大范围收敛的摄动Lambert问题新型解法:拟线性化-局部变分迭代法
2021-11-30冯浩阳岳晓奎汪雪川
冯浩阳,岳晓奎,汪雪川,*
1.西北工业大学 航天飞行动力学技术国家级重点实验室,西安 710072
2.西北工业大学 航天学院,西安 710072
Lambert问题是航天动力学领域的经典问题,很多学者对其进行研究并提出了不同的解决方法。在工程领域,由于摄动Lambert问题不具备解析解,因此主要通过数值方法进行求解。常用的摄动Lambert问题解法主要包括两类,一类是将其转换为初值问题进行迭代求解,另一类是通过离散化方法将其转换为非线性代数方程组进行求解。
将边值问题转换为初值问题的方法中,最具代表性的方法即打靶法。打靶法[1-2](Shooting Method)把两点边值问题转化为初值问题,并使用牛顿法(Newton’s Method)对初速度进行迭代修正,该方法虽然具有收敛速度快的优点,但其收敛域很小且对初值非常敏感,实际应用缺陷较大。多重打靶法[3]融合了有限差分法和打靶法,它将整个求解区间划分为多个子区间,并在各个子区间上求解初值问题,相对于简单打靶法,该方法具有更大的收敛域,但仍具有计算不稳定的缺陷,且在各个子区间的边界上存在速度不连续的问题。隐式打靶法[4]在间接法思想的基础上,借助尺度变换法和变分法,在求解包含隐式终端约束的轨道优化问题中得到应用。直接变换法[5-6]能够将两点边值问题转化为一对初值问题,计算简便,但该方法对微分方程的形式和边值条件有特定要求,对于一般的非线性两点边值问题并不适用。其他方法如Gooding给出了迭代变量的最优起始公式[7],得到了在所有情形下都可以迅速收敛的高精度Lambert问题算法,Battin通过迭代高斯方程[8]得到Lambert问题的解,但是这些经典方法都不适用于一般的摄动Lambert问题。
在边值问题的离散化方法中,有限差分法[9]的应用较早,通过差分估计将转移轨迹离散为大量的差分节点,进而对其进行代数求解。然而有限差分法需要建立大规模非线性代数矩阵方程,并且需要存储大量节点数据。对于大范围轨道转移的摄动Lambert问题,有限差分法不仅求解困难,其数值计算精度也较低。配点法[10]也是求解初值问题和两点边值问题的重要方法,该方法使用基函数对时间域内的配点插值,从而得到半解析解,且无需存储大量的离散数据[11]。NK/C伪谱法[12]使用Chebyshev正交多项式作为插值基函数,在求解Lambert问题、相对轨道转移等航天动力学问题中得到应用。径向基函数(RBFs)方法[13]则使用径向基函数对配点插值,在求解二体问题中得到应用。