大高差地形条件下大比例尺航空摄影的设计与实现
2021-12-01郭威
郭 威
(江苏省地质矿产调查研究所,江苏 南京 210049)
0 引 言
本项目位于国家某森林公园,具有地势高,起伏大,多垭口的地貌特征;最高处达2 158 m,最低处仅180 m,平均海拔1 200 m,高差极为悬殊。森林公园内沟谷相间,山势雄伟,河流侵蚀切割深度达500~1 000 m;海拔2 000 m以上的有7座,主峰2 158 m,也是华东大陆最高峰;另有1 000 m以上的山峰达377座;区域内沟壑纵横,溪流交错,各类溪流多达150余条。根据以上地形地貌条件综合分析,该地区地形高差极大,实施大比例尺影像获取十分困难。摄区地形如图1所示。

图1 摄区DEM渲染图
1 航空摄影技术设计
1.1 航空摄影技术路线
航空摄影实施一般包括资料的收集、航摄飞行的设计、航摄任务的执行[1]、数据的预处理、成果质量检查及资料的整理与移交等环节。作业技术路线如图2所示。
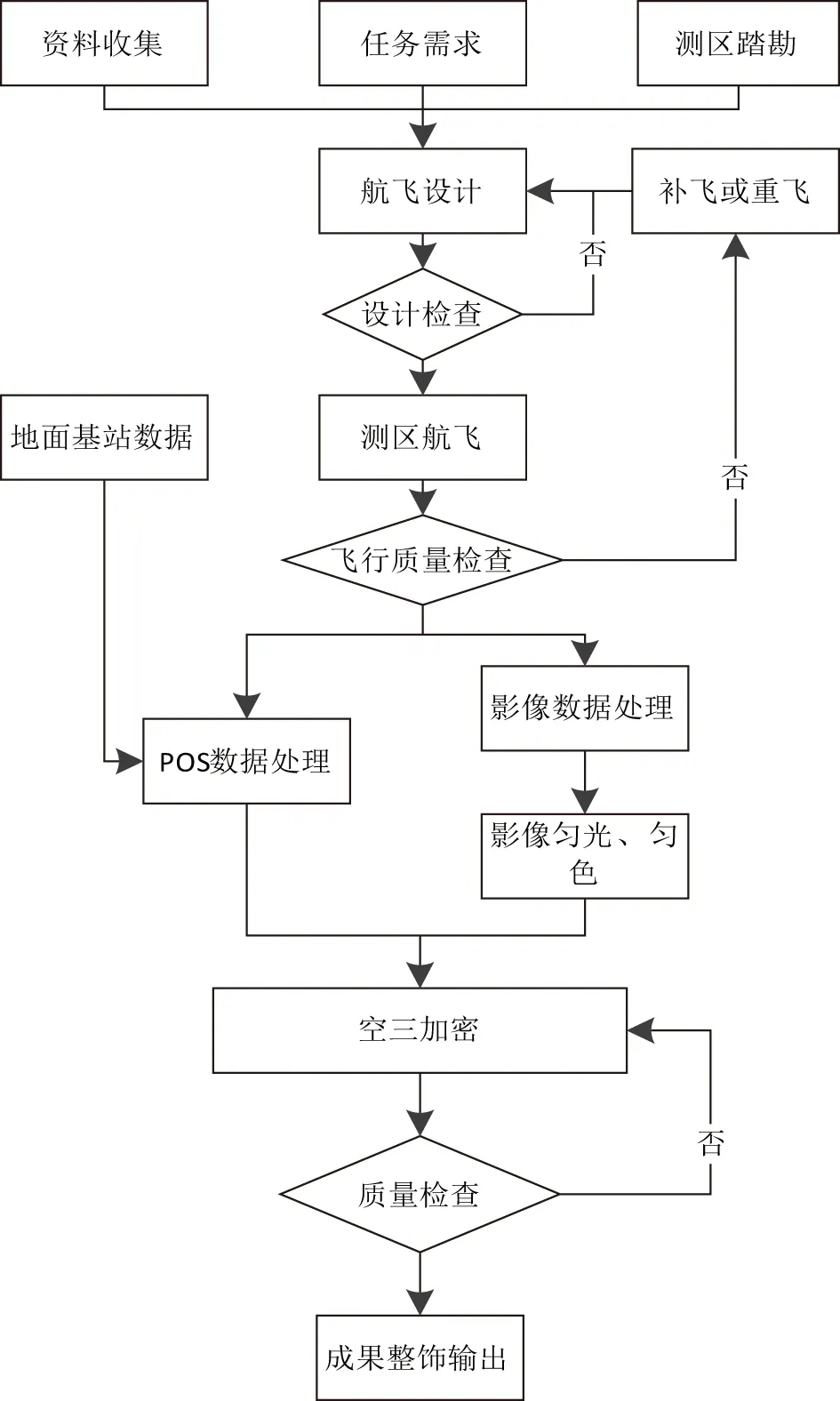
图2 作业技术路线图
1.2 航空摄影技术方案
1.2.1 航摄分区及航线设计原则
(1)航线敷设和分区时,根据IMU误差积累的指标确定每条航线的直线飞行时间一般不超过25 min。
(2)旁向重叠应达到20%,特殊情况下最小重叠度不得小于13%;丘陵、山地及建筑物密集地区,设计时适当加大重叠;航向起始和结束应超出半幅图幅范围,旁向应超超出半幅图幅范围,超出部分不应小于500 m,且不大于2 000 m。
