真空光阱中微球参数反馈控制的数值仿真研究
2021-12-03高立夫胡展铭肖光宗
高立夫,胡展铭,韩 翔,肖光宗,罗 晖
(1.海军装备部驻湘潭地区军事代表室, 湖南 湘潭 411100; 2.西安卫星测控中心, 西安 710000; 3.国防科技大学前沿交叉学科学院, 长沙 410073)
1 引言
精密测量技术是先进制造发展的重要基础和前提,是自主、完整掌握发展重大装备的关键之一[1]。进入21世纪后,先进装备制造已逐渐向精密化、集成化、智能化发展,对物理量精密测量的需求越来越高。以激光技术为代表的光学检测技术具有非接触性、高精度、三维性和实时性等优势,为物理量的精密测量提供了新的解决途径[2-3]。真空光阱是在可控压强的气体环境中利用光的力学效应操控微小粒子的一种技术,由于真空光阱可以隔绝捕获微粒与外部环境之间的机械接触和热量交换,可近似视为理想状态的简谐振子,被认为是物理量精密测量的理想平台,并可在室温环境实现量子基态,因而在极弱力测量、精密惯性传感、极弱力矩检测、分数元电荷量搜寻等方向具有很大的应用潜力[4-7]。近年来,真空光阱技术快速兴起并受到人们的广泛关注[8-12]。
在真空光阱中,捕获微粒所受环境阻尼大幅降低,惯性力占据主要作用,微粒呈现出高速运动,容易从光阱中逃逸。通常需要施加反馈控制措施来实现微粒的稳定捕获,并可降低微粒质心运动的等效温度,因此也被称为反馈冷却。其中,参数反馈控制是常用的反馈冷却方法,所采用的冷却光束与捕获光束为同一激光束,具有结构简单和实现便利等优势[13-14]。尽管真空光阱中的机械振子在室温下便可达到μK~mK级等效温度状态,无需复杂的液氦冷却系统,但实验系统仍包含光阱光路、位移测量光路、真空系统和反馈控制电路等模块,需要较长时间调试实验系统。