机载激光雷达在公路勘测及BIM设计中的应用研究
2021-12-01杨凯文
杨凯文
(华设设计集团股份有限公司,江苏 南京 210014)
0 引 言
随着高速公路的快速发展,高速公路建设对勘察设计企业提出了越来越高的要求,更快地提供更稳定的设计方案以及更短的设计周期都对新技术手段的应用提出了需求。勘测作为公路勘察设计项目前期必不可少的一项工作,在提供项目周边地理环境和设计所需基础测绘资料中发挥着重要的作用。然而传统的测绘方式存在时间长、效率低等问题,无法应对越来越多时间紧迫的设计项目。
激光雷达作为一项新型的航空测量技术,具有快速、高效、精度高等优势,已在一些行业得到了较为广泛的应用。在公路勘察设计领域,近年来已有一些学者进行了研究工作。陈璞然[1]、辛恕杰[2]、晏玲[3]、张熙[4]等都对机载激光雷达技术在公路勘察设计中的应用及关键技术进行了研究,其中辛恕杰等[2]在文中提到机载激光雷达可用于制作真三维模型。田先斌等[5]对激光雷达航测技术用于场区测绘以及与BIM技术相结合开展规划设计进行了探索研究。王涛[6]、徐景瑜[7]、张丽军[8]等以山区高速公路为案例,介绍了机载激光雷达在山区高速公路勘察设计中的应用,其中王涛[6]在最后提到了机载激光雷达用于真三维和BIM设计。余飞等[9]研究了机载激光雷达测量成果与公路CAD的协同设计。余绍淮等[10]以改扩建高速公路为例,研究了基于机载激光雷达的道路标线提取和纵横断面自动生成技术。
可见,机载激光雷达技术在公路工程中的应用已有一些研究成果,但至今尚未形成较为成熟的应用模式,与BIM新技术的结合应用更是缺乏研究和项目实践。为此,本文结合在公司承接的公路二三维设计项目中的实践,对机载激光雷达在实际勘测设计中的工作流程以及成果的应用特别是与BIM三维设计的结合进行了探索和研究,最后对激光雷达技术的进一步发展方向进行了展望。
1 系统组成及工作原理
