基于特征模型的失效航天器消旋控制
2021-11-30李超何英姿胡勇
李超,何英姿,胡勇,2
1.北京控制工程研究所,北京 100190
2.空间智能控制技术重点实验室,北京 100094
伴随着人类太空探索活动的日益增多,空间科学技术的研究越来越受到关注。由于硬件故障或燃料耗尽,每年都有大量航天器无法继续作业,严重影响其任务效益。失效航天器严重影响了人类的太空探索活动。一方面,由于丧失姿轨控能力,失效航天器会与其他航天器发生碰撞,产生大量空间碎片[1],这些碎片又会撞击其他航天器,产生越来越多空间碎片,甚至形成一个空间碎片带[2]。另一方面,废弃航天器占用了宝贵的轨道资源。Liou等估计每年至少要有5个大型废弃目标被移除[3],才能保证当前轨道资源的稳定。服务卫星通过执行一系列空间操作,捕获并移除失效航天器,可以释放轨道资源,减少空间碎片,降低航天器碰撞的风险。
太空中的航天器大多属于非合作目标。采用空间机械臂对非合作目标的在轨抓捕存在动作不配合、没有合作识别的抓捕点等问题[4]。此外,大多数目标已经失效,不具备姿态调整能力。由于长期失控,受太阳光压、重力梯度等摄动力矩及失效前自身残余角动量等因素的影响,这些失效卫星、火箭末级等目标往往会呈现出翻滚状态,给抓捕点的识别增加了难度,并极有可能发生目标与机械臂的碰撞。对翻滚非合作目标的消旋是指利用外部控制力矩衰减目标三轴角速度,最终实现目标姿态稳定的过程[5]。消旋有助于服务卫星快速跟踪目标抓捕点位置并方便与目标姿态同步化处理[6],给后续的抓捕操作提供了方便。
消旋方式主要有气体冲击、静电力、电磁力、离子束、激光等非接触式消旋以及减速刷消旋、机械脉冲消旋、空间绳系机器人消旋等接触式消旋[7]。针对质量较大的高速翻滚目标,用减速刷与目标接触消旋的方案实现简单,可以提供充足的阻尼力矩,且减速刷的柔性起到缓冲作用[8],降低碰撞的风险,是当前可行的工程应用方案。近些年,国内外学者围绕减速刷接触式消旋展开了大量研究。Liu等[9-10]用Hertz理论和运动几何关系建立了减速刷与目标的接触碰撞模型,该模型可以很好地模拟消旋时目标的平动和转动运动。段文杰等[11]针对服务卫星消旋时基座的位置控制和姿态控制问题,建立减速刷的线弹性接触动力学模型,基于该模型设计前馈与反馈结合的控制器,有效抑制了消旋时接触碰撞力对服务卫星位姿稳定控制带来的扰动。Duan等[12]针对接触碰撞模型的参数辨识问题,设计了一套由机械臂、减速刷、测力平台构成的地面物理实验系统,基于该系统测量了模型的物理参数。吴昊等[13]针对消旋时机械臂的稳定控制问题,采用滑模变结构方法设计空间机器人关节控制器,使得在接触力的扰动下机械臂末端仍能到达预定的消旋位置。Wang等[14]针对消旋中的接触控制问题,设计了一种最优接触控制方法,并给出章动收敛的条件,该控制方法可以有效抑制目标章动。