建立合适的物理模型开展数值仿真研究将可测试反馈控制机理的冷却效果,提高容错能力,加快系统调试过程,为器件工程化提供参考。本文首先将建立光阱中微球在参数反馈控制下的动力学模型,然后选取合适的参数仿真微球的动力学过程,观察微球质心运动的冷却效果,并详细分析主要参数对冷却效果的影响。
2 理论模型
2.1 参数反馈冷却方法概述
参数反馈冷却方法[13]是通过被捕获微粒的位移状态反馈控制捕获光束的功率来冷却微粒质心运动的等效温度,其基本原理为:当被捕获微粒远离平衡位置时增大捕获激光功率,当被捕获微粒向平衡位置移动时降低捕获激光功率。目前参数反馈冷却方法主要被用于单光束光阱,其实验结构如图1所示。
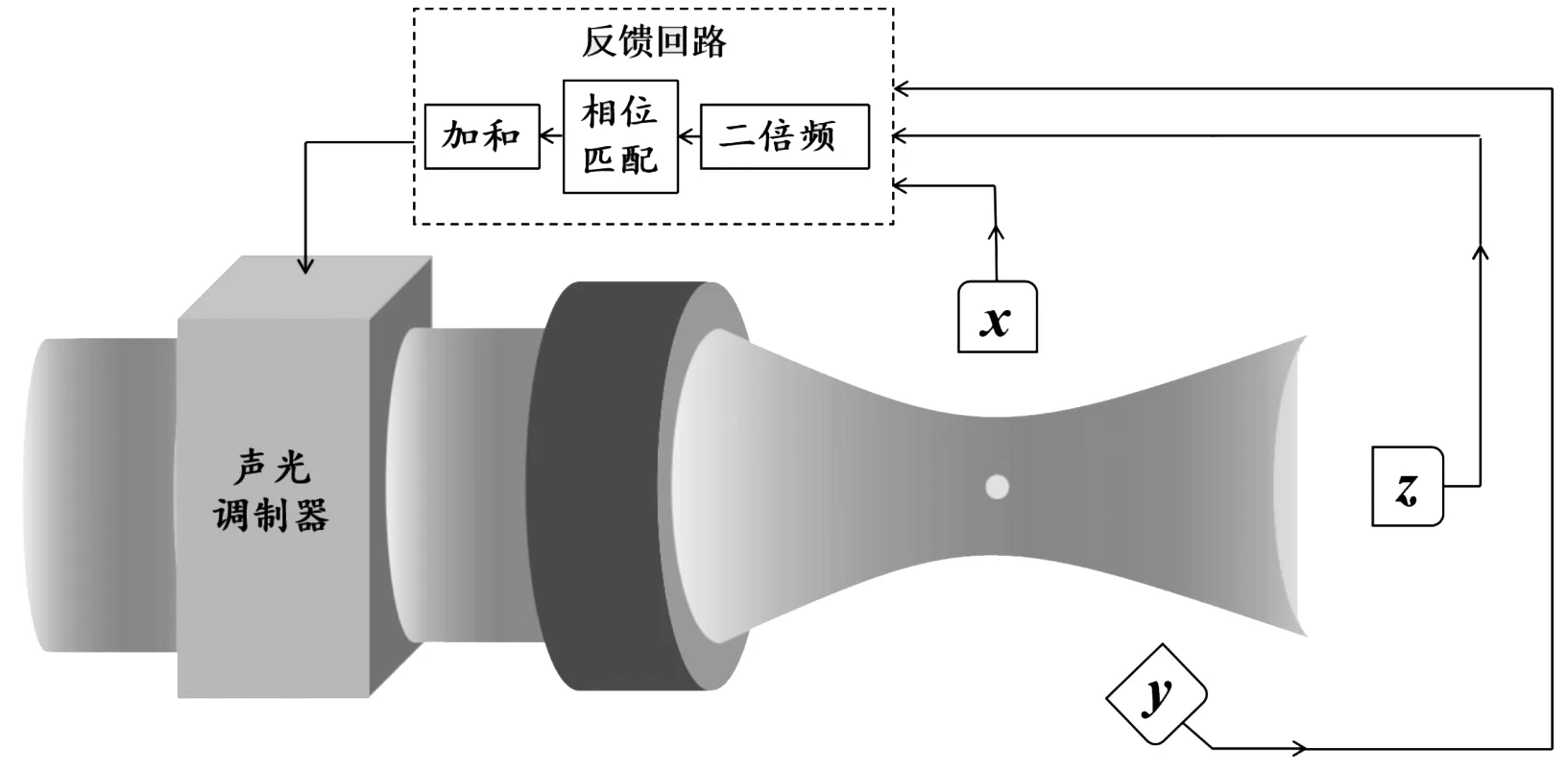
图1 参数反馈实验结构示意图
如图1所示,探测器测量得到微粒的三维位移(x,y,z)信息,通常3个方向相互正交,各方向上的位移之间可近似为相互独立状态。以一维位移x为例,设其谐振频率为Ω0,将位移信号二倍频(2Ω0),并相位匹配(Δφ=0)后作为位移x的反馈信号,其中φ为反馈信号与位移信号之间的相位差异。该反馈信号通过控制声光调制器(AOM)的电压来调控捕获激光束的功率。在开展三维位移反馈时,将三维位移分别对应的反馈信号进行加和(Σ)后,作为三维位移的整体调控信号。该过程可简化为如图2所示。

图2 参数反馈控制流程框图
由于3个方向上的位移通过同一光束反馈控制,容易出现某方向位移得到冷却但另一方向位移被加热的现象,但三轴加和后仍可以实现总体冷却状态[13]。或者也可以采用“少数服从多数”的方案,即至少冷却2个方向上的位移,进而总体上实现冷却[14]。由于三维位移冷却是在一维情形基础上从数学角度出发的应对方案,且三维位移相互独立,因而仿真中只关注一维位移的参数反馈控制。按照控制信号波形的不同,可分为正弦波信号和方波信号,其中方波信号被证实具有更高的调控效率[14],因而仿真中使用方波调控。