激光雷达,又称LiDAR(Light Laser Detection and Ranging),是激光探测及测距系统的简称,由激光扫描仪、全球定位系统(GPS)、惯性导航系统(INS)组成,现在大多数都集成了航空数码相机。
激光雷达通过发射激光、记录激光发射和返回的时间,计算发射激光器和反射物体点间的距离,结合GPS测量的激光器位置以及IMU测量的激光器姿态,得到反射物体点的位置,从而形成“点云”(带有三维坐标的点的集合)。
机载激光雷达除了以上系统组成外,还包括承载激光雷达系统的无人机设备,不同的无人机电池容量、最大载重、续航时间、巡航速度等参数不同,不同厂家生产的还涉及稳定性等差异,这些是在设备选型时需要考虑的;同样,不同配置的激光雷达系统如测距、频率、精度限制等也决定了其适用的项目不同,所以设备的选型是机载激光雷达在项目中应用需要考虑的一个重要因素。
2 技术路线
公路勘察设计项目一般可分为新建工程和改扩建工程,设计阶段包括工可(可行性研究)、初设(初步设计)和详设(施工图设计)3个阶段,每个阶段前期都需要相应的勘测工作。对于新建公路工程,工可阶段需要测绘或获取较小比例尺地形图和卫片;初设阶段需要初测,主要包括平面和高程控制测量以及带状地形图测绘;详设阶段需要定测,主要包括路线中线测量和纵横断面测绘。改扩建公路工程的勘测较新建工程减少了选线测量,主要是对现状道路测绘,包括平面、纵横断面和地形测绘;初测和定测内容基本相同,区别在于初测较为简略,而定测则应详细。
机载激光雷达用于公路勘测主要就是通过一系列的过程提供所需成果,其技术路线包括前期准备工作、外业数据采集、内业数据处理和数字化生产、精度检测和成果应用。总体技术流程如图1所示。

图1 总体技术流程
2.1 前期工作和外业采集
前期工作主要包括控制测量、测区踏勘、飞行方案的确定等。