(3)航线敷设原则上要求按常规方法敷设,对于不规则测区,可根据测区范围、测区内地形特点等因素采用特殊方法敷设。
1.2.2 航摄各分区基准面确定
根据以上原则,按照飞行速度260 km/h,25 min飞行距离为109 km,测区最大跨度东西方向小于108 km。
(1)区最高点2 150 m,最低点370m,高差很大且全区高程普遍偏高,综合考虑分辨率和飞行安全高度、飞行安全距离的情况,设计基准面为1 000 m。
(2)区最高点1 520 m,最低点270 m,高差较大。低点少量分布在山谷河流地区,综合考虑分辨率和飞行安全高度的情况,设计基准面为700 m。
(3)区最高点700m,最低点180m,高差较大且低点较为分散,大多处于河谷河流地区,综合考虑分辨率和飞行安全高度的情况,设计基准面为300 m。
摄区各分区如图3所示。

图3 摄区分区图(UCEM3)
1.2.3 飞行航线敷设要求
本摄区设计航线敷设方向为西南至东北方向,影像航向重叠68%,影像旁向重叠30%,航向超出范围线≥500 m,旁向覆盖超出测区边界≥500 m。
1.2.4 航摄因子确定
根据本次项目的地形特征和对影像数据的技术要求,设计航摄因子如表1所示。
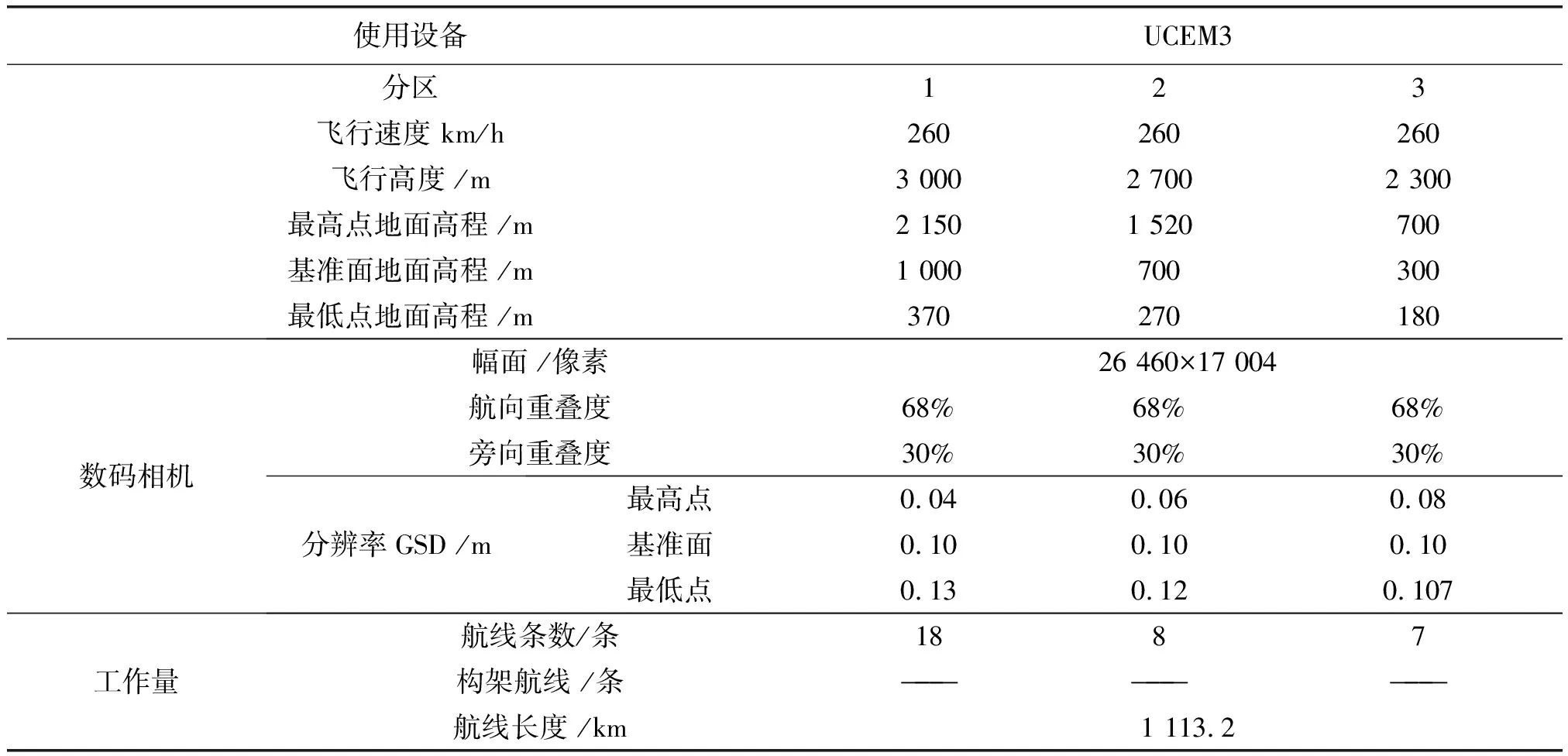
表1 航摄因子表
1.3 航摄飞行的质量要求
(1)在飞机起飞前以及降落后POS系统需要据开始和停止记录的时间,由于设备使用机上电源供电且中间不能断电,故要求在静态观测时间内飞机发动机保持开车状态,在停止数据记录后才可停机。
(2)飞机滑行期间应避免附近有高大树木或建筑物等遮挡,以免造成GNSS卫星信号失锁。