在接触式消旋问题中,最终的消旋效果与很多因素有关。减速刷的接触部位、接触方向、接触时间等物理量均会对消旋作用产生影响[15-16]。这些物理量一方面由目标的速度和位姿决定,另一方面由减速刷的位姿决定。上述因素导致了接触碰撞过程建模的模型不确定性,导致基于精确建模的消旋控制方法难以实现。
基于特征模型的黄金分割自适应控制是由吴宏鑫院士在20世纪80年代初提出的方法。所谓特征模型,即结合对象动力学特征、环境特征和控制性能要求而不是仅以对象精确动力学分析所建立的模型[17]。特征模型建立的形式比原对象的动力学方程简单,易于控制器设计,工程实现容易、方便。自被提出至今,研究学者围绕特征模型黄金分割控制方法开展了丰富的理论研究[18-19],同时该方法在神舟飞船再入返回控制、交会对接等重大实际工程中也得到了验证[20]。
目前的研究围绕接触碰撞建模、接触模型参数辨识、消旋服务卫星的位姿控制、接触控制等获得了大量成果。然而,由于接触碰撞过程的模型不确定性强,导致基于精确建模的消旋控制方法难以实现。而特征模型具有简化建模的特点,因此本文基于特征模型理论,研究接触式消旋控制问题,研究思路为:首先依据接触式消旋的物理机理得到系统动力学模型,然后根据动力学模型特性建立特征模型,接着基于特征模型设计黄金分割自适应控制器,最后通过消旋实验验证该控制器的可行性。
本文研究面向一类特定任务,该任务具备两个特点。一方面,任务中的目标已经长期在轨,达到了绕最大惯量轴自旋稳定的状态;另一方面,任务的实时性要求不高,服务卫星可以等待目标稳定后再执行下一次消旋动作。在对这类任务设计控制器时,主要考虑绕最大惯量轴方向消旋力矩的控制问题。
1 系统动力学建模
1.1 模型描述
典型的接触式消旋场景如图1所示。左侧为翻滚的空间目标,它含有一个中心为刚性的卫星本体和一对太阳帆板。Oxyz是目标的主惯量坐标系,各坐标轴都与通过目标质心O的主惯量轴一致。H是目标的角动量,α为垂直于目标角动量的平面。右侧为服务卫星,其质心为O1,它上面装配了空间操作机械臂,机械臂的末端执行机构是用于消旋的减速刷。
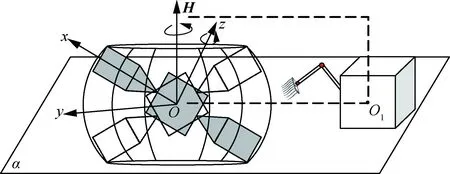
图1 消旋场景示意图