对于公路工程项目,用于机载激光雷达的控制测量一般是沿线布设若干控制点,虽然大多数LiDAR系统都已集成POS系统(定位和惯导系统的组合),可以做到航空摄影测量中的“免像控”,但一方面要保证足够的精度,需要提供基站点更精确的坐标(差分GPS使用)。另一方面,为了控制投影变形,特别是对于公路项目这类条带状工程,项目坐标系一般采用偏移了标准分带中央经线的自定义坐标系;控制测量可提供控制点在数据采集坐标系(本文中的激光雷达设备采集坐标系为WGS84)和项目坐标系下的两套坐标,通过计算转换参数将采集的数据转换到项目坐标系下。需要说明的是,控制点的布设密度和对数据成果的精度要求相关。
测区踏勘主要是提前了解飞行区域内的地形地貌、植被等环境情况,寻找合适的起飞点、规划航线,为外业数据采集做准备,还需要注意高压线(塔)、高层建筑物等会影响飞行的地物要素。外业数据采集前的测区踏勘对于地形和环境复杂的项目尤为重要,可以提高实地外业采集工作的效率。
飞行方案包括测区飞行航带的划分、飞行航线的设计以及飞行参数的计算等,方案的确定需综合考虑项目特点、现场环境、设备配置以及对成果的要求等因素。公路项目一般为条带状工程,可沿道路走向划分飞行航带,航带的划分和飞行航线的设计需考虑设备一个架次可以飞行的时间,受设备续航能力和电池容量等限制,不同配置的无人机搭载激光雷达系统一个架次的飞行时间有限,这也是安全飞行需要考虑的一个主要方面。
外业采集工作包括基站的架设和观测、控制飞行、传输数据等,如上所述,控制测量可提供基站点更精确的坐标,基站一般架设在当前飞行区域附近的控制点上。一个架次的飞行结束后需将采集的原始数据传输到本地,采集的原始数据包括原始的轨迹数据、原始的激光数据以及原始的影像等。
2.2 数据预处理
机载激光雷达的数据预处理主要就是将采集的原始数据经过一系列的处理生成标准格式(一般为LAS格式)的点云数据(结合采集的影像数据可生成真彩色),点云数据是后续数字化生产的基础。原始数据包括基站观测数据和2.1中提到的激光雷达系统采集到的原始数据,具体流程包括轨迹解算(本文中采用POSPac轨迹解算软件,具体和设备相关)、激光数据裁剪、LAS格式(真彩色)点云数据生成,如图2所示。
