑多机冲突,其定义为至少一架无人机与另外多架无人机之间同时发生冲突。
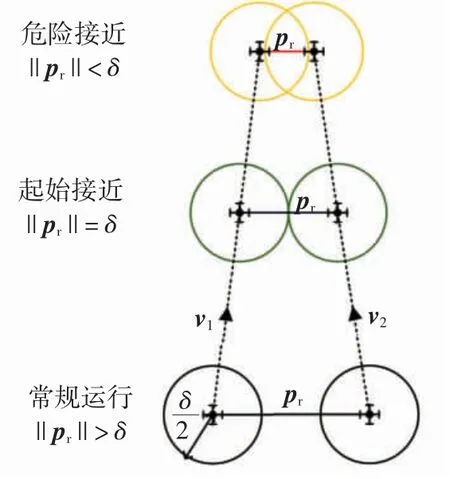
图3 无人机冲突情况的判别Fig.3 Judgment of UAV conflict situation
当两架无人机同时出现在空域中且两条飞行路径的最小距离小于冲突阈值δ时,可以通过将无人机的初始位置、飞行速度代入不等式方程||pr||≤δ,来判断两架无人机是否发生冲突,若发生冲突则计算冲突发生的起止时间(Tint1,Tint2)。相关参数定义[10]如表1所示。
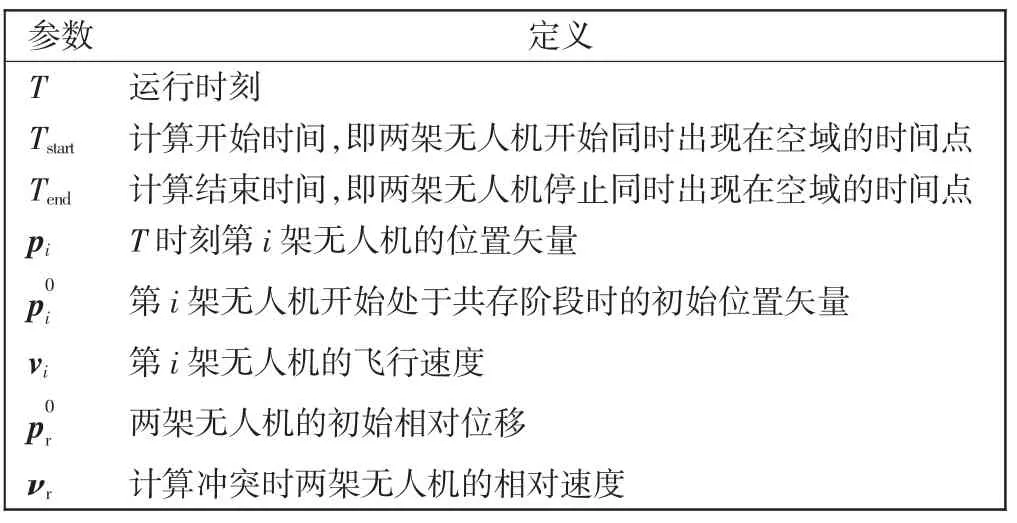
表1 相关参数定义Tab.1 Definition of related parameters
两架无人机位置矢量与相对位移的方程描述如下
如果相对距离在冲突阈值之内,则判定为发生冲突,由||pr||2≤δ2推出

考虑等式成立的条件,式(5)有两个解,即
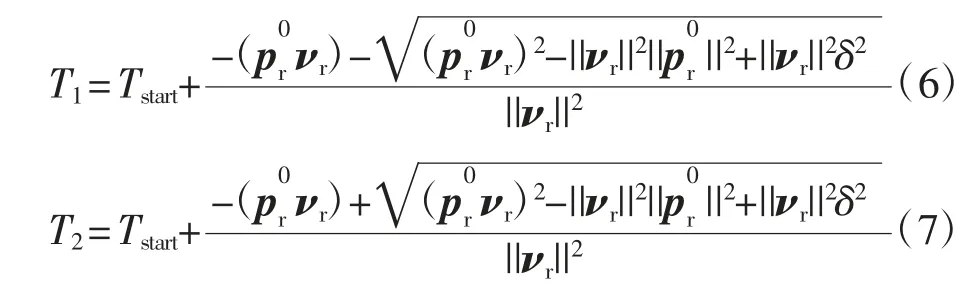
根据T1、T2和Tstart,Tend之间的大小关系,可得出两架无人机发生冲突的起止时间(Tint1,Tint2),如表2所示。
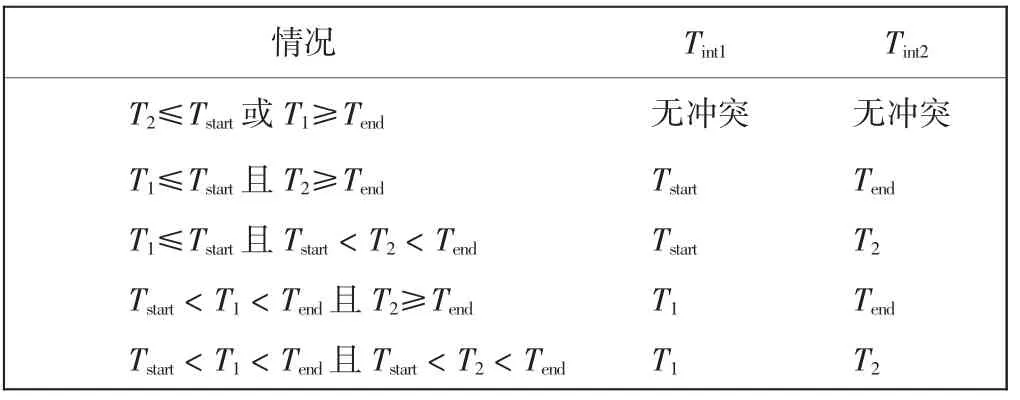
表2 无人机发生冲突的起止时间Tab.2 The start and end time of the UAV conflict
2.2 容量评估模型
根据城市物流无人机空域容量的定义,使用系统的标准冲突时间(NTSC,normalized time spent in conflict)[10]作为可接受冲突的度量,把可接受的标准冲突时间tNTSC所对应的最大运行架次记为空域容量。将每架物流无人机发生冲突的飞行时间与总飞行时间的比值记为单架物流无人机的标准冲突时间,取系统中所有物流无人机标准冲突时间的平均值,记为系统的标准冲突时间,即

式中:n为系统中物流无人机的数量;为第i架物流无人机发生冲突的飞行时间;ti为第i架物流无人机的总飞行时间。
2.3 仿真评估模型