2.2 光阱中微粒的动力学模型
在环境气体分子热运动的撞击下,真空光阱中被捕获微粒相对于平衡位置会有位置波动。以一维运动为例,微粒位移q可以用朗之万方程来表示[15]:
(1)
式(1)中:t为时刻;m为微粒质量; Г0为流体阻尼项;Ω0=(κ/m)1/2为谐振角频率;κ是光阱刚度;Ffluct为随机布朗力;ακ为功率调制深度。ακ满足如下关系:
(2)
式(2)中,Pmax和Pmin分别是功率调制时捕获光束最大和最小光功率。
设p为微粒动量,即
(3)
将时间均分为n步,单步步长为Δt,通过蒙特卡洛法和有限差分法,可得到第i·Δt时刻位移q和动量p的表达式为:
(4)
(5)
式(5)中:kB为玻尔兹曼常数;T为环境开尔文温度;W是白噪声。W满足:
〈W(t)〉=0
(6)
〈W(t)W(t′)〉=δ(t-t′)
(7)
2.3 环境阻尼与气体压强之间的关系
环境阻尼可以表示为:[13]
(8)
(9)
式(9)中,d是气体分子平均间距。参数ck可表示为:
(10)
2.4 激光加热效应
在真空光阱中,捕获光束的光子与微粒会发生动量交换,并产生激光加热效应。在光传播方向上,激光加热导致的阻尼为[16]:
(11)
式(11)中,Pscatt=σscattI0为散射激光功率,σscatt为散射光等效面积,I0为等效光强,可分别表示为:
(12)
(13)
式(13)中:P0为捕获光功率;NA为捕获透镜数值孔径;ε0为真空介电常数;k为真空波数,其与捕获光束波长λ的关系为k=2π/λ。系数α可表示为:
(14)
2.5 微球质心运动的等效冷却温度
在被捕获微球的单个运动周期内,参数反馈控制所抽走的机械能等于额外阻尼所做的功,可以得到参数反馈控制所带来的等效阻尼为[14]:
(15)
因而,可得到反馈控制后微球质心运动等效温度Teff为:
(16)
3 动力学仿真
3.1 仿真参数设置
因在真空环境中,若捕获光束为1 064 nm,单光束光阱可捕获的SiO2微球半径为35~120 nm[13-14]。为了避免被捕获微粒因运动幅度过大而出现非线性效应,所选的光阱刚度不宜过小,因而,设置仿真条件如下:半径为70 nm的SiO2微球,密度为2.2×103kg/m3,微球折射率为1.46,光阱刚度为2 pN/μm,环境温度为298 K(约25 ℃),标准大气压下空气粘滞系数取为18 μPa·s,介质折射率为1。设置捕获光束功率为100 mW,物镜数值孔径NA=1.25。不难得到,所设置微粒的谐振频率f0约为126 kHz。设定仿真时间步长为0.2 μs,步数为4×106。
在仿真中,为方便对比无反馈时和有反馈时微球的位移量,假设无反馈时真空光阱中微球没有逃逸,并用于对比和计算微球质心运动的等效温度。
3.2 参数反馈控制下微球的动力学仿真
设置环境气压为1 mPa,调制深度ακ为1%,分别仿真无反馈和有反馈时被捕获微球的位移。由于二者位移差距较大,为了展示区别,绘制了前20 μs时段(约2个周期)内的微球位移曲线,如图3所示。从图3中可以看出,无反馈控制时微球呈现简谐运动,其位移时序为正弦波曲线;有反馈控制时其位移量被逐渐压缩,在第1个和第2个周期内分别被压缩了约1.1 nm和0.9 nm。
