面向大型冶金轴件的激光清洗装备的研发*
2021-11-29崔可涛田晓波刘怀广杨金堂
崔可涛,田晓波,刘怀广,杨金堂
(1.武汉科技大学 a.冶金装备及其控制教育部重点实验室;b.机械传动与制造工程湖北省重点实验室,武汉 430081;2.鄂州职业大学机械工程学院,湖北 鄂州 436000)
0 引言
在重载、高速、重腐蚀、强介质、多场耦合等极端环境下服役的典型冶金机械设备,其关键轴体零件表面极易形成腐蚀、磨损、疲劳断裂等表面损伤层,长期以往会对典型冶金机械设备的正常运行产生严重影响,甚至诱发服役失效,也会对后续冶金生产的质量与再制造的效率产生不利干扰。
目前,国内清洗大型冶金轴件多采用传统物理方法,如高压水射流、喷砂清洗及人工打磨等[1],这些清洗方法不仅会造成资源的严重浪费,较长的清洗周期也会使清洗成本过高;同时由于单个轴件的体积尤为庞大,存在移动困难等问题,加大了清洗工作的操作难度,阻碍了清洗轴件的进程,为了满足基于再制造技术的重型高端装备循环利用的国家需求,提升国内现有再制造技术的水平,因此需要研发针对轴件特点的成套技术与装备,实现对复杂大型冶金轴件的绿色高效清洗。
如今随着对激光清洗机理的研究日益深入,激光清洗的效率与清洗后的表面质量得到了很大的提高与保障,是实现绿色高效清洗的有效途径[2-3]。文献[4]采用自主研制的脉冲式YAG激光清洗机完成了对轮胎模具的激光清洗;文献[5]使用手持式激光清洗机,实现了金属表面氧化层的高效清洗,但清洗工作依赖人工且局限于清洗中小型零件;文献[6]提出的电池极柱激光清洗装置,通过视觉系统的参与提高了清洗成品率与清洗效率,但设计成本过高。考虑到典型冶金关重件的清洗与修复面临成本高、技术难、工况复杂等难点,现有的再制造技术方法不能满足严苛环境下重型装备的服役需求,文献[7]公开了一种绿色高效的大型冶金轴件自动激光清洗的装置与方法,本文提出一种基于机器视觉[8]的废旧冶金关重件表面无损激光清洗与主动柔性控制的智能激光清洗方案,使用废旧冶金设备来研发可用于冶金关重件绿色表面处理与形性调控的智能[9]激光清洗装备,通过视觉检测系统的参与实现废旧冶金装备关重零部件的自动化表面损伤检测与定位,减少因使用清洗介质而产生的环境污染,响应“清洁、高效、低碳、循环”[10]的冶金工业再制造与循环经济的政策要求。
1 清洗装备构成
1.1 装备总成
所设计的废旧重型冶金装备表面无损激光清洗与主动柔性控制的智能激光清洗装备主要由视觉检测装置、激光清洗装置、驱动装置与配套的传动机构系统等组成,其装备总成如图1所示。
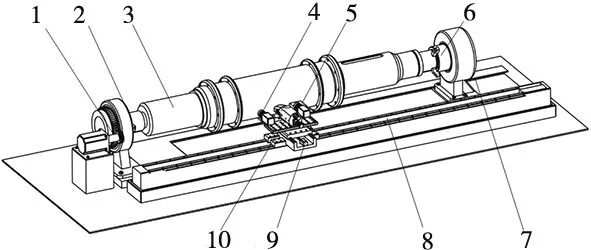
1.驱动装置 2.1#卡盘 3.大型冶金轴件 4.1#相机 5.2#相机 6.2#卡盘 7.滑轨 8.1#丝杆电机传动机构 9.2#丝杆电机传动机构 10.激光清洗头
