多传感器融合的运输机器人导航系统*
2021-12-04刘孝童孙浩宇王小桥彭昕月虞玲
刘孝童,孙浩宇,王小桥,彭昕月,虞玲
(安徽理工大学电气与信息工程学院,安徽淮南 232001)
在当今社会快速发展下,具有自主导航和环境感知能力的无人机在物流、交通、监控等工业领域有着广阔的应用前景。目前的工业无人机大多局限于有GPS 数据的户外使用。虽然无人驾驶飞行器室内自主导航已经在机器人方面得到了积极的研究,但实用化的工业案例还很少。
在仓库中使用无人机进行物品库存检查与人工检查方式相比有很大优势,它可以节省时间和成本,并避免了工人在快速移动的高位叉车上进行人工条形码扫描时受伤的风险。然而,大多数的商用(非自主)无人机不适合在仓库中使用,因为无人机操控员很难进行安全的远程操作。一些无人机制造商给出用于清点任务的无人机解决方案,但目前没有关于仓库实际应用的文章及方案,因为不发生碰撞的安全操作相当困难。
为了安全和成功地进行室内仓库的库存检查,设计了一种基于EKF 的多传感器融合框架,该框架使用了低成本的传感器,包括3 个摄像机、1 个二维激光扫描仪、1 个一维距离传感器和1 个惯性测量单元。提出了两种鲁棒的数据融合方法:①利用马氏范数分量检验有效地剔除离群点;②通过引入“伪协方差”将视觉SLAM 添加到测量更新中。
设计的系统主要特点如下:①提出了一种低成本的多传感器系统和基于扩展卡尔曼滤波的多传感器融合框架,以此来获得最优的位姿估计。②提出了鲁棒数据融合方法,增强了鲁棒性,消除了碰撞风险,保证了物料仓库内库存检查的成功。
1 相关工作
若干课题组已经发布了针对仓库库存应用的自主无人机系统的开发结果。文献[1]提出了用于仓库内部操作的高性能自主清点无人机。其传感器设置包括RFID 读取器、2 个高分辨率摄像头和1 个昂贵的3D 激光雷达,并在一个具有外部仓库管理系统和高级检查任务的可操作仓库中进行实验。他们的方法还需要定期构建3D 特征地图,并且有将语义地图[2]与3D 特征地图对齐的步骤。文献[3]提出了一种导航系统,使无人机能够在黑暗和没有GPS 定位的环境(如仓库)中操作,以保证人员的安全。他们使用2 个2D 激光雷达和1 个摄像头进行标记识别。
2 系统总体设计
本文所设计系统的总体结构如图1 所示,其中包括多个激光雷达和摄像头传感器、连接到传感器的软件算法模块、基于EKF 的多传感器融合框架[4-5]和其他额外组件等。此外,图1 中灰色虚线矩形内为鲁棒数据融合方法,此方法将在后续详细说明。

图1 自主无人机的总体系统架构
从传感器采集的数据通过相应的算法以相对/绝对姿态、角度或距离的形式馈入基于EKF 的测量更新模块[6]。参考文献[7]提供了无人机的六维相对姿势,参考文献[8]识别算法给出了它的六维绝对姿势。
基于EKF 的多传感器融合框架与鲁棒数据融合方法相结合,将最优估计的无人机姿态发送给飞行控制器和任务规划,FCU 根据反馈的姿态数据输出四旋翼框架的低速电机命令,稳定飞行。
设计一个多传感器融合框架[9],以优化估计无人机六维姿态在室内(没有GPS)环境。以EKF 为基础,其中IMU位姿作为时间更新阶段预测的状态变量。
假设IMU 传感器的位姿与无人机传感器的位姿相同。卡尔曼滤波器的状态由IMU在世界坐标系中的位置向量{W}构成,其速度矢量,其取向四元数描述IMU 对W的旋转,陀螺偏差bω和加速度计偏差ba。整个状态产生一个十六维状态向量x:

推导出以下微分方程:

3 鲁棒数据融合
提出两种鲁棒数据融合方法[10]来提高EKF 的鲁棒性,以克服漂移、异常值和干扰问题。这些都有助于多传感器融合框架成功地应对具有挑战性的仓库环境。
3.1 马氏范数检验剔除离群值
离群值通常来自传感器故障、较大的识别误差或恶劣的测量环境。为了剔除这种测量异常值,计算和监控测量更新的马氏范数M:
式(7)中:z为测量向量;H为线性化后的测量向量状态估计矩阵;xˆ为状态预测;S为状态协方差矩阵。
所以在飞行任务期间单独检查该规范的特定组成部分。如果它们中的一些大于预定阈值,本文采用的EKF 框架将拒绝测量的相应部分。这种基于分量的马氏范数测试通过将测量向量分离成更小的维向量来降低错误拒绝率。
3.2 利用Visual SLAM 实现伪协方差
为了极大限度地减少激光扫描仪的Hector-SLAM(通常发生在垂直移动期间)造成的干扰影响,加入了视觉SLAM算法,该算法将x、y、z位置和偏航方向数据融合到扩展卡尔曼滤波中,以减弱来自Hector-SLAM 或其他未知源的干扰影响。
由于基于关键点的视觉SLAM,不提供输出的协方差,这是EKF 的测量更新阶段所需的。因此,采用运动模型中的匹配点数量,如图2 所示,来提取ORB-SLAM2 的不确定性信息,即“伪协方差”。通过反复实验和调整过程,得到了匹配点数目和伪协方差之间的最佳比例常数和偏移量。运动模型中匹配点的数目为图2 的288 个和图3 的47 个。随着位姿估计次数的减少,位姿估计的不确定性有增大的趋势。因此,使用这个数字来计算伪协方差引入EKF 以减少干扰的影响。
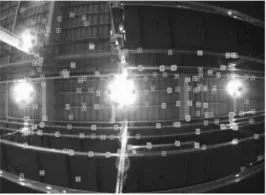
图2 向上摄像机未改进扫描结果
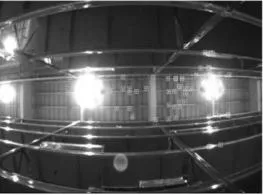
图3 向上摄像机的ORB SLAM2 结果
4 结束语
本文设计了一种具有低成本和多传感器融合框架的自主无人机,可以有效用于狭窄和黑暗的仓库环境。为了解决普通的无人机定位方法存在的问题,提出了鲁棒数据融合方法,基于分量的马氏范数检验剔除离群值,通过引入伪协方差来结合视觉SLAM。这使自主飞行任务更安全,有利于在仓库进行循环库存检查。作为一个完全自主的系统,这种方法不需要人工操作,同时也节省了时间和成本,并且解决了工人高空危险作业的问题。下一步将继续对系统进行改进研究,进一步降低成本,并将此方法推广到各种室内和室外应用中。