由于关注的是位移量的大小而非符号,因此取位移绝对值后,将仿真时段内的位移曲线以双对数坐标的方式展示,如图4所示。
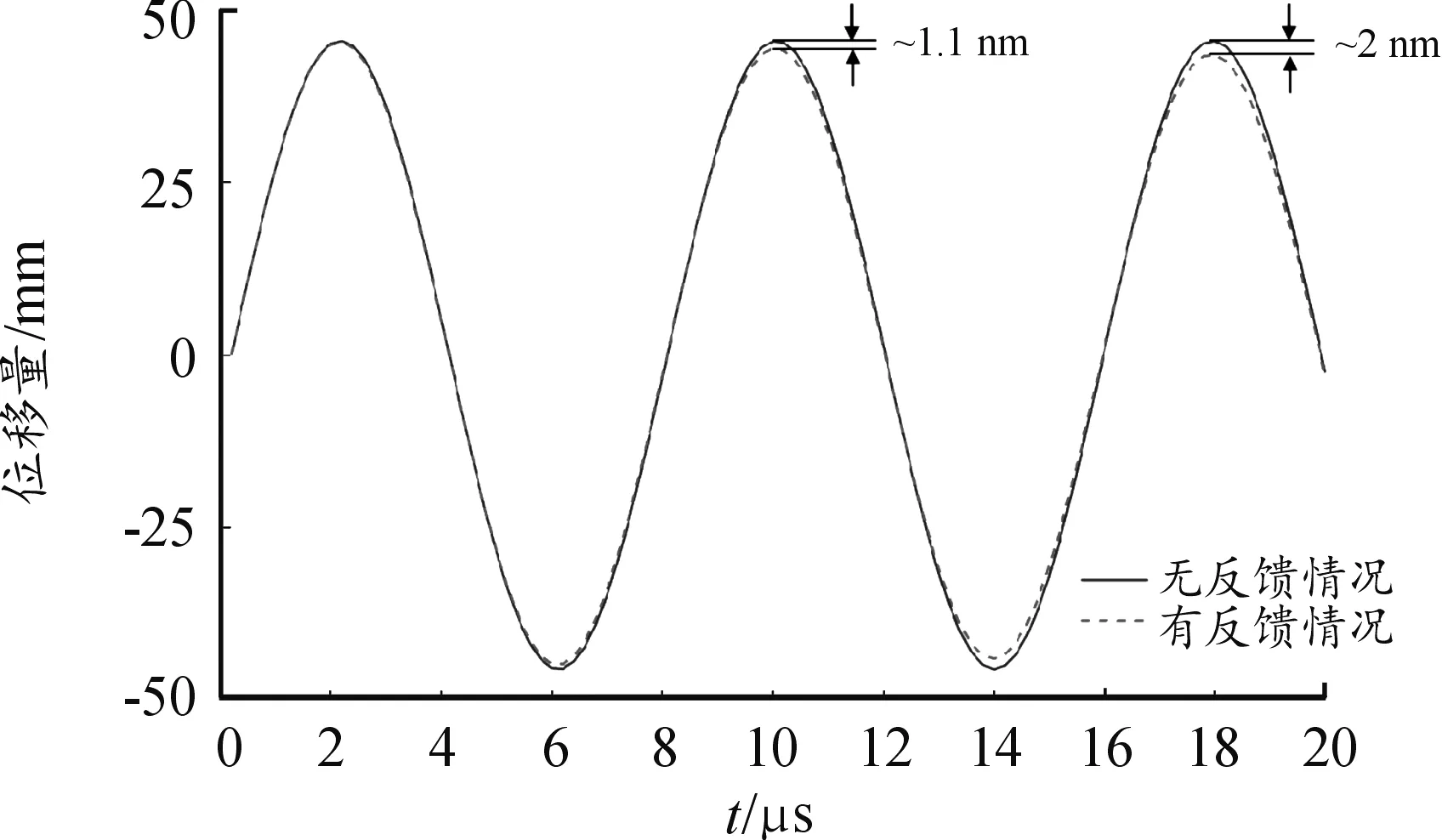
图3 初始20 μs时段内微球位移量曲线
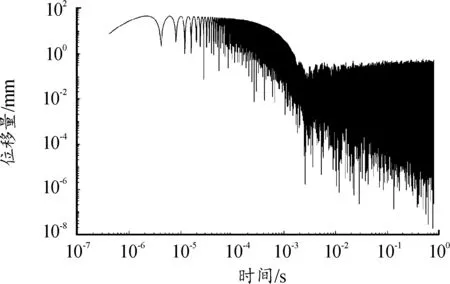
图4 有反馈控制时微球位移量曲线
从图4中可以看出,有反馈控制时微球位移量被快速压缩,在约2 ms后逐渐趋向平稳。无反馈控制时,如图3所示,微球位移为正弦波曲线,其振幅约为45 nm;当施加反馈控制后,如图4所示,微球位移量的最大振幅从约45 nm逐渐降低到约0.2 nm,降低了约225倍。
对被捕获微球的一维运动来说,其在热平衡状态下的平均动能和平均势能均为kBT0/2,即:
(17)

(18)
式(18)中,v1为添加反馈后微粒速率。
由仿真数据和式(18)计算可得,微球质心运动的等效温度为6.1 mK。按照所设置参数,激光加热导致的阻尼率为55 μHz,远小于此时环境阻尼率43 mHz,代入原理公式(16)中,可得理论计算的等效温度极限为5.1 mK。因而仿真数据所得的冷却温度与理论计算值非常相近。
4 参数影响分析
如图4所示,在微球质心运动的冷却过程中,微球位移量逐渐趋向平稳,因而可使用冷却时间和冷却温度来评估冷却效果。下面将分析调制深度、环境气压、微球半径等主要参数对冷却效果的影响。
4.1 调制深度的影响
分别设置调制深度为0.125%、0.25%、0.5%、1%、2%,环境气压为1 mPa,其余参数与3.1节相同。仿真得到不同调制深度下冷却温度和冷却时间如图5所示。因仿真数据中夹杂有热运动所带来的白噪声,所展示的冷却温度是30次运行后的结果,将其均值和标准差用于绘制图5中的误差条。