配点法具有精确高效的优点,但在计算过程中需要对雅克比矩阵求逆,这通常比较繁琐。修正Chebyshev-Picard迭代法(MCPI)[14]利用Picard迭代构造出修正公式,通过正交多项式插值逼近真实解,避免了矩阵求逆。反馈加速Picard迭代法[15]对修正变分迭代法[16]进行改进,并融合了配点法的思想,使用第一类Chebyshev正交多项式对配点插值,得到了一种可用于摄动轨道递推和摄动Lambert问题的新型算法。受算法特点所限,该方法的递推公式需要在整个时间区间上迭代,为了达到较高计算精度需要设置较多的配点和较多的基函数,使计算量增加。
本文提出一种基于拟线性化和局部变分迭代法的摄动Lambert问题求解方法,该方法能够一般性的应用于地球卫星轨道、相对运动轨道、深空轨道等不同轨道类型的转移问题中,为地球卫星的单圈或多圈轨道转移、航天器的交会对接、多航天器编队飞行、深空探测等任务提供稳定、精确、实时的轨道转移算法。在摄动Lambert问题中,使用拟线性化[17](Quasi Linearization)法将摄动Lambert问题转化为迭代形式的线性边值问题,通过叠加法将线性边值问题分解为两个初值问题,并得到初速度和转移轨道的迭代公式。与传统打靶法相比,其迭代格式更加简单,计算更加稳定,且收敛域显著增大。在初值问题的解算方面,本文利用了局部变分迭代法[18-19](Local Variational Iteration Method)精确高效的优点,在计算过程中不涉及非线性代数方程组的矩阵求逆操作,因此计算简便高效。在此基础上提出的拟线性化-局部变分迭代法(QL-LVIM),经过较少的几次迭代,计算结果即可达到很高精度。在初值选取方面,避免了常用的通过二体模型确定初始估计的步骤,可以通过更简洁的方式进行确定。该方法不仅具有与牛顿打靶法相当的快速收敛性,还克服了传统打靶法初值敏感、收敛域小的缺点,并且在同等计算精度下,能够显著提高计算效率。该方法的精确性、稳定性和实时性在低轨转移和高轨转移情形下得到了验证,结果表明,相对于对比方法,本方法在计算效率和收敛域方面具有明显优势。通过地-月系三体转移问题对方法的适用性进行进一步验证。此外,文献[17]中拟线性化方法仅用于求解一维两点边值问题,本文探究了该方法在多维两点边值问题求解中的应用。
1 问题描述
1.1 非线性边值问题的拟线性化
考虑两点边值问题,对于如下非线性二阶微分方程:
y″=f(t,y,y′)
(1)
满足如下边界条件:
y(t0)=y0,y(tf)=yf
(2)