7 投稿方式 投稿请发电子邮件(邮件主题写第一作者姓名和文题),本刊E-mail:zacaoxuebao@163.com或zckx@jaas.ac.cn。审稿时间一般为20天左右,特别优秀的稿件可加快处理。录用通知将通过电子邮件通知作者,投稿后请注意查看E-mail。
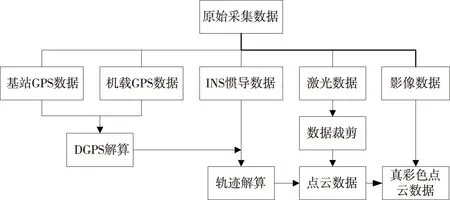
图2 预处理流程图
轨迹解算的原理是通过基站的GPS观测数据与激光雷达系统的GPS数据做后差分,结合INS惯导数据,联合解算出轨迹数据。原始采集的激光数据有些是多余的,如起飞点到航线起点、航线间切换以及返回过程采集的激光数据,对这些数据进行裁剪可减少数据量,提高数据处理的效率。使用解算出的轨迹对经过裁剪的原始激光数据进行处理,生成LAS格式的点云数据,结合采集的原始影像数据,可生成真彩色点云数据。本文所采用的预处理软件可实现真彩色点云的同步生成,无须在先生成点云数据的基础上,再用影像对其赋色。图3为本文预处理的一个架次的真彩色点云。
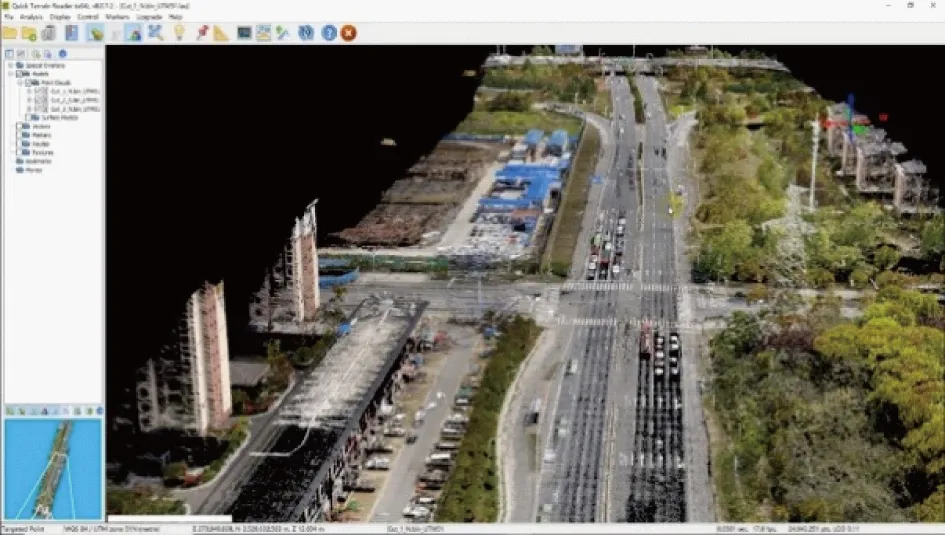
图3 真彩色点云
2.3 数字化生产
机载激光雷达用于公路勘测最终体现在为公路设计提供所需的勘测成果,包括地形图、数字地面模型(DEM)、数字正射影像(DOM)、纵横断面数据等。机载激光雷达的数字化生产就是在预处理生成点云数据的基础上进一步生产各类数字化成果,包括利用控制点的两套坐标和高程将预处理的点云转换到项目坐标系下,生产DEM、等高线、纵横断面、DOM和DLG等,结合外业调查可进一步生产地形图,具体根据项目需求确定,技术路线如图4所示。
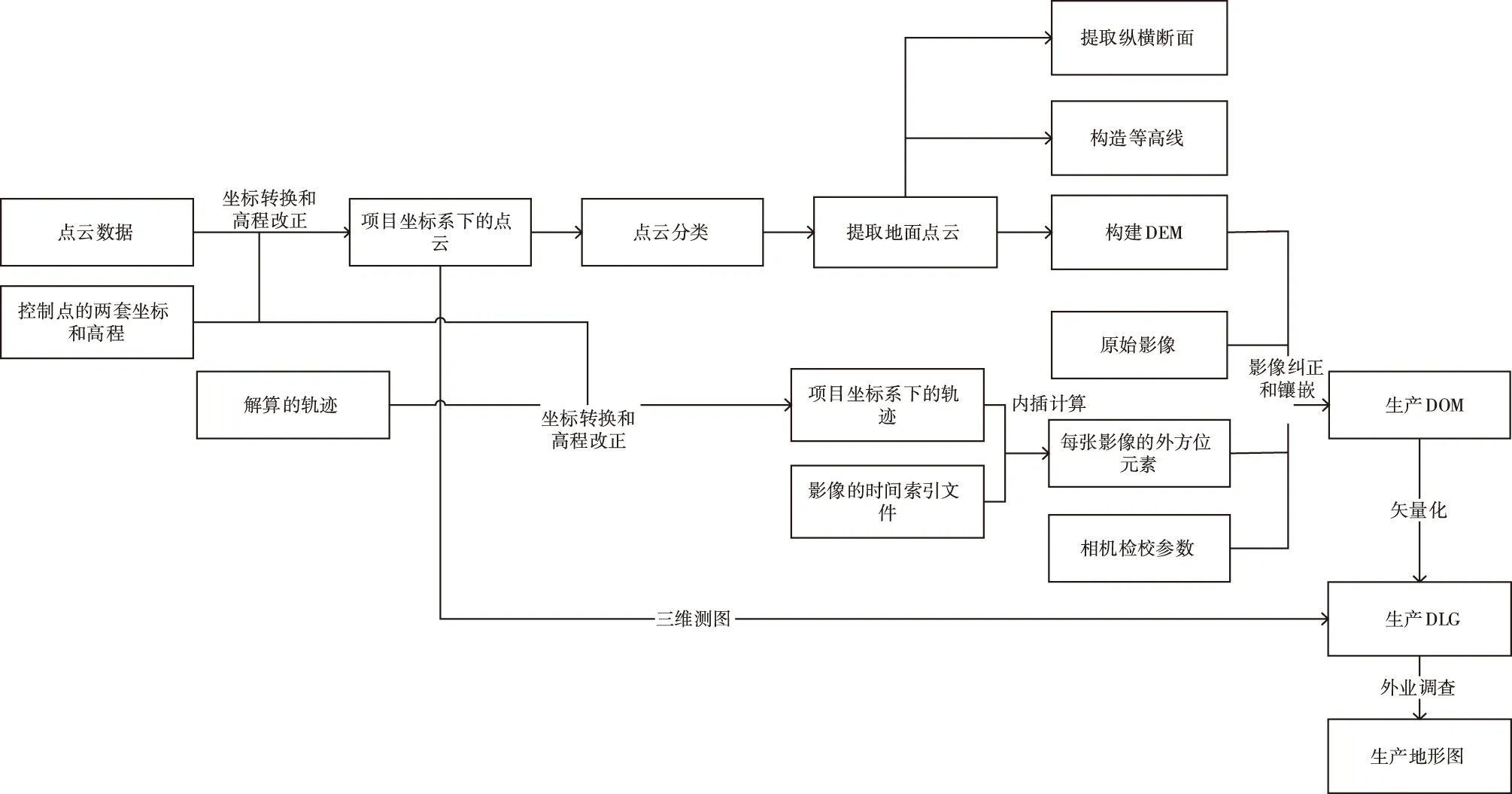
图4 数字化生产技术路线