在推力器的作用下,服务卫星可以对目标绕飞跟踪。服务卫星使用传感器实时测量目标角速度,并通过机械臂操控减速刷与目标接触实现消旋。由于本文主要关注减速刷位姿对目标消旋的影响,为了突出主要问题,分析过程需要做出一些假设忽略:
1) 首先,由于机械臂具备一定的位姿调整能力,可以抑制接触力对减速刷固定端位置的扰动,忽略接触力对减速刷固定端位置的影响,认为接触碰撞时减速刷固定端位置近似保持不变。
2) 同时,由于服务卫星机械臂具备一定的响应速度,认为每一次接触前机械臂已经操纵减速刷达到指定位姿。
3) 此外,假设传感系统可以实现对目标运动状态的感知,消旋前可以获得目标的角速度、姿态角等信息。
4) 最后,由于服务卫星在进行一次消旋后,可以等待足够长时间后再进行下一次消旋,消旋系统的控制频率可以远低于目标帆板挠性的模态频率。因此,在目标动力学建模时忽略帆板挠性,主要采用刚体模型。
1.2 消旋系统的动力学模型
1.2.1 目标动力学模型
设目标绕Oxyz坐标轴的主惯量矩是Ix、Iy、Iz,各轴的角速度分量分别是ωx、ωy、ωz。在此本体坐标系中,惯量积等于零。当外力矩为零时,动力学方程为[21]
(1)
当三轴外力矩分别为Tx、Ty、Tz时,对应的动力学方程为
(2)
1.2.2 接触碰撞模型
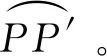
图2是目标与减速刷接触碰撞过程的典型情况示意图。图2(a)为初始接触时刻的立体图,左侧为失效卫星,目标绕MN轴自旋,O为失效卫星质心,图中画出了失效卫星的一侧太阳帆板,P为消旋标记点,位于帆板外楞中点;右侧为服务卫星操控的消旋减速刷GF,G为减速刷的固定端,GF此时与OG共线,并处于自然伸长状态。d=|FP|为刷子深入量。图2(b)为接触碰撞初始时刻的俯视图,此时GF与帆板平面平行,减速刷与帆板临界接触,减速刷没有发生形变,接触力为零。

图2 接触碰撞过程示意图
图2(c)和图2(d)为两个不同接触时刻的俯视图。由于目标转动,GF与帆板外楞接触并发生形变,GF′为减速刷初始状态所在直线,F′、P′分别为接触碰撞初始时刻F和P的位置,θ是帆板绕OG转过的转角。图2(c)和图2(d)表明随着消旋过程的进行,减速刷形变量逐渐增大。
由于帆板的刚度远大于柔性杆的刚度,因此在接触碰撞时帆板可以视为刚体,而减速刷可以视为发生线弹性形变的柔性杆。发生接触碰撞时的力学分析图如图3所示。减速刷GF对帆板的接触作用力包括压力fN和摩擦力fS,fN由减速刷的弹性形变产生,fS由帆板外楞相对减速刷滑动产生。uE为E到GF′的距离,θuE为弯曲杆在接触点E处横截面的转角。由线弹性材料均值杆弯曲应力公式,得压力fN的大小为[11]