基于上述两个模型,通过仿真的方法对空域容量进行评估,仿真过程如图4所示。
首先获取运行区域内各位置点的经纬度坐标,通过计算两点间的相对距离,将经纬度坐标转换为本地坐标。先将经纬度转换为弧度,计算公式如下

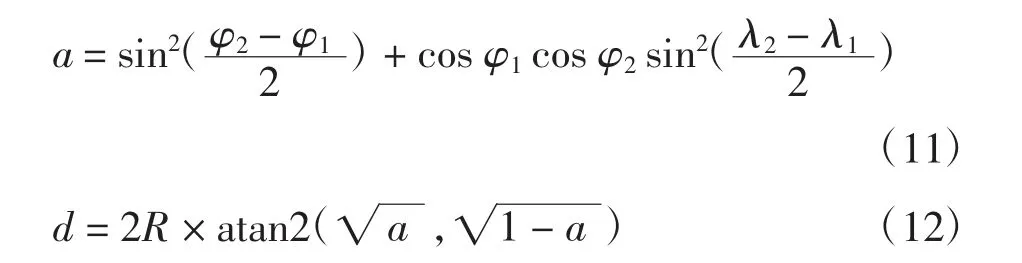
式中:φ1、λ1,φ2、λ2分别为两点的弧度;R是地球半径;atan2(x,y)为三角函数。
再根据需求点分布和人口密度分布情况,确定运行区域内的起降点数量。在需求点附近,随机确定起降点位置。在每次仿真飞行前需要获取仿真架次,在所有的起降点中随机选取起点和终点,其中每个点被选到的概率均一致,在所要仿真的时间段内均匀地分布起飞时间,完成飞行计划的生成,进行仿真飞行。
最后通过飞行数据计算tNTSC,根据tNTSC的值调整仿真架次,最终得到量化的空域容量。
3 实例分析
3.1 仿真场景选取
从目前各物流企业试运行情况看,城市物流无人机的使用场景多集中在住宅区、高校、中央商务区(CBD,central business district)等人口相对密集、需求量较大的地方。由于特定时段大量餐饮配送需求集中出现,学校场景颇具代表性,其空域容量问题值得研究。因此,选取中航大南院校区上空空域作为目标区域,使用Matlab 建模进行空域容量仿真分析。
中航大南院校区南北长约1.1 km,东西宽约700 m,占地约1 150 亩(1 亩=666.67 m2)。通过前期的物流需求调研分析得知,校园内的物流需求点一般集中在学生宿舍楼、图书馆和实验楼处。学生宿舍楼主要分布在校区的中部和西南区域,以实线框标识;图书馆和实验楼主要分布在校区的西北和东南区域,以虚线框标识,中航大南院校区示意图如图5所示。

图5 中航大南院校区示意图Fig.5 South campus of Civil Aviation University of China
3.2 仿真求解
根据前期统计的宿舍楼、图书馆及实验楼人口总数及调研获得的单个起降点可服务人数,求得仿真场景内的起降点总数为70 个。再根据人口密度分布情况,通过随机撒点的方式确定物流无人机起降点的位置,结果如图6所示。