式中:y′=dy/dt,y″=d2y/dt2。
式(1)可以改写为
φ(t,y,y′,y″)=y″-f(t,y,y′)=0
(3)
为得到迭代方程,令yn和yn+1分别表示第n次和第n+1次迭代结果,并且均满足φ=0,对第n次迭代,有
(4)
将第n+1次迭代结果展开有
φ(t,yn+1,y′n+1,y″n+1)=φ(t,yn,y′n,y″n)+
(5)
略去二阶及以上偏导数,式(5)可简化为
(y″n+1-y″n)+…=0
(6)
将式(4)代入式(6)可得
(7)
对应的边界条件为
yn+1(t0)=y0,yn+1(tf)=yf
(8)
则式(1)和式(2)构成的非线性两点边值问题被转化为式(7)和式(8)构成的迭代形式的线性两点边值问题,通过对其多次求解和迭代,即可不断逼近原非线性两点边值问题的解。在拟线性化处理中,虽然忽略了二阶及以上偏导数,但通过多次迭代,仍可以使计算结果达到较高精度。
1.2 摄动Lambert问题的拟线性化
航天器在绕地球运行中,会受到地球非球形摄动、大气阻力摄动、日月摄动、太阳光压摄动等干扰。在近地轨道,主要摄动因素为地球非球形摄动和大气阻力摄动,在中高轨道,主要摄动因素为地球非球形摄动[20-21],这里考虑地球非球形摄动和大气阻力摄动,忽略其他高阶小摄动力的影响。在赤道惯性坐标系下,航天器的轨道动力学方程为
(9)

(10)
记轨道转移时间为tf,边值条件为
r(t0)=r0
(11)
r(tf)=rf
(12)

(13)
rn+1(t0)=r0
(14)
rn+1(tf)=rf
(15)
1.3 通过叠加法求解拟线性化形式的Lambert问题
为求解式(13),使用叠加法[17]将rn+1写为
rn+1=V+W·s
(16)
式中:V和W为分运动的位置矢量;s为飞行器在转移轨道起点处的速度,即
(17)
在t0时刻,初值条件式(14)满足:
rn+1(t0)=V(t0)+W(t0)·s=r0
(18)
(19)
为应用叠加法,将约束(18)和(19)做如下分解:
式中:03×3为3阶零矩阵;03×1为3×1零向量,E3×3为3阶单位阵。则式(13)~式(15) 构成的两点边值问题被分解为如下两个初值问题。
1) 初值问题Ⅰ
(20)
(21)
2) 初值问题Ⅱ
(22)
(23)
利用边值条件(15)有
rn+1(tf)=V(tf)+W(tf)·s=rf
(24)
s=W(tf)-1·[rf-V(tf)]
(25)