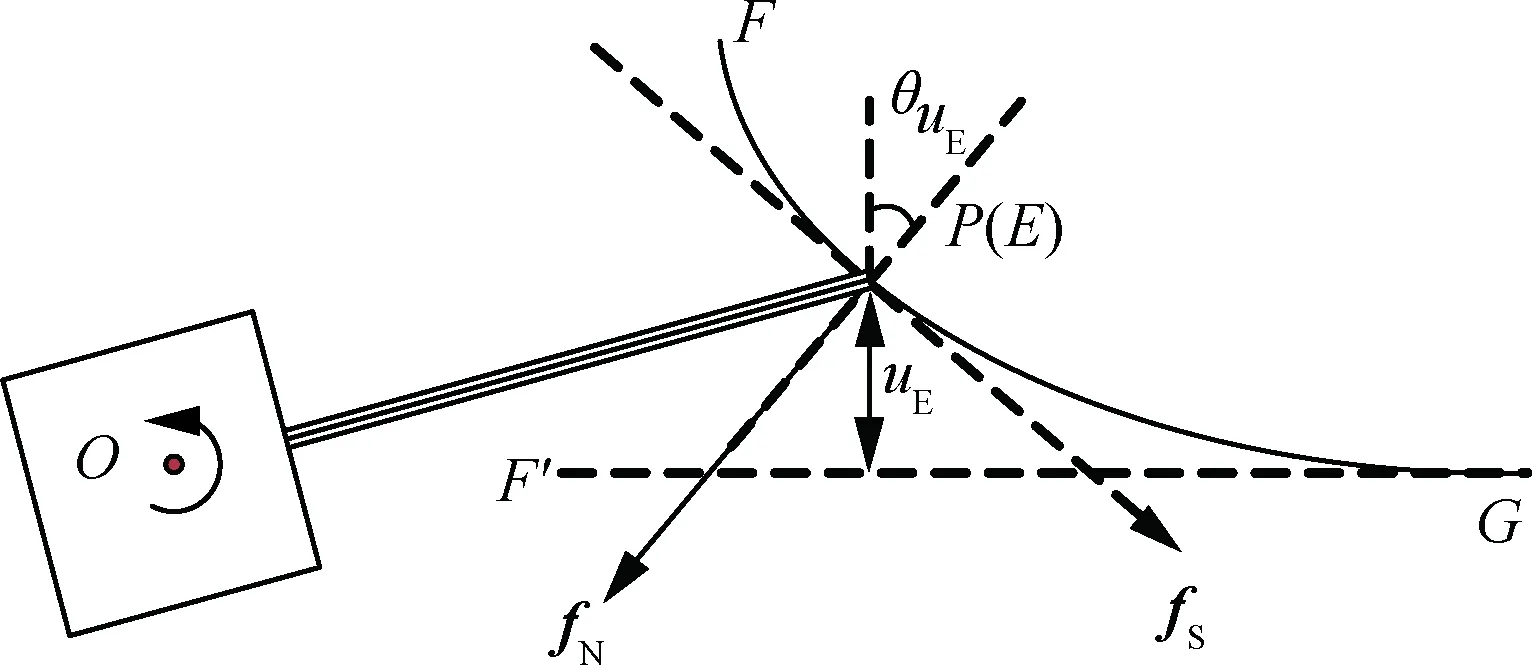
图3 接触碰撞力学分析图
(3)
式中:EI为材料的抗弯刚度;lGE为G到E的杆件长度。fN与曲线GF在E点的切线垂直。θuE的大小为
(4)
摩擦力fS建模为库伦摩擦模型,其大小为
fS=μSfN
(5)
式中:μS为滑动摩擦系数。fS与GF在E点的切线平行,与帆板相对减速刷运动的方向相反。
消旋时的接触力矩T的表达式可以写为
T=rOE×(fN+fS)
(6)
式中:rOE为从O指向E的位移,是接触力作用的力臂。
自旋轴和目标惯性主轴重合时的典型消旋场景时,消旋接触作用力与目标旋转轴垂直。针对自旋轴不和目标惯性主轴重合的情况,服务卫星首先通过自身的感知系统找到目标自旋轴的方位,然后施加与自旋轴垂直的接触力,使得消旋接触力矩能最大程度衰减目标角速度。
获得的消旋系统动力学模型将被用于建立接触式消旋的特征模型,通过分析动力学的特性可以确定特征模型中特征参数的取值范围,便于特征参数的辨识。
2 控制器设计
主要考虑最大惯量轴方向角速度的消旋控制。为了叙述方便,不妨设z轴为最大惯量轴,该轴的转动惯量Iz=J,角速度为ωz=ω。控制系统中将刷子的深入量d(图2(a))作为控制量u,将角速度ω作为被控量。
2.1 特征建模
对于仅绕最大惯量轴旋转的目标,当减速刷不与目标接触时的动力学方程为
(7)
当减速刷与目标接触时的动力学方程为
(8)
式中:τ为施加在最大惯量轴的接触力矩。
在已知控制量u、目标旋转角θ后,根据图3的几何关系及接触碰撞动力学方程(3)~方程(6),通过数值计算可以得到接触力矩τ。由于从u到τ之间存在复杂的非线性关系,很难得出显式的数学表达式,此处不妨将该数学关系记为
τ=f(u,θ)
(9)

(10)
式中:R为余项。u0、θ0分别为控制量和目标转角的平衡点,由具体消旋任务确定,一般取为零。将式(10)代入式(8)得到接触时的动力学表达式为

(11)
式中:

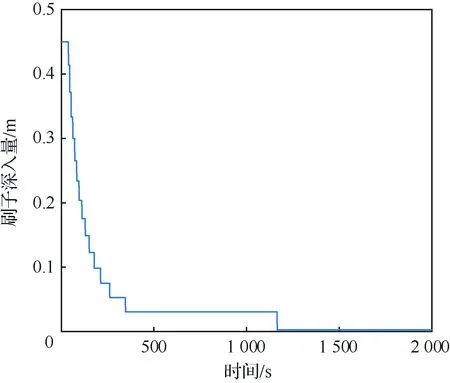
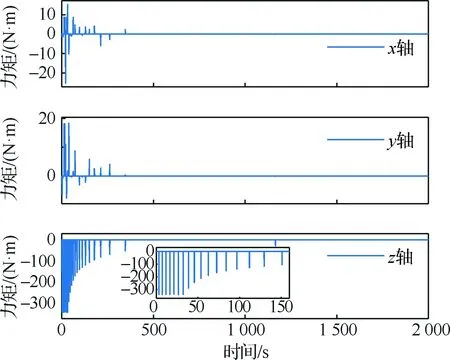
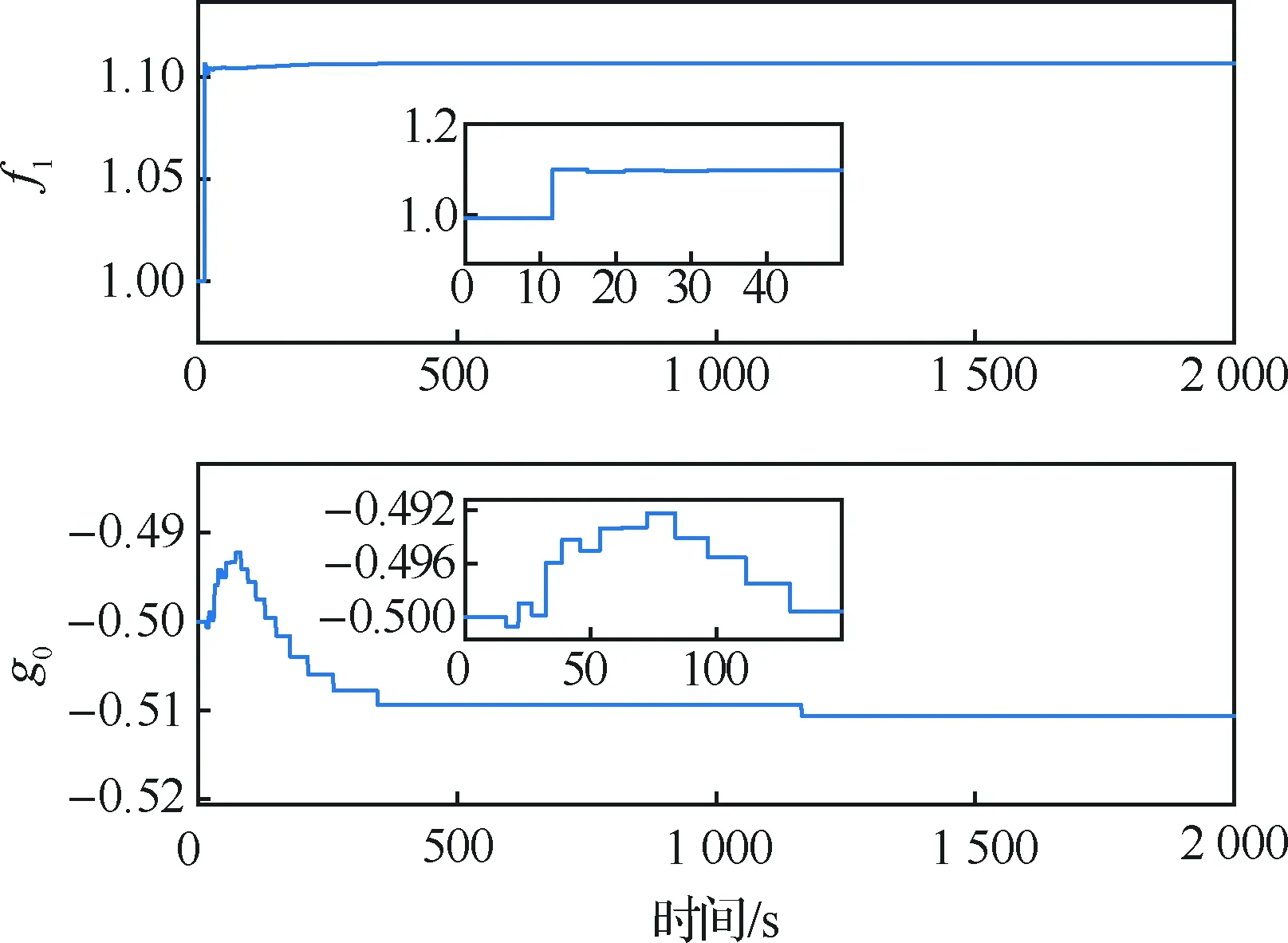
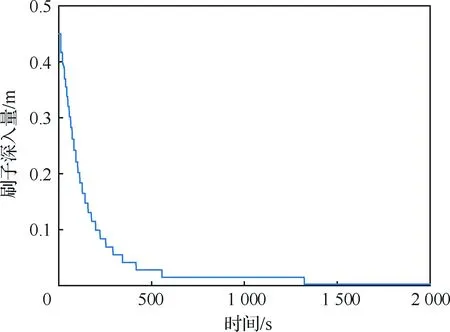
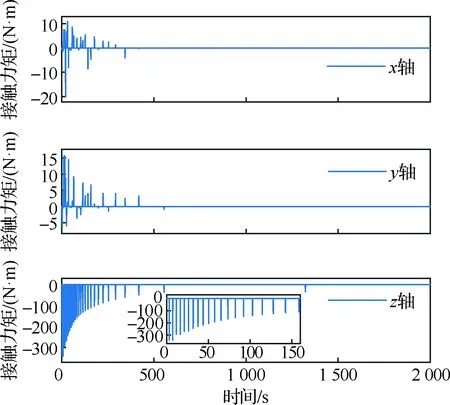