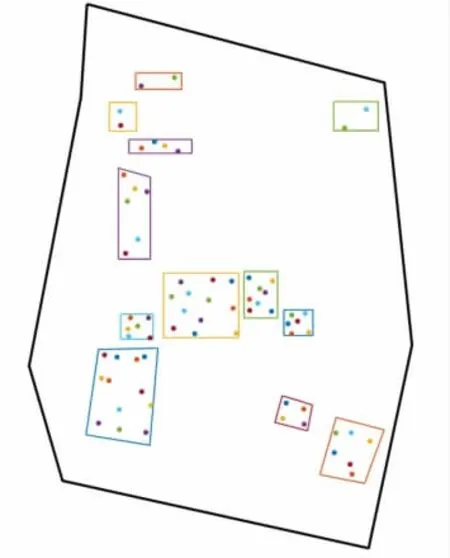
图6 基于人口密度的物流无人机起降点分布情况Fig.6 Distribution of logistics UAV take-off and landing points based on population density
文中选取1 h 作为容量评估的单位时间,分别对空域容量50、100、150、200、250、300 架次/h 进行仿真飞行。在1 h 内根据仿真架次平均分配起飞时间,并随机选取起点与终点生成飞行计划。由于现阶段的物流无人机暂时没有多机之间的冲突探测与解脱功能,因此,在仿真中选取的可接受冲突时间为0,即tNTSC=0时所对应的最大架次为中航大南院校区的空域容量。根据前期调研结果得知,城市物流无人机设计的航路水平宽度一般为20 m,当两架物流无人机相对距离小于20 m 时,可能会发生冲突,产生不安全事件。因此,令δ=20 m,分别计算0~300 架次/h 之间的运行状态。图7 为空域容量50 架次/h 和300 架次/h 的飞行路径。
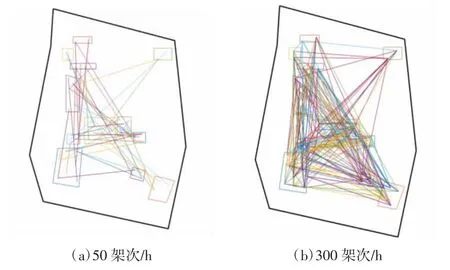
图7 不同空域容量下的飞行路径Fig.7 Flight path under different airpace capacity
根据飞行计划,将物流无人机运行时刻、初始位置和飞行速度等信息代入式(5)得到每两架物流无人机之间的冲突情况,最后把每架物流无人机的冲突时间代入式(8)计算tNTSC。在150 架次/h 以内时,tNTSC=0;在200 架次/h 时,tNTSC=0.003 9。然后对150~200 架次/h之间的情况,逐一进行仿真飞行。最终得到tNTSC=0 时的最大架次为152 架次/h,将152 架次/h 视为中航大南院校区的空域容量。图8 展示了δ=20 m 时,tNTSC随空域容量的变化趋势。
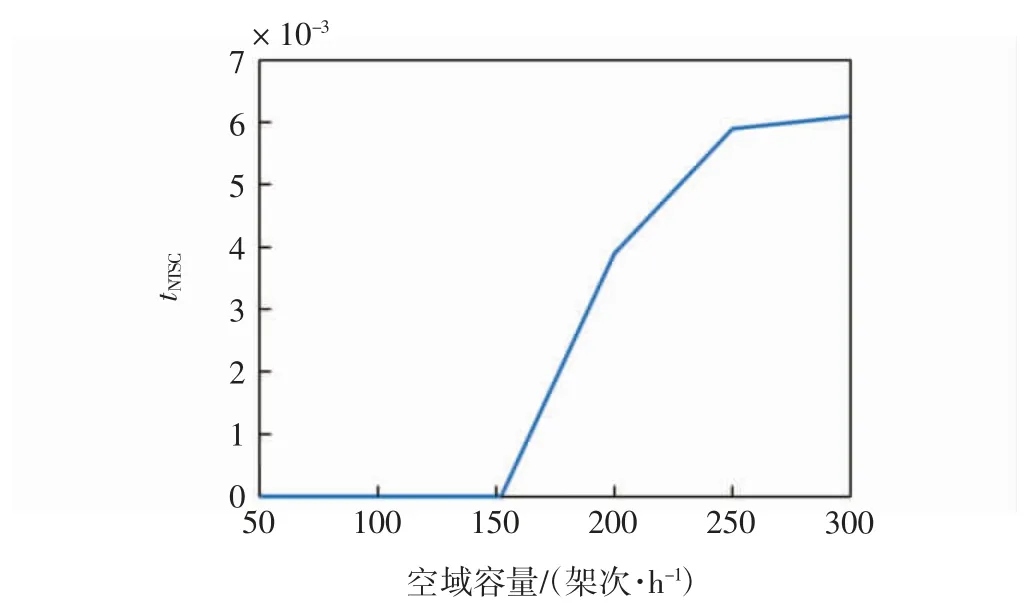
图8 δ=20 m 时空域容量与tNTSC 之间的关系Fig.8 The relationship between airspace capacity and tNTSC when the conflict threshold is 20 m