(3)飞机上升下降速率不宜大于10 m/s,且飞行过程中转弯坡度不宜超过20°。
(4)若航摄飞行中出现GNSS信号失锁时,应立即终止摄影,并在信号恢复正常6 min后再进入航线进行摄影。
(5)进入测区航线时,应采用左转弯和右转弯交替方式飞行,每次直线飞行时间不应大于25 min。
(6)飞机进入第一条航线前和最后一条航线后须进行5 min平飞后进行S形或8字形飞行,之后再进行最多5 min的平飞。
(7)航线旁向重叠大于20%,最少应达到13%;丘陵、山地及建筑物密集地区,设计时适当加大重叠。
(8)同一航线航高变化不大于相对航高的10%,实际航高变化不大于设计航高的10%。
2 项目实施情况
2.1 项目软件和硬件的配置
根据项目飞行任务,使用一架P750飞机搭载UCEM3数字航摄仪(内置IMU/DGNSS惯性导航测量系统)执行本项目的航摄任务,本项目相关的软、硬件设备和航摄仪参数如表2和表3所示。

表2 本项目软、硬件配备表

表3 航摄仪参数表
根据以上技术参数表可知,本项目所选航摄仪完全满足并优于规范[2]对航摄仪的选择的要求。
2.2 航摄影像数据处理流程
利用UC系列航摄仪自配软件UltraMap对数据进行处理,它采用微软最新Framework及Dragonfly技术,管理原始数据的下载、分布式0~2级、2~3级数据的处理,最后3级影像的命名与输出,影像数据处理流程如图4所示。
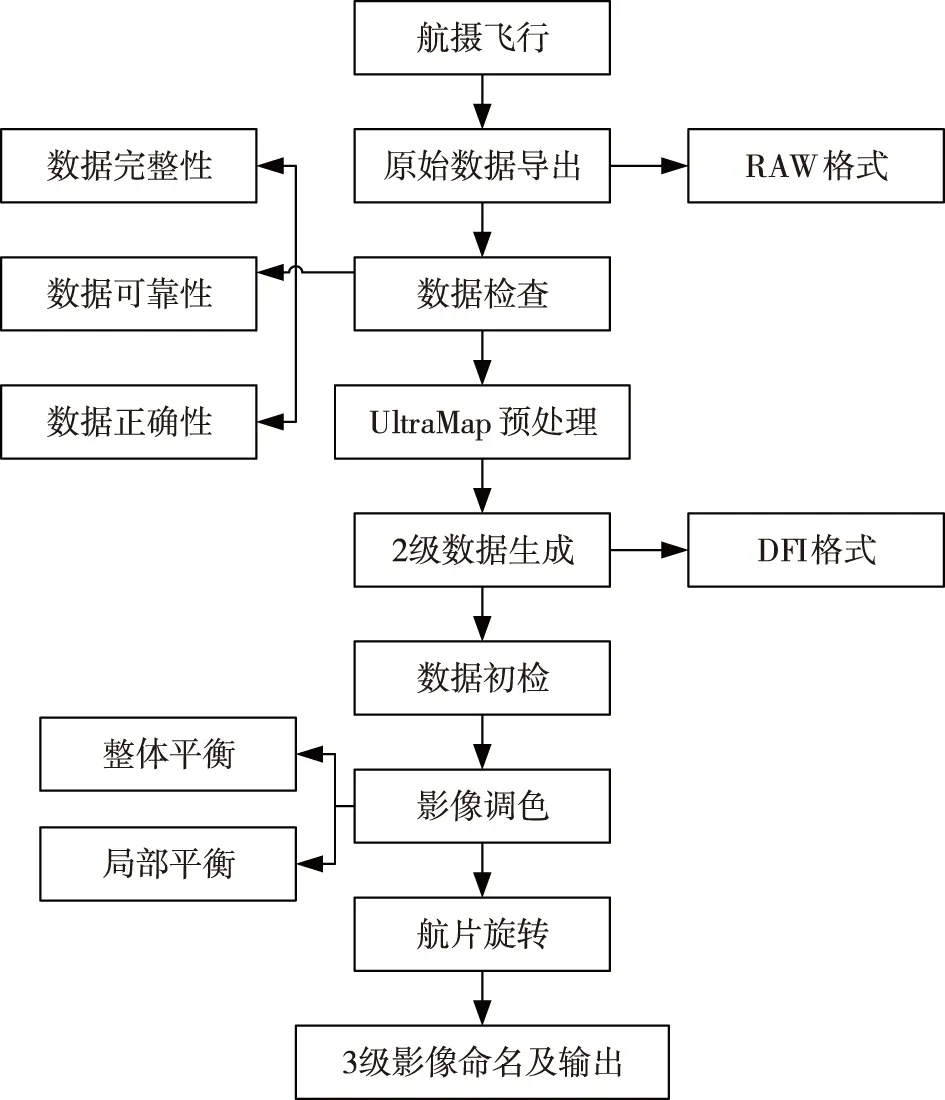
图4 影像数据处理流程图