式中:0 (12) 将式(11)代入式(12),经过化简得到 ω(k+1)=ω(k)+Δtk+1bu(k)+Δtk+1δ (13) 式中: 定义压缩函数,将δ压缩到系数中[22],令 (14) 式中:N>0,是一个很小的常数。将式(14)代入式(13),得 所以接触式消旋系统的一阶特征模型表达式为 ω(k+1)=f1(k)ω(k)+g0(k)u(k) (15) 式中:f1(k)和g0(k)是特征参数,其表达式分别为 建模误差为 分析特征参数g0(k)和f1(k)的取值范围。根据g0(k)的表达式: 图4 接触力矩与目标转角方向相反 (16) (17) (18) 接着分析f1(k)的界,将其表达式改写为 (19) (20) L1、L2可以借助计算机数值仿真结合任务参数确定。 设计基于一阶特征模型的黄金分割自适应控制器。所谓黄金分割自适应控制方法,是把黄金分割比(l1/l2=0.382/0.618)引入控制器设计中而得名。它的主要特点是针对参数未知的复杂对象,当不允许现场反复调试时,黄金分割自适应控制能保证系统稳定运行[23]。解永春和吴宏鑫首次从理论上证明了在参数估计收敛后这种黄金分割控制器组成闭环系统的稳定性[24]。胡军[25]论证了针对输入输出相对阶为1的被控对象采用基于一阶特征模型黄金分割控制的可行性。 图5 基于特征模型的接触式消旋黄金分割控制系统框图 特征参数辨识器采用递推最小二乘算法: 式中: 特征参数的取值范围由式(18)和式(20)给出。 根据对象的特征模型表达式(15),设计一阶黄金分割自适应控制器为 式中:l1为正常数。由于g0(k)有变号特性,现针对该特性设计控制器。将u0(k)重写为 (21) (22) 由式(18)有 sign[g0(k)]=-sign[ω(k)] (23) 将式(23)代入式(22),得 (24) 根据式(24)得到最终的控制律为 (25) 式中:λ为防止控制量奇异引入的小的正常数。 为了验证黄金分割自适应控制方法的正确性,将该方法应用于柔性减速刷消旋数学仿真实验。实验设置一组对照组,采用自校正PD控制方法。为了适应非合作目标的抓捕,要将目标角速度衰减到足够小。因此,控制目标是将目标三轴角速度幅值衰减到小于1 (°)/s。 实验使用的减速刷参数如表1所示。仿真中将多柔性杆制成的减速刷简化为一根柔性杆。待消旋目标参数如表2所示。初始时刻目标处于稳定自旋状态,以90 (°)/s的角速度绕z轴旋转。每当目标绕z轴旋转一周,服务卫星对目标消旋一次。实验假设服务卫星可以在每次消旋之前获取目标角速度并预先将减速刷放置到接触位置。 