不同于对初值敏感的牛顿法,拟线性化方法具有较大的收敛域,在确定边值问题的初始估计解时可以较为随意,这里以连接2个边界点的线段作为初始估计解。另外,由于03×3和E3×3均为3×3矩阵,直接求解初值问题Ⅱ比较繁琐,此时可以将其分解为x、y、z方向上的3个子问题,并分别求解,由3个子问题的求解结果合并得到W,注意图1中rn,n=0表示初始估计解而非转移轨道的初始位置。
图1 拟线性化法求解Lambert问题的流程
1.4 局部变分迭代法对初值问题的求解
经典的求解初值问题的方法有欧拉法、龙格库塔方法、线性多步法等,为得到较高精度的解,这些方法需要设置较小的步长,造成计算耗时较长,并且需要存储大量的节点数据。局部变分迭代法也是求解初值问题的方法之一,并具有精确高效的优点,计算中选取较大的步长就可以达到较高的计算精度,且无需存储大量节点数据,这里使用该方法对以上2个初值问题进行求解。对于如下一阶非线性微分方程:
(26)
x(t)=[x1(t),x2(t),…,xd(t),…,xD(t)]T为随时间变化的D维矢量。首先给出方程解的初始估计,记为x0(τ),随后在求解区间内对其进行多次修正,从而不断逼近方程的真实解,迭代公式为
τ]}dτ
(27)
式中:λ(τ)为待定的拉格朗日乘子矩阵。式(27)表明,近似解xn+1包括2部分,一部分为xn,另一部分为xn在t时刻之前累计偏差的加权平均。若使式(27)右端关于xn不变,则右端的变分为零,由此可以得到如下约束:
(28)
式中:t0≤τ≤t;I为单位阵;J(τ)=∂g(xn,τ)/∂xn。将λ(τ)在τ=t处做一阶泰勒展开,可以得到
λ(τ)≈-I+J(t)(τ-t)
(29)

(30)
通过在时间域配点可以将式(30)离散化,记t1,t2,…,tM为配点时刻,则由式(30)可得
(31)

(32)
式中:Φd=[φd,1(t),φd,2,…,φd,N(t)]为基函数系;Ad=[αd,1(t),αd,2(t),…,αd,N(t)]T为基函数的系数矢量。当x(t)的各分量用相同的正交基函数表示时,编程会大大简化,因此将Φd(t)统一写为Φ(t)。根据式(32)有
(33)

(34)
对于第n次迭代,
(35)
式中:G(t)=[G1(t),G2(t),…,Gd(t),…,GD(t)]T为D维矢量。通过正交基函数插值,将Gd表示为
(36)
式中:Φ(t)=[φ1(t),φ2(t),…,φN(t)],Bd=[βd,1(t),βd,2(t),…,βd,N(t)]T,对xd(t)和Gd(t)的插值使用相同的基函数Φ(t)。在t1,t2,…,tM时刻,由式(36)可得
(37)
(38)
类似地可以得到
(39)

(40)
可以得到迭代公式为