生产出的数字化成果只有在项目坐标系下才具有真实的使用价值,如上所述,工程项目特别是公路工程这类条带状项目,为了控制投影变形,一般会采用项目独立坐标系。控制测量可提供沿线控制点在项目坐标系下的平面坐标和高程,利用控制点在采集坐标系和项目坐标系下的两套坐标和高程,计算转换关系,通过坐标转换和高程改正,将预处理生成的采集坐标系下的点云数据转换到项目坐标系下。
DEM的生产主要是通过点云的分类、提取地面点云,从而构建出数字地面模型。点云的分类即是为每个点分配一个语义标记,将其划分到实际的分类中,点云分类是后续数据处理的基础。目前大多数的点云处理软件一般是根据采集的激光数据的特征结合一定的算法对点云做分类,但都无法实现100%的准确率,还需要结合人工的检查进行修正。从分类的点云中提取出地面点,可用于构建DEM、构造等高线以及提取纵横断面数据等。
采集的原始影像数据中除了每张影像的文件外还包括影像序列的时间索引文件(每张影像的曝光时间及相应的文件名),根据前面经过解算和转换到项目坐标系下的轨迹数据,内插计算每张影像的外方位元素,结合原始影像以及相机检校参数,经过地面点云构建的DEM纠正,生成数字正射影像。图5为本文生产的一个架次的DOM成果。
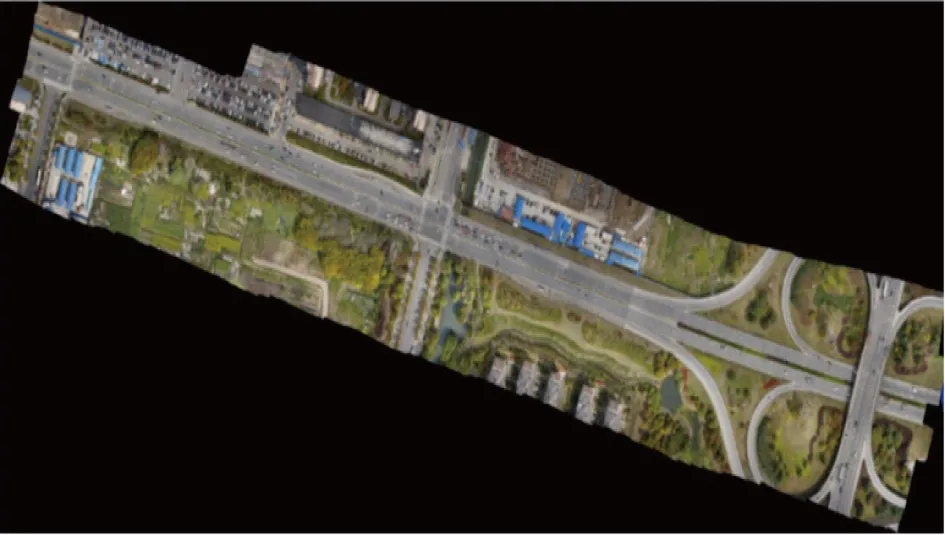
图5 DOM(数字正射影像)
目前生产DLG和地形图的软件主要分为两种,一种是基于正射影像的二维矢量化,另一种是直接基于点云数据的三维测图,实际生产中,可两者结合起到相互补充和参考的作用,提高地物矢量化的效率和精度。对于没有采集到或者采集数据不全的区域,还需要外业调查工作辅助内业绘图,最终形成地形图成果。本文所采用的三维测图软件,可同时打开多个视图窗口联动作业,生产效率较高。图6为本文生产的一块区域的DLG成果。
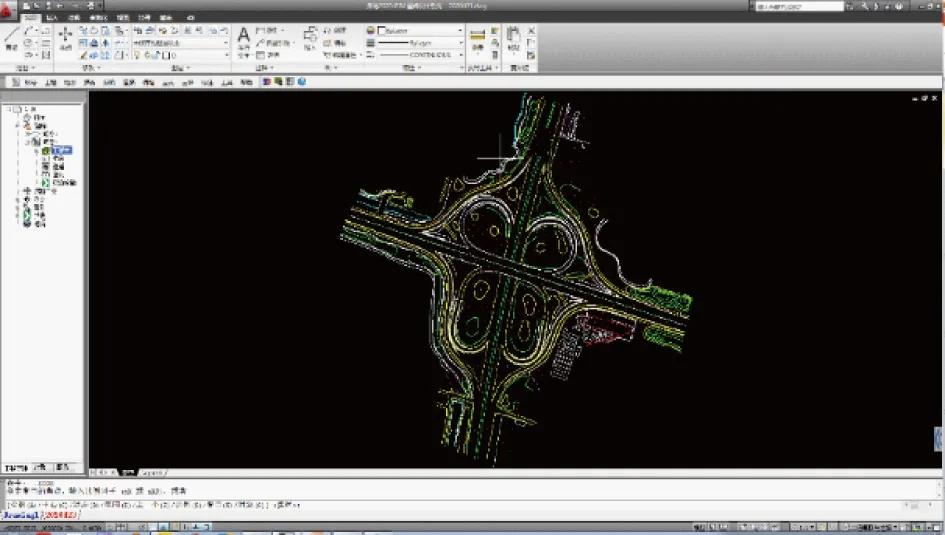
图6 DLG(数字线化图)
2.4 精度检测