表1 减速刷参数 表2 目标参数 为了充分衰减目标最大惯量轴角速度而不激发其他两轴的角速度,理想情况下消旋接触力应当垂直于目标最大惯量轴,但实际工程中总会存在执行误差。因此假设消旋力矩与最大惯量轴之间存在不超过5°的随机夹角。 特征模型消旋实验采用的自适应控制律为式(25),仿真实验结果如图6所示。每次减速刷与目标的接触碰撞都会使目标z轴转速“阶梯式”降低,当t=346.5 s时,角速度为0.438 (°)/s;当t=2 000 s时,z轴角速度为0.347 (°)/s。由于存在执行误差,接触力矩会激发目标x、y轴的角速度。在整个消旋过程中,x、y轴角速度幅值一直小于1 (°)/s,保持在可接受范围之内。最终时刻目标三轴末态角速度的幅值为0.460 1 (°)/s。此时消旋任务已完成,可以进行后续抓捕任务。 图6 特征模型消旋控制下的目标转速 图7 特征模型控制下的控制量 图8为接触力矩曲线。对比图7和图8可以发现,当刷子与目标接触时,接触力矩作用于目标上实现消旋;随着目标的旋转,刷子与目标分离,此时接触力矩保持为零。控制器在刷子与目标即将发生接触前根据当前目标角速度计算控制量,更新刷子深入量;当刷子与目标接触时以及与目标分离后,刷子深入量不发生改变。由于消旋力矩与最大惯量轴之间存在随机夹角,x、y轴存在随机的扰动力矩。扰动力矩激起了目标x、y轴的角速度。在整个消旋过程中,随着刷子深入量的不断减小,接触力矩的幅值不断减小。 图8 特征模型消旋控制下的接触力矩 被控对象的特征参数辨识结果如图9所示。根据式(18)、式(20)的参数范围,结合仿真参数,设定特征参数初值f1(0)=1,g0(0)=-0.5。在辨识过程中,1≤f1≤1.107, -0.5≤g0≤-0.492 3,当t>400 s时,特征参数收敛,f1→1.107,g0→-0.510 7。f1和g0相对各自的收敛值最多偏离了9.67%和3.6%。特征参数波动小,收敛速度快。 图9 被控对象特征参数辨识结果(特征模型) 自校正PD控制器的设计思路[26]是以PD控制为控制器基本形式,在线辨识被控对象模型参数,并将辨识结果按极点配置法进行控制器参数设计。实验中将接触式消旋对象建模为一阶惯性模型,其表达式为 y(k+1)+a1y(k)=b0u(k) (26) 式中:a1和b0为对象模型参数。 在该控制律下,目标角速度随时间变化的曲线如图10所示。当t=555.6 s时,z轴角速度降低到0.468 9 (°)/s,当t=2 000 s时,z轴角速度降低到0.403 8 (°)/s。