(41)

2 求解验证
2.1 计算精度和效率分析
本节使用QL-LVIM对摄动Lambert问题进行求解,并与另外4种求解两点边值问题的方法进行对比。打靶法是求解两点边值问题的经典方法之一,利用牛顿法可以得到初速度的迭代公式,并将两点边值问题转化为两个初值问题,若通过经典的四阶龙格库塔方法(RK4)对初值问题进行求解,就得到了牛顿-四阶龙格库塔方法(Newton-RK4),这里将其作为第1种对比方法。同时,将牛顿法与局部变分迭代法结合,构造Newton-LVIM作为第2种对比方法。牛顿法具有初值敏感性,当初始估计与实际初速度偏差不是很大时,才可以保证算法收敛。为了观察大范围收敛情况下不同方法的精度和效率,构造拟线性化-四阶龙格库塔方法(QL-RK4)作为第3种对比方法。最后,与文献[15]提出的反馈加速Picard迭代(FAPI)方法对比,该方法具有精度高、效率高的特点。本文使用联想笔记本R480(CPU: Intel Core i5-8250U;RAM:8.00 G)安装的MATLAB R2017a软件进行数值仿真,未采用GPU加速和并行计算。

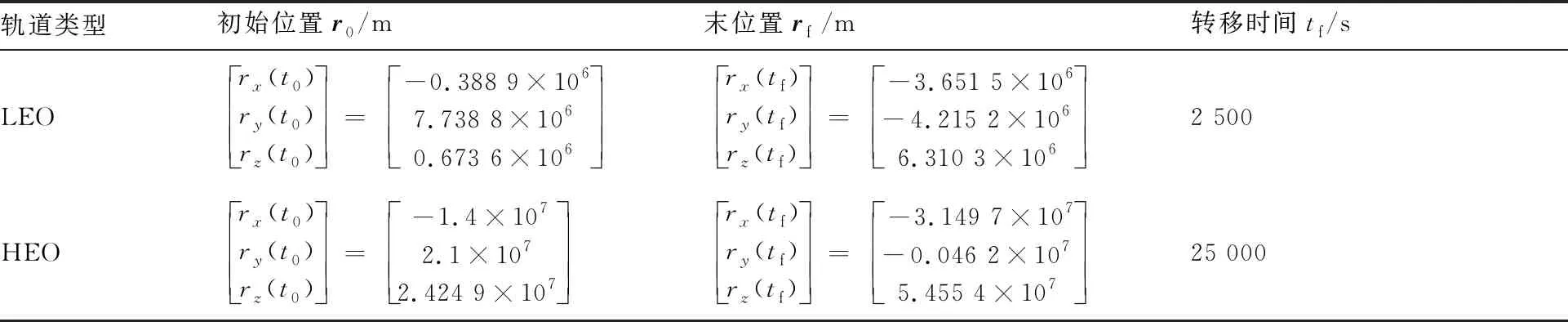
表1 摄动Lambert问题的边值条件和转移时间
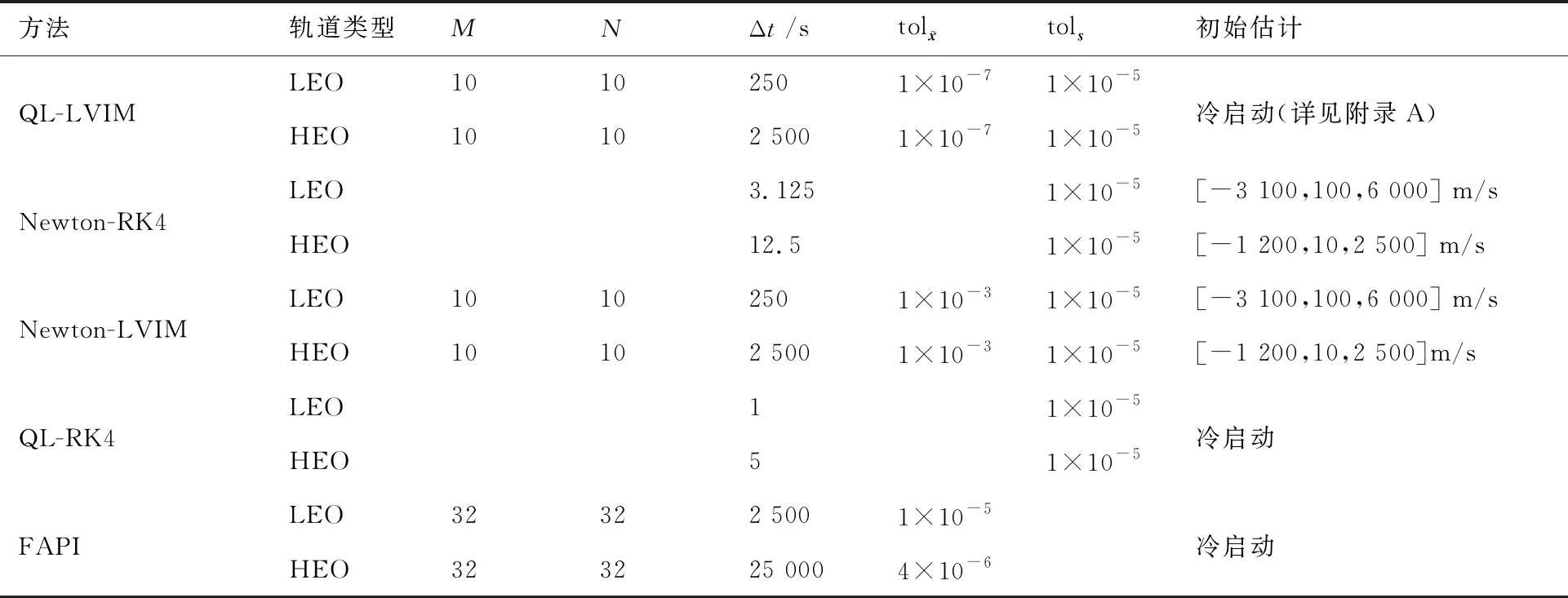
表2 计算参数
初始估计解可以通过多种方法确定,这里选取连接初始位置和末位置的匀速直线轨道,这种初始估计也被称作“冷启动”(详见附录A)。求解后得到低轨和高轨的转移轨道如图2所示,作为参照,调用MATLAB内置的ODE45函数(将相对误差和绝对误差分别设置为1×10-13和1×10-15),根据QL-LVIM求出的初速度做轨道递推,递推结果也在图2中给出,可以看到QL-LVIM的计算结果和ODE45函数的递推结果能够很好的拟合。
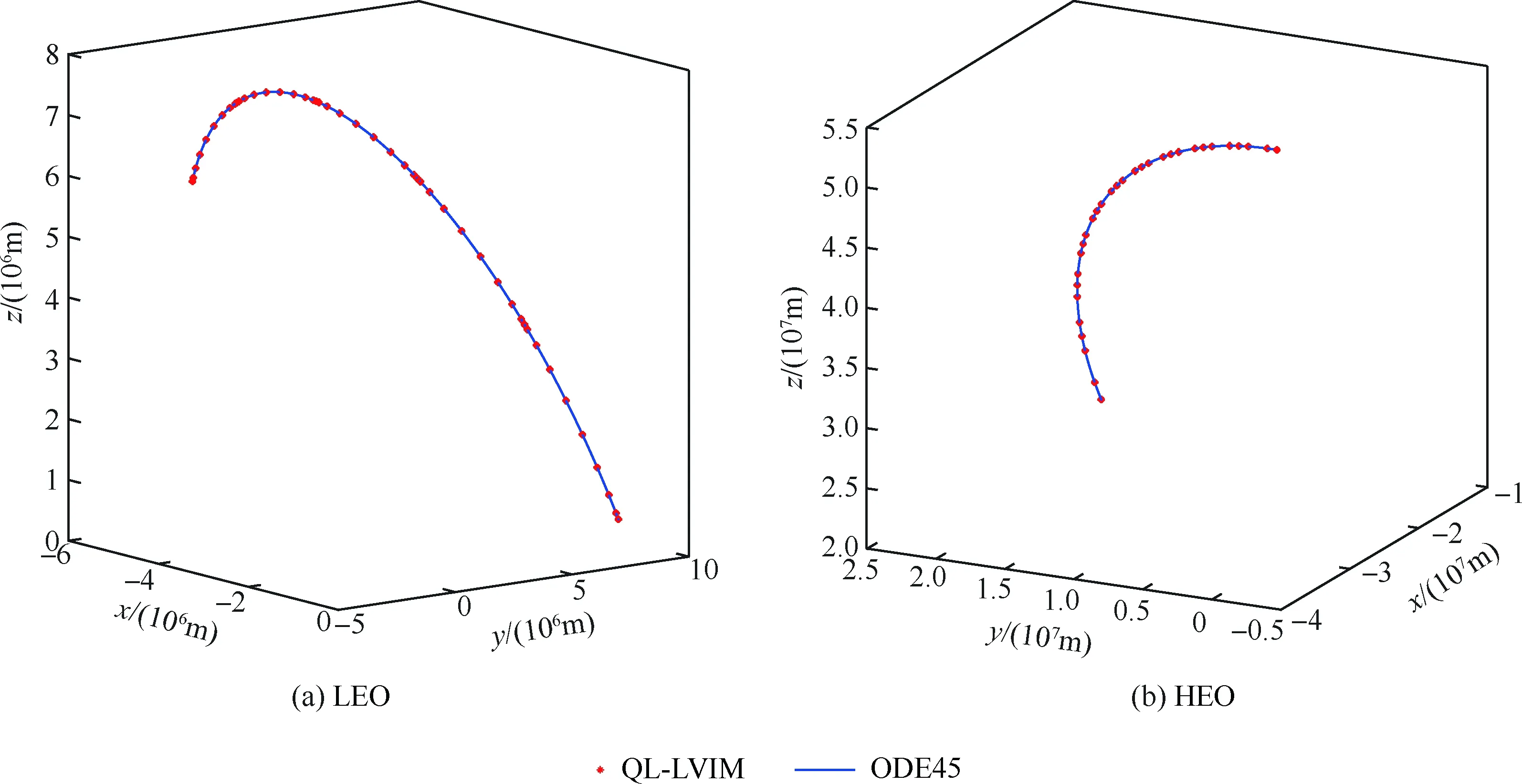
图2 拟线性化-局部变分迭代法的求解结果
为进一步分析QL-LVIM的计算精度和计算效率,将其与Newton-RK4、Newton-LVIM、QL-RK4、FAPI的计算误差和计算时间进行对比,相关参数和初始估计见表2。求解两点边值问题的关键在于求出准确的初速度,初速度的精度反映了算法的精度,因此采用如下方式定义误差:首先求出转移轨道的初速度,再根据起点位置和初速度使用ODE45函数(调至最高精度)做轨道递推,将递推出的终点位置与实际终点位置rf进行比较,则二者的偏差反映了初速度的精度和算法的精度,将该偏差定义为误差。5种方法求出的初速度如表3所示,计算误差和计算时间如表4所示,其中的计算时间为10次计算的平均值。