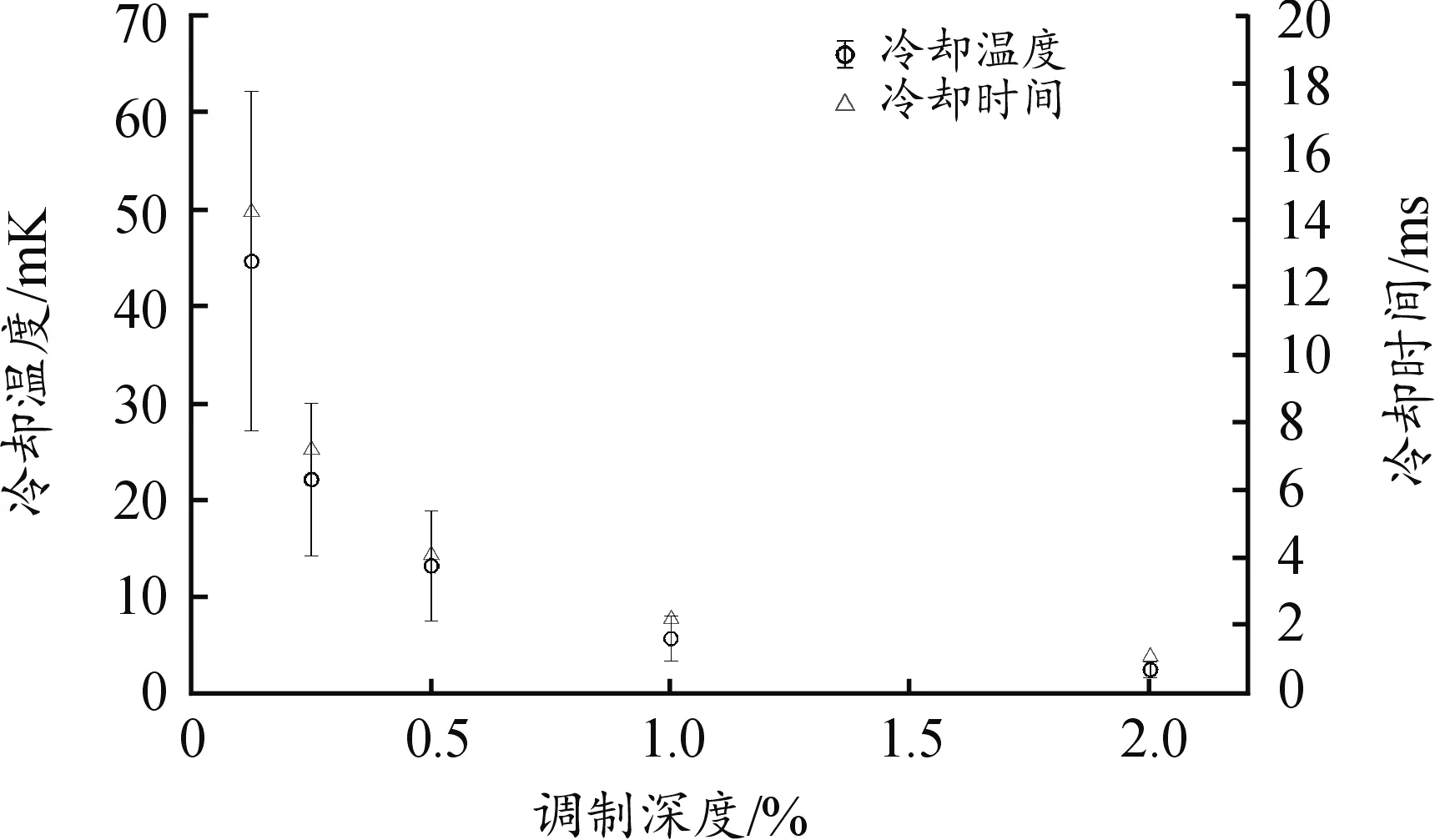
图5 不同调制深度下的冷却温度和冷却时间图
从图5中可以看出,在1 mPa气压环境下,随着功率调制深度的增大,冷却温度和冷却时间均逐渐降低,且趋势逐渐放缓,这与实验中观测的结果一致[14]。
4.2 环境气压的影响
分别设置环境气压为1 kPa、10 Pa、0.1 Pa、1 mPa、10 μPa、0.1 μPa,调制深度为1%,其余参数与3.1节相同。仿真得到不同环境气压下冷却温度和冷却时间如图6所示。与图5类似,所得冷却温度采用30次仿真结果的均值和标准差来绘制误差条。由于1 kPa气压时微球位移并没有得到反馈冷却,因而图6中没有展示该气压下的数值。
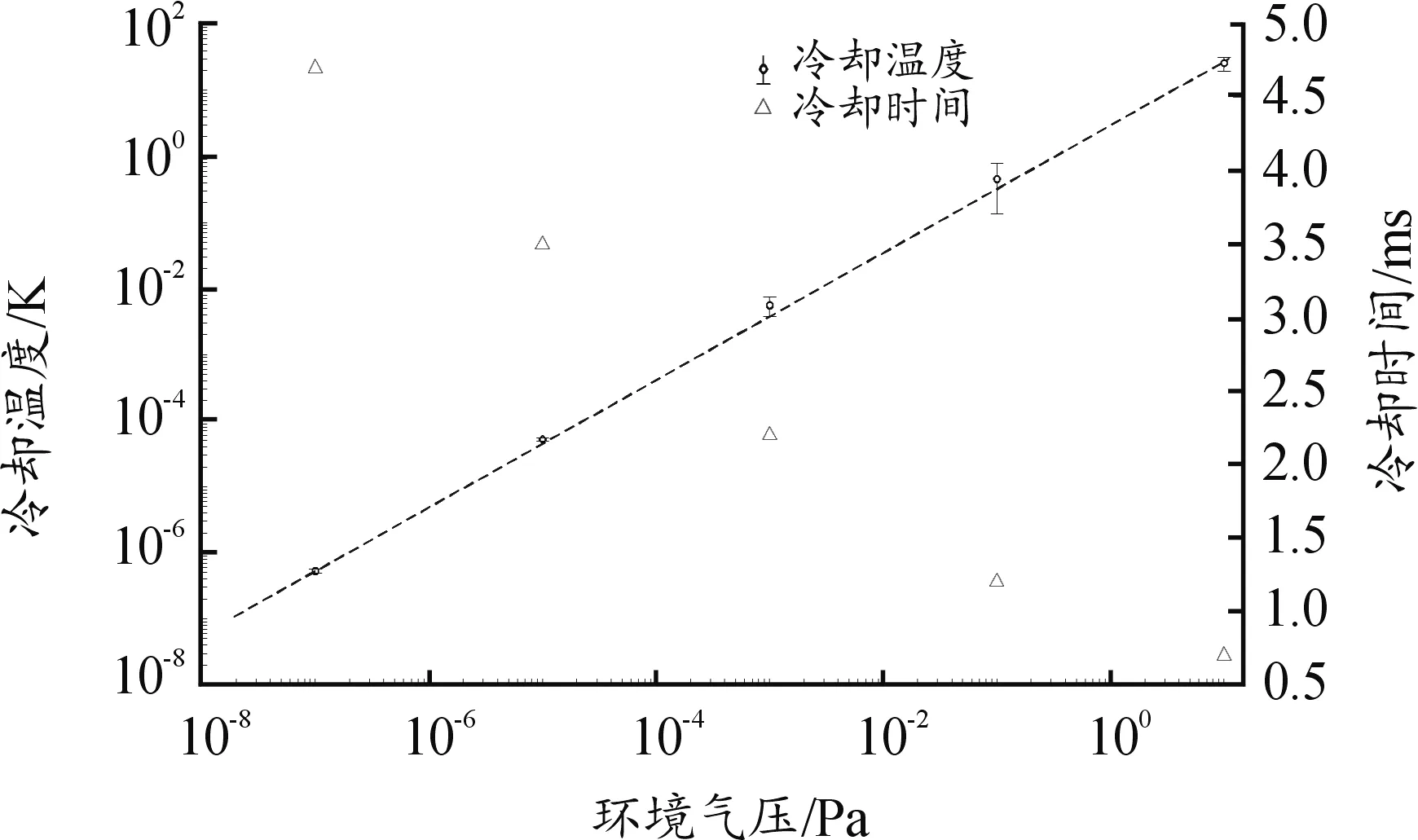
图6 不同环境气压下的冷却温度和冷却时间曲线
从图6中可以看出,随着环境气压的降低,冷却温度逐渐降低,冷却时间逐渐增长。若要取得明显的冷却效果,如1 K以下的等效冷却温度,环境气压应低于10 Pa。同时,冷却温度随环境气压的变化趋势在对数坐标系中呈现出近似线性关系,这与真空环境中微球所受环境阻尼与气压之间近似线性关系的规律一致。
以0.1 μPa的高真空环境为例,环境阻尼率为4.31 μHz,而此时激光加热效应带来的影响约为55 μHz,已远大于环境阻尼率,激光加热效应将逐渐发挥显著作用,进而干扰反馈冷却。
4.3 微球半径的影响
分别设置微球半径为60 nm、70 nm、80 nm、90 nm和100 nm,调制深度为1%,环境气压为1 mPa,其余参数与3.1节相同。仿真得到不同微球半径下冷却温度和冷却时间如图7所示。同理,所得冷却温度采用30次仿真结果的均值和标准差来绘制误差条。