数据成果最终的精度受数据采集和处理过程中很多因素的影响,为了确保成果能够在项目中使用,需要对成果的精度进行检测,参照国家或行业规范,检验其是否符合规范中相关规定,满足项目对数据成果精度的要求。精度检测一般分为平面精度检测和高程精度检测,实地通过传统的测量方法分别采集一定数量的特征点的平面坐标和高程,与机载激光雷达采集和处理的数据成果进行比较,可计算出相应的精度。
《公路勘测规范》(JTG C10-2007)中对公路工程地形图的平面和高程的精度要求进行了规定。本文采用GPS RTK方法采集了10个道路标线特征点的平面坐标,与生产的DOM上相应特征点的平面坐标相比较,经计算平面精度(中误差)为±0.073 m,如表1所示;高程精度检测采用四等水准测量的方法采集了13个道路路面点的水准高程,与点云中相应点的高程相比较,经计算高程精度(中误差)为±0.048 m,如表2所示。结果表明了在未进行靶标纠正的前提下,本文采用的激光雷达设备在平原地区满足平面≤±10 cm、高程≤±5 cm的精度要求,按照公路勘测规范,可达到1∶500地形图的精度要求。
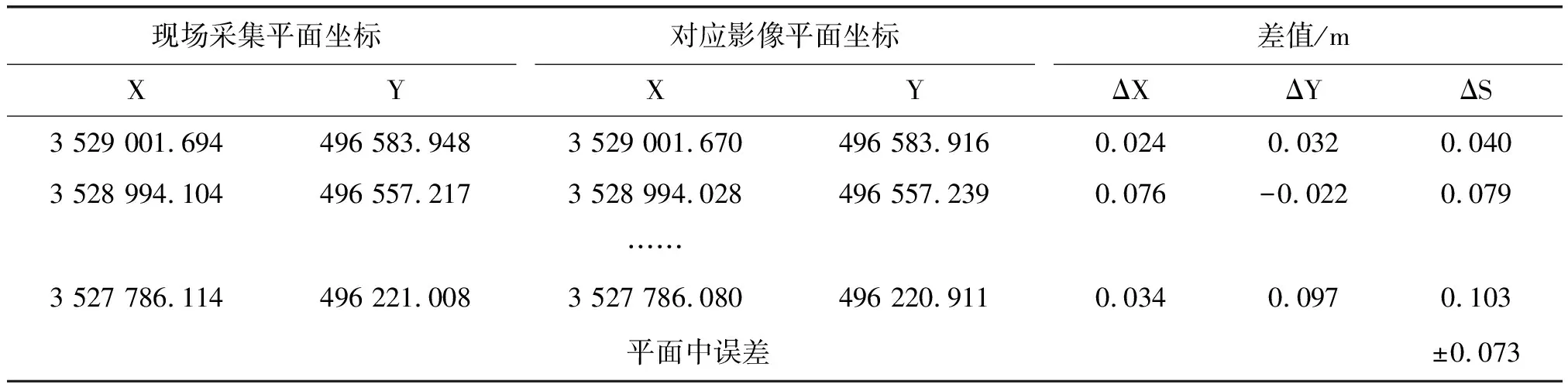
表1 平面精度检测
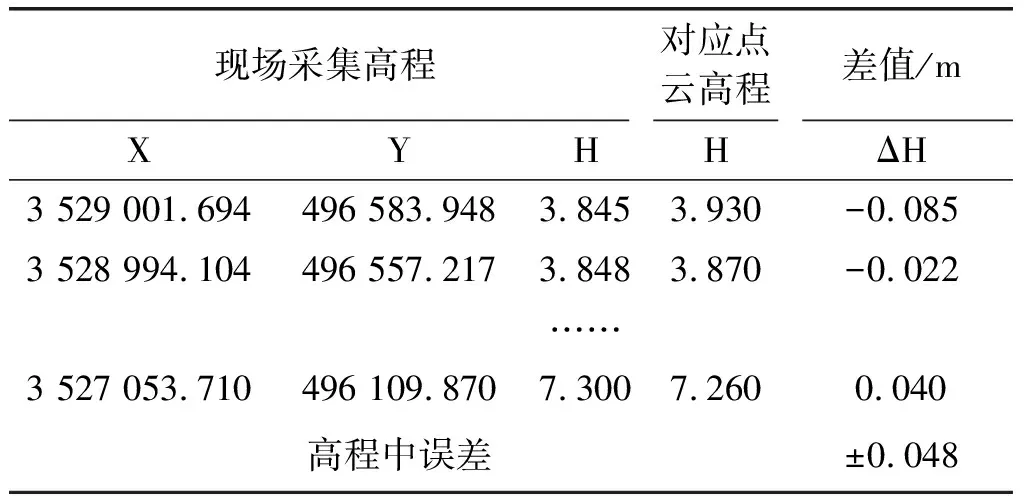
表2 高程精度检测
3 成果应用
机载激光雷达在公路勘察设计传统二维设计中的应用就是通过以上技术流程生产各类成果,满足公路勘察设计项目在不同设计阶段的勘测成果需求,并进一步为设计应用服务。在BIM三维设计中的应用,目前尚缺乏参考,通过研究,取得一些成果,有望之后做进一步深入的研究和应用。
3.1 在传统二维设计中的应用
在传统公路测设中,通常需先获取较小比例尺地形图辅助前期道路选线,再人工测量大比例尺地形图和采集纵横断面数据用于详细设计,机载激光雷达技术因其高精度、成果丰富的优势可一次性满足两次测设的要求[8]。特别是随着激光雷达技术的不断发展,而传统测量方式效率低、环境复杂项目难以施测等,以低空无人机作为载体的激光雷达测量方式在公路测设中的应用价值体现得越来越突出。