表3显示,不同算法求出的初速度非常接近,5种算法的有效性得到互相验证。在2种轨道类型下,QL-LVIM、Newton-RK4、Newton-LVIM、FAPI算法求解结果的小数点后6位、后8位完全一致,QL-RK4求解结果的小数点后2位与其他算法一致,表明QL-LVIM、Newton-RK4、Newton-LVIM、FAPI算法精度较高,QL-RK4精度较低。
表4显示,在表2的参数条件下,可以将QL-LVIM、Newton-RK4、Newton-LVIM、FAPI方法的计算误差都调整至1×10-6级别,这能够使不同算法的计算时间更具有可比性。在2种轨道类型下,QL-LVIM的计算时间均最短,其计算速度不同程度的快于其他算法,表明QL-LVIM具有更高的计算效率。而采用QL-RK4方法在经过150 s以上的运算后,精度也只能达到个位数级别,由于更长的计算时间很可能无法满足航天工程中的实时性需要,因此没有必要继续延长计算时间以提高精度。这一结论也与表3的结果吻合。
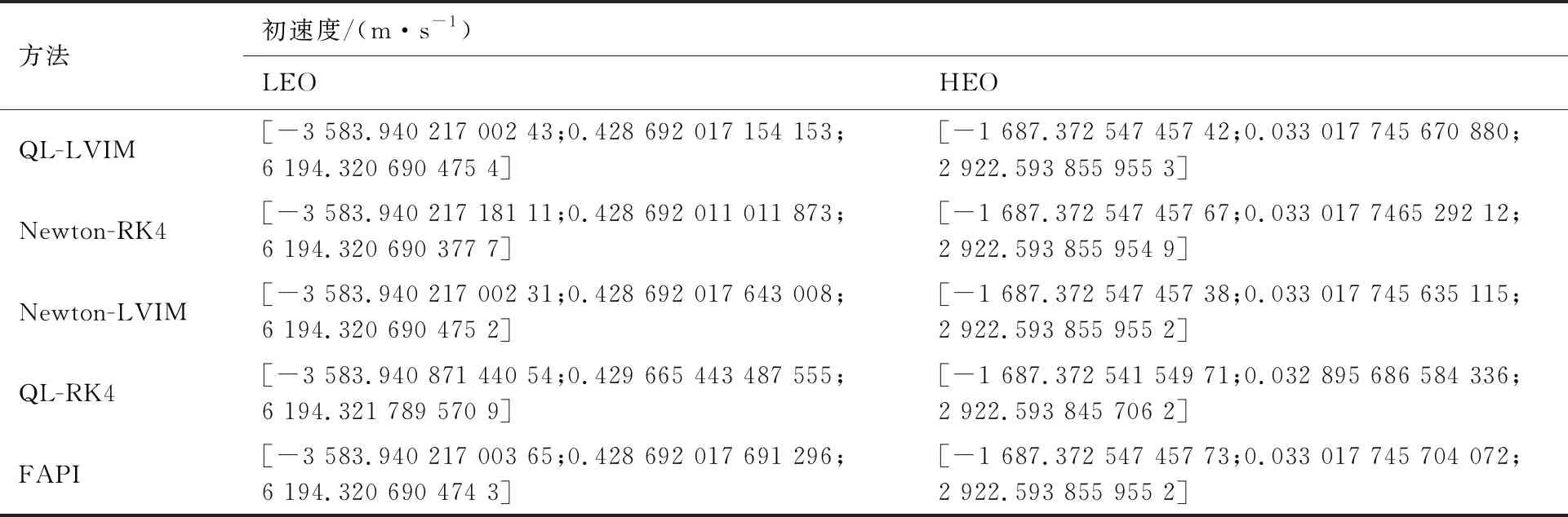
表3 5种方法计算出的初速度对比

表4 5种方法的计算误差与计算效率对比
QL-LVIM和FAPI都使用了变分迭代的思想,但前者计算速度更快,这是由于在应用FAPI方法时,必须在整个转移区间上迭代,由于时间跨度较大,迭代所需的配点个数和基函数个数较多,参数选择为M=N=32,使得计算量较大,且迭代次数较多。而本文方法克服了这一困难,在求解初值问题时可以将整个转移区间划分为众多子区间,在每个子区间分别迭代求解,在M=N=10时即可达到同样的计算精度。
QL-LVIM和QL-RK4都使用了拟线性化方法,但二者的计算精度和计算效率差异较大,这是由于RK4和LVIM具有不同的计算特点所致。具体来说,2种方法在对初速度进行迭代时,都用到了两个初值问题在终点时刻的计算结果,在RK4方法中,终点之前所有节点的误差都会累积至终点,这造成累积误差严重,计算精度较低,而在LVIM中,前一步长的误差不会累积到下一步长,即终点处的计算结果不受终点之前各节点计算误差的累积影响,因此精度较高。计算中RK4是利用小步长做单点递推,LVIM则是在大步长内对多个配点同时迭代,因此计算效率大大提高。这说明在应用拟线性化方法之后求解初值问题时,LVIM比RK4更有优势。