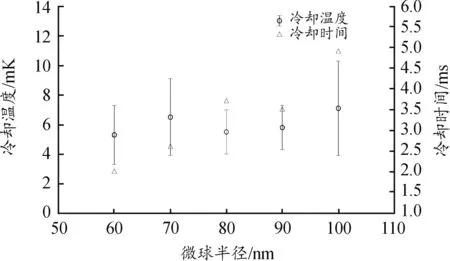
图7 不同微球半径下冷却温度和冷却时间图
从图7中不难看出,微球半径r对冷却温度和冷却时间影响较小。在本节的参数设置中,不同半径微球使用了相同的光阱刚度κ和调制深度α,在式(16)中,阻尼率Г0大致与r2成反比,Ω0大致与r3/2成反比,此时激光加热效应所致的阻尼率Гrecoil很小。由于Г0<<αΩ0/π,因此等效冷却温度极限大致与r1/2成正比。在所设置的半径范围中,最大值仅是最小值的1.67倍,所导致的冷却温度值变化可能还不足以超过仿真结果的误差值,因而导致出现了如图7所示的情形。
综上所述,对于冷却温度和冷却时间影响程度由强到弱的顺序大致为:环境气压>调制深度>微球半径。一般而言,冷却温度越低,所需的冷却时间越长。
在0.1 μPa至10 Pa的环境气压范围内,冷却温度随着环境气压的降低而呈现近似线性降低的趋势。在高于10 Pa的气压环境中,几乎无显著的冷却效果(等效冷却温度<1 K);在低至0.1 μPa环境气压量级时,激光加热效应将逐渐发挥作用,进而影响冷却效果。
在所分析的0.125%~2%的调制深度范围内,冷却温度随着调制深度的增大而降低,但趋势逐渐变缓,这符合实验中调制深度增大到一定程度后冷却温度很难再降低的现象。
5 结论
建立了真空光阱中微球在参数反馈控制下的动力学理论模型,使用蒙特卡洛法和有限差分法仿真了光阱中被捕获微球的动力学过程,在设定的光阱参数下微球质心运动可在ms时段内被冷却到μK量级;主要参数对冷却效果的影响程度大致为:环境气压>调制深度>微球半径。仿真结果有助于真空光阱系统的优化设计,可为真空环境双光束光阱中微球的参数反馈冷却提供重要的参考。