(1)快速获取DEM、DOM、地形图等测绘成果,用于道路选线和方案设计(图7)。
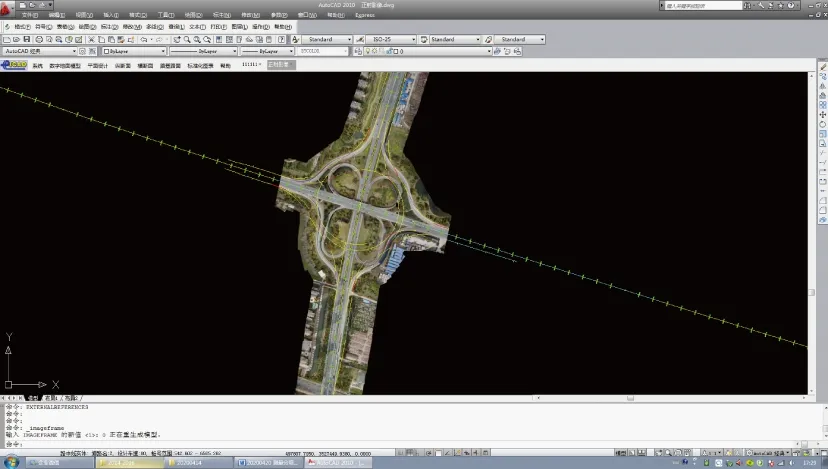
图7 基于DOM的路线方案设计
(2)提供高精度的纵横断面数据,用于纵横断面设计和更精确的土石方工程量计算。公路勘测设计中断面主要用来计算工程数量,断面的精度直接影响工程量计算的准确性[2]。传统勘测中,人工野外采集断面数据,效率低、劳动强度大、不安全,采集的间距决定了断面的精度。基于机载激光雷达的断面提取,因点云数据采集密度大,可获取更精确的断面数据。
(3)提取现状道路车道标线,用于改扩建工程的路线方案设计。
3.2 与BIM三维设计的结合
随着信息技术的发展,目前大多数工程勘察设计企业都在向信息化转型,BIM技术应运而生。相对于传统的二维设计,BIM技术实现在三维空间中进行三维设计,形成三维道路模型,而机载激光雷达可直接获取三维空间信息,生产的数字化成果可用于BIM三维设计、设计方案的比选和优化以及为BIM提供三维数字化模型。
3.2.1 提供三维地形模型,用于BIM三维方案设计
目前大多数的BIM正向设计软件创建道路设计方案模型均需要地形和影像作为参照和依据,基于机载激光雷达技术生产的DEM和DOM可分别提供地形数据和影像数据,且精度高、清晰度好,可作为BIM三维方案设计的输入(图8)。

图8 基于DEM和DOM的三维设计
3.2.2 三维真彩色点云提供三维场景,用于方案的比选和优化,辅助三维设计
经过预处理生成的真彩色点云,通过格式转换,加载到BIM设计软件中和三维道路模型集成展示,三维点云提供三维场景信息,可用于检查设计方案的合理性、对多个设计方案进行比选以达到优化设计方案的目的(图9)。
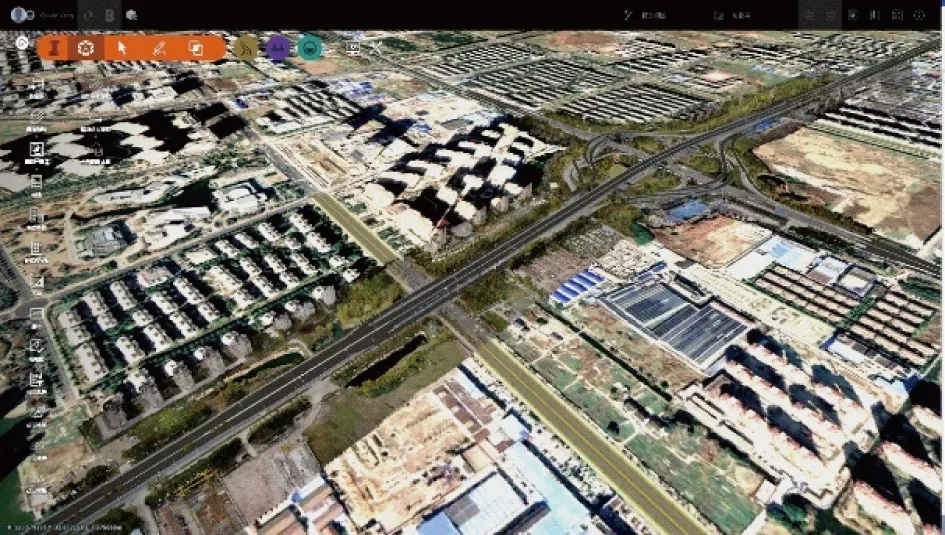