Newton-RK4与QL-RK4的计算效率和计算精度也差异较大,这是由于在Newton-RK4中,第1个初值问题的微分方程是原非线性微分方程,第2个初值问题的微分方程是原非线性微分方程关于初速度的偏导[17],非线性性质没有损失,因此计算精度较高。而QL-RK4方法中,2个初值问题求解的均为原非线性微分方程拟线性化后的微分方程,非线性性质的丢失造成计算精度的损失,为了提高初速度的精度,就要进一步缩小RK4方法的计算步长,这造成计算量和计算时间增加,但即便如此,计算结果也无法获得令人满意的精度。
虽然Newton-LVIM方法也有较好的计算精度和效率,但该方法仅在初速度估计值比较接近真实值的情况下才有效,这也是Newton打靶法的主要缺陷。相对于Newton法,QL方法的一大优势是具有大收敛域,为分析QL法和Newton法的收敛性,将Newton-LVIM与QL-LVIM进行对比,两种方法均采用LVIM对初值问题进行求解,以排除初值问题求解方法差异对收敛域的影响,对比结果在2.2节给出。
2.2 拟线性化方法与牛顿法的收敛性分析
在工程应用中,算法的收敛性是衡量算法性能优劣的重要标准之一,本节对QL-LVIM和Newton-LVIM的收敛域进行对比分析。由于2种方法的收敛域难以直接精确求出,这里采用蒙特卡罗模拟方法,为2种方法随机选取大量初值,考察在这些初值条件下两种方法的收敛情况。如前文所述,QL法通过对初始估计解(一段运行轨迹)不断迭代得到真实解,Newton法通过对初速度估计值不断迭代得到精确初速度。由于牛顿法不存在通用的初速度估计方法,这里假设,通过二体模型或历史数据大致知道真实初速度的数量级,在此基础上,在以原点为球心、真实初速度的模为半径的球面上随机选取Ns个点,以球心到这Ns个点的矢径做为Ns个初速度估计值,并分别使用Newton-LVIM迭代求解,以验证各个初速度估计值的收敛性。为增强可比性,利用这Ns个初速度和初始位置r0、运行时间tf构造Ns种“冷启动”(详见附录A),做为QL-LVIM的初始估计解,并分析收敛性,相关参数和模拟结果如表5和图3所示。
表5中,对于QL-LVIM方法,在LEO情形下,2 000个初始估计中有1 606个收敛,经计算这些收敛结果的方差为[5.7×10-21, 4.8×10-23, 6.7×-23],表明这些情形均收敛到了真实初速度且具有较高的精度,在HEO情形下,有1 933 个初始估计收敛到了真实初速度,这些结果的方差为[1.35×10-21, 3.36×10-25, 1.96×10-21],2种情形收敛初值的比例均达到80%以上。由于受大气阻力影响更大,LEO情形的初值收敛比例略低。在Newton-LVIM方法下,随机选取的初速度收敛的比例在20%左右,表明在上述随机采样方式下,QL法比Newton法具有更大的收敛域。其原因在于,不同于只对初速度进行迭代的Newton法,QL算法对整条估计轨道上的节点都进行迭代,这使得QL方法收敛域更大。图3 直观展示了2种方法下收敛初值的空间分布。