3.3 空域容量影响因素分析
3.3.1 冲突阈值
目前,多数文献对冲突阈值定义为1 s 内无人机的极限飞行距离加上10%的安全裕度,大多数物流无人机的巡航速度大于等于20 m/s,又由于当前城市物流无人机的航路水平宽度设计为20 m,可认为冲突阈值一般不会为小于20 m。由于冲突阈值的大小会影响冲突的判别和冲突的持续时间,进而改变tNTSC的大小从而影响空域容量评估;又因物流无人机自身体积较小,有较好的机动性能,故探究不同冲突阈值对tNTSC和空域容量的影响。选取20、30、40、50 m 作为冲突阈值,用以评估不同冲突阈值时tNTSC随空域容量的变化情况,如图9所示。
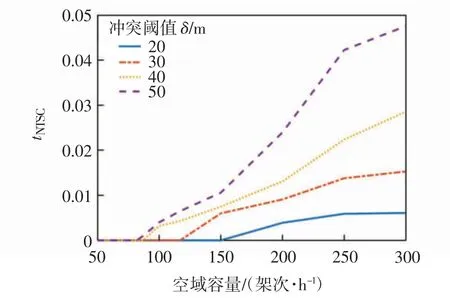
图9 不同冲突阈值下tNTSC 随空域容量变化曲线Fig.9 Changes of tNTSC with airpace capacity under different conflict thresholds
由图9 的变化曲线可知,不同的冲突阈值下,tNTSC均会随着空域容量的增长而逐渐增长,即飞行中冲突所占的时间也会随之增加,其中,冲突阈值50 m 所对应的tNTSC曲线的斜率最大,这表明冲突阈值越大,tNTSC随交通密度增长的速度也越快。图10 显示了在某一确定的空域容量下,tNTSC随着冲突阈值的增加呈指数增长。因此,当初始冲突阈值较大时,可以通过降低冲突阈值的大小,减少冲突发生的平均时间。
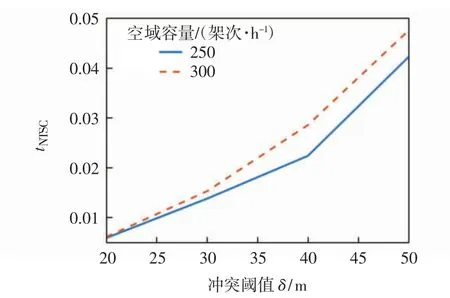
图10 不同空域容量下tNTSC 随冲突阈值变化曲线Fig.10 Changes of tNTSC with conflict threshold under different airspace capacity
不同冲突阈值下的空域容量如表3所示,由表3可知:随着冲突阈值的降低,空域容量逐渐上升;当冲突阈值较小时,空域容量对冲突阈值的变化比较敏感,冲突阈值由20 m 增加到30 m 时,空域容量降低了35 架次,冲突阈值由40 m 增加到50 m 时,空域容量只降低了5 架次。