在整个消旋过程中,x、y轴角速度幅值一直小于1 (°)/s,保持在可接受范围之内。最终时刻,目标的三轴末态角速度幅值为0.659 5(°)/s。此时消旋任务已完成,可以进行后续抓捕任务。 图10 自校正PD控制下的目标角速度 图11为自校正PD控制下控制量随时间变化的曲线图。图12为自校正PD控制下接触力矩随时间变化的曲线图。 图11 自校正PD控制下的控制量 图12 自校正PD控制下的接触力矩 图13为被控对象模型参数辨识结果。设定参数初值a1(0)=-1,b0(0)=-0.05。在辨识过程中,-3.428≤a1≤-1, -8.514≤b0≤-0.05,当t>500 s时,参数收敛,a1→-1.251,b0→-0.977。a1和b0相对各自的收敛值最多偏离了173.98%和771.44%。相比于图9的特征参数辨识过程,自校正PD控制中的参数辨识波动范围更大。 图13 被控对象特征模型参数辨识结果(自校正PD控制) 为了对比控制效果,给出自校正PD控制、黄金分割自适应控制下最大惯量轴角速度随时间变化的曲线,其结果如图14所示。两种控制方式下的性能指标如表3所示。 结合图14和表3可以看出,两种控制方式的三轴末态角速度均小于1 (°)/s,实现了控制目标,黄金分割自适应控制的末态角速度幅值更小,过渡过程时间和调整时间均优于自校正PD控制方案。 表3 对比指标 图14 不同控制方式下最大惯量轴角速度对比图 将仿真实验结论总结如下: 1) 基于特征模型的黄金分割自适应控制方法能有效衰减目标角速度。 2) 在参数辨识过程中,相比自校正PD控制,基于特征模型的黄金分割自适应控制方法的特征参数波动范围更小,辨识过程更加平稳。 3) 相比自校正PD控制,基于特征模型的黄金分割自适应控制方法的末态角速度减小了30.24%,调整时间缩短了37.74%,在快速性和稳态误差指标上综合性能更好。 针对接触过程动力学过程难以精确建模的问题,提出了一种基于特征模型的自适应控制方法。通过描述接触碰撞后目标角速度的特征模型,并基于该模型设计了黄金分割自适应控制器,有效克服了接触碰撞模型存在的不确定性。仿真结果表明与自校正PD控制方法相比,所提出的控制方法具有更好的动态和稳态性能。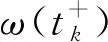
2.2 特征参数的范围分析




2.3 控制器设计

3 仿真分析

3.1 基于特征模型的黄金分割自适应控制实验


3.2 自校正PD控制实验


3.3 仿真结果对比分析


4 结 论