图9 激光点云辅助三维设计
3.2.3 基于激光点云的三维建模为BIM提供三维数字化模型
BIM本身带有三维模型可视化的含义,所以激光雷达与BIM的深入结合应用对基于激光点云的三维建模提出了需求。在传统的二维设计中,新建公路工程设计需要二维地形图成果,BIM三维设计则需要工程环境以三维模型作为表现形式,一方面符合三维可视化要求,另一方面作为工程环境信息的载体。改扩建工程传统二维设计需要现状道路的平面、纵横断面信息,将激光雷达技术引入则直接可创建现状道路的三维模型,作为BIM三维设计的基础数据(图10)。

图10 基于激光雷达的三维建模
4 结 语
机载激光雷达以其自身独特的优势,用于公路勘测设计精度好、效率高,在BIM三维设计中的应用可推动公路勘察设计企业的数字化、信息化发展,为实现数字公路和智慧交通奠定基础。然而目前激光雷达技术在公路交通领域的应用尚不成熟,如何使其发挥更大的价值还有待进一步的研究和探索:
(1)建立基于激光雷达的公路工程三维建模流程,提高三维建模自动化水平
基于机载激光雷达的三维建模国内已有一些研究,但大多在建筑和电力行业[1,3,4,7,11],且目前自动化水平和准确性有待提高,研究基于激光雷达技术的自动化点云分类、地物提取和三维建模是目前激光雷达技术发展的一个主要方向。
(2)挖掘激光雷达技术在公路工程不同阶段更多的应用价值
本文主要就机载激光雷达在公路工程勘测和设计阶段中的应用进行了研究和探讨。激光雷达技术作为监测的手段之一,在公路施工阶段,可监测项目区域地形和建筑物等地物的变化;公路建成,可基于激光雷达技术做竣工验收、复核施工过程与设计的一致性;在公路运营养护阶段,可监测路面沉降、道路设施变化等,以便进一步做出运营养护措施的决策。
机载激光雷达作为一项新技术,其在公路勘察设计工程中的应用还没有出台相关的技术规范和标准。随着该技术的发展,相信其在公路勘察设计工程中的应用有更广阔的发展前景[10]。