在影像预处理的过程中,一般只针对航摄数据色调做统一平衡调整。在软件中设置同一个调色模板,使得同一架次的影像数据使用统一的调色参数,确保了单架次的影像数据色彩一致性。
2.3 POS数据和地面基站数据的联合解算
(1)首先对POS原始数据进行解压,分离出机载GNSS数据与IMU惯导数据,然后结合地面GNSS基站数据进行差分处理,最后利用差分成果与IMU数据联合解算,解求定向定位数据。
(2)每个架次飞行结束后,应对IMU/DGNSS原始数据进行预处理、检查,包括基站GNSS观测数据、机载GNSS数据、IMU记录数据以及Logdata日志数据,并填写《航摄飞行记录表》。
(3)使用Applanix公司开发的POSpac软件对POS数据进行解算[3]。
2.4 项目成果质量情况
依照规范[4]要求,航摄任务完成后对影像数据成果进行了全面的检查,航向重叠57%-83%,旁向重叠15%-69%,影像数据色彩均匀饱满、层次丰富、反差适中,数据质量优良,满足规范[5]和项目技术设计的要求。
3 结 语
通过本项目的实施和对大高差地形条件下航摄技术特点的研究,我们认为在类似项目中应注意以下几点:
(1)当航摄比例尺较大时(如大于1/7 000),摄影分区内的地形高差一般应控制在1/6相对航高以内。
(2)摄影分区应考虑后续加密方法和布点方案的要求,在地形高差许可的情况下,尽量划大航摄分区的跨度。
(3)当地面高差突变、地形特征显著不同时,可在保证飞机的安全距离与安全高度条件下增加分区。
(4)同一分区内的地物反差、地貌类型应尽量一致,以便于后期影像处理。
(5)当采用GNSS辅助空三作业时,摄影分区还应保证分区界线与加密分区界线的兼容性。