表3 不同冲突阈值下的空域容量Tab.3 Airspace capacity under different conflict thresholds
3.3.2 冲突解脱能力
虽然现在运行的物流无人机上没有配置自主冲突解脱设备,但随着物流无人机运行架次的增多和技术的发展,未来的物流无人机可能会配备自主冲突解脱设备。因此,还需考虑不同冲突解脱能力下的空域容量。通过式(5)可以求解出每架物流无人机与同时出现在空域中的其他所有物流无人机之间的冲突时间,并运用算法把在同一时刻存在联系的多架物流无人机汇总起来,统计相同组合出现的最早、最晚时刻,得出3 机冲突、4 机冲突出现的起止时间。计算不同冲突阈值和冲突解脱能力下的空域容量,如图11所示。
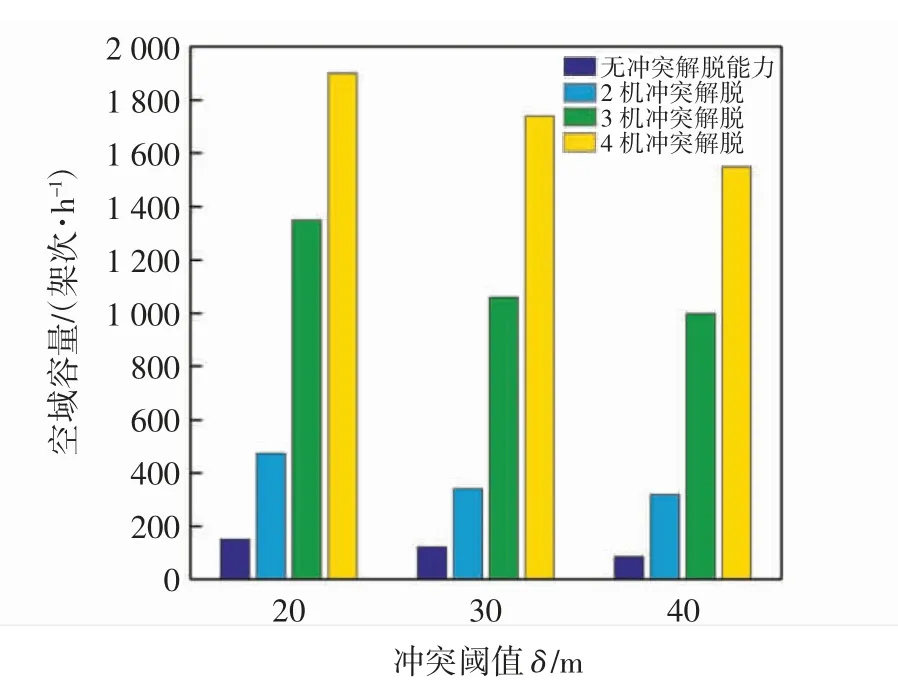
图11 不同冲突阈值及冲突解脱能力下的空域容量Fig.11 Airspace capacity under different conflict resolution capabilities
通过图11 可看出,当物流无人机具有冲突解脱的能力后可以极大地提升空域容量,其中,2 机冲突解脱相较于无冲突解脱能力对容量的提升最为明显,3 机间的冲突解脱能力相较于2 机冲突解脱对空域容量的提升也比较明显。因此,关于冲突解脱能力的研究,应集中于2 机与3 机之间。
4 结语
基于人口密度分布对城市物流无人机的空域容量进行评估,采用可接受的冲突时间作为度量得到了量化的空域容量。相较于其他无人机空域容量评估方法,该方法更加贴近城市物流无人机的运行场景,结果更具参考性。
通过模拟多种冲突阈值、空域容量下的运行情况,发现降低冲突阈值和提升冲突解脱能力会使空域容量有明显提升。在今后的实际运行中,可着重提升2机和3 机间的冲突解脱能力,减少可能出现的冲突;通过提高定位精度和导航精度降低冲突阈值;在航路规划阶段,使航路的水平宽度大于或等于冲突阈值。在本研究初期,飞行路径的建模为点到点直线飞行,下一步的研究将通过改进模型探究不同航路结构对空域容量的影响。