表5 拟线性化法与牛顿法的收敛性对比

图3 拟线性化法与牛顿法收敛初值分布对比
3 QL-LVIM在三体问题求解中的应用
为验证本文方法在其他轨道转移问题中的适用性,本节对地-月系的圆型限制性三体问题进行求解。
从地球到月球Halo轨道的转移通常借助Halo轨道的稳定流形[23],以地球到月球L1点Halo轨道的转移为例,通常包括2个阶段,第1阶段是航天器从地球停泊轨道到稳定流形的转移,第2阶段是航天器沿着稳定流形的运动,这一阶段不消耗或较少消耗能量。其中,地球轨道到稳定流形的转移轨道要通过大量计算才能确定,传统方法通常先借助蒙特卡罗模拟或经验方法确定一条估计轨道,再通过打靶法将其修正到精确结果。但由于边界条件和转移时间是任意的,这样的轨道搜寻过程较为耗时和不便,这里使用QL-LVIM方法对该问题进行求解。假设转移轨道的起点位于185 km高度的地球停泊轨道,其他初始条件和计算参数见表6。在地-月系统的旋转坐标系下,将地球、月球、航天器分别记为P1、P2、P3,则无量纲形式的航天器运动方程为

表6 地-月Halo轨道转移问题参数
(42)



图4 地-月系三体转移问题求解结果
4 结 论
设计了一种航天器轨道转移问题的新型解法——拟线性化-局部变分迭代法(QL-LVIM)。该方法兼具拟线性化的大收敛域优势和局部变分迭代法的快速收敛优势,能够对轨道转移问题进行快速、精确、稳定求解,较好地克服了牛顿打靶法收敛域小的缺陷和有限差分法计算效率低的缺陷。
1) 对LEO和HEO情形下的摄动Lambert问题的求解结果表明,QL-LVIM在计算效率方面具有明显优势。在同等计算精度下,该方法的计算耗时远低于几类对比方法。
2) 通过蒙特卡罗模拟对收敛域进行分析,结果表明本文方法的收敛域远大于牛顿法,该结论在三维图形中得到展示和验证。
3) 本文方法在计算效率和收敛域方面均具有优势,即使在计算能力较弱的星载计算机上也能快速计算出变轨结果,较少消耗星载计算机的计算资源。在未来工作中,将使用本方法解决相对运动、深空探测等更复杂空间任务中的边值问题,并对方法进行优化以进一步提高计算性能。
4) 除连续和可导,本文方法对于待求解的微分方程没有更多要求,因此对其他领域的多维两点边值问题也具有适用性。