在智能激光清洗装备的设计中,大多数装置是利用废旧传动零部件、废旧大型机床等废旧装备加工改造而成。以该激光清洗装备的驱动装置为例,整个装置是使用废旧冶金设备中的彭形齿式联轴器、电机、传动轴等部件改造装配而成,既可实现所需的驱动作用,也能满足清洗场合低速重载的工况要求;激光清洗装置装在废旧机床的原刀架位置,为清洗装备提供清洗机位;传动系统是利用原废旧机床的丝杆传动机构,可调控多自由度的运动进给。由于废旧大型冶金关重件的零部件多是用于轧制、卷取等严苛环境下,机械强度大,废旧设备经加工改造后不需要进行强度设计计算与力学仿真即可满足使用要求;另一方面,使用废旧零部件能大幅度降低设备的研发成本,增强设备的互换性,降低后期维修与维护成本,对实现固废资源化理念有重要意义。
1.2 驱动装置传动构成
清洗装备的驱动装置是通过废旧设备循环再利用来实现的,主要由废旧电机、废旧彭形齿式联轴器与废旧轴承等组成,思路是通过废旧电机与废旧彭形齿式联轴器的外齿轴套之间的配合应用从而改造成一个简易的单级减速机,而在驱动装置最前端的卡盘则负责执行相应的张合与夹紧动作,具体的驱动装置如图2所示。

1.电机 2.联轴器外齿轴套 3.轴承 4.卡盘
电机1将扭矩通过电机前端转轴传递给彭形齿式联轴器的外齿轴套2,从而带动外齿轴套的转动,联轴器内部与卡盘相连接,卡盘可起到固定轴端并执行周转运动的功能,以上三者通过轴承3安装在支座上。
其中,废旧彭形齿式联轴器的结构如图3所示,彭齿式联轴器从结构上来看是对称的,联轴器最外端是两个外齿轴套,可通过键联接的方式压装到其他装置的轴头上,起到联接两装置的作用。而且比起其他类型的联轴器,彭形齿式联轴器的载荷能力与传动效率要更高,在耐久、扭矩传递、吸收联接误差等方面有着十分优越的性能,其良好的刚性与挠性可适用于对减震与缓冲要求不严格的机械设备中,在本装置中所使用的就是废旧彭形齿式联轴器的一个外齿轴套。

图3 彭形齿式联轴器
1.3 视觉检测与清洗装置构成
高端冶金装备关重零部件的表面损伤检测与定位的智能化实现离不开视觉检测装置的参与,其中,视觉装置所涉及到的检测动作主要分为两步,第一步是清洗前的轴件表面污染类型的自动判定检测与表面深度信息的获取,实现基于3D在线反求的选区清洗精确定位[11]和智能化柔性清洗控制;第二步是进行清洗后的轴体表面质量的实时监测,建立再制造重型装备质量评价体系。而激光清洗装置负责完成相应的清洗动作,视觉检测与清洗装置如图4所示。
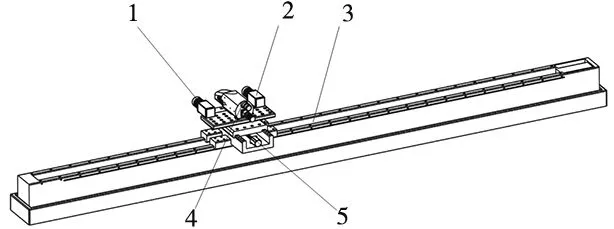
1.1#相机 2.2#相机 3.1#丝杆电机传动机构 4.激光清洗头 5.2#丝杆电机传动机构
清洗装备的清洗平台是循环利用原废旧机床的刀架平台,平台工作区由两台深度相机、激光清洗头、丝杆电机传动机构、直线滑轨、滑块等组成。传动装置由与待清洗轴体轴线方向一致的1#丝杆传动机构和垂直于待清洗轴体轴线方向的2#丝杆传动机构组成,分别负责控制轴向与径向两个方向上的运动进给,调控清洗距离,使清洗装备能自适应于待清洗轴体不同阶梯轴段的尺寸,达到最佳清洗效果。其中滚珠丝杆作为主动体,利用丝杆和螺母组成的螺旋副实现传动,工作原理是将螺母随着丝杆旋转时转过的角度按照相应规格转化为直线运动,带动滑块组件上的1#相机、2#相机和清洗头在工作区内进行往复直线运动,完成实时检测与修复。丝杆电机传动机构具有许多优良的性能,相比其他传动机构而言要更加省电,扭矩与推力的高效转化使其传动效率高达98%,传动灵敏且平稳,定位精度高与同步性能好[12]。
2 清洗作业流程
基于本文所设计的自动激光清洗装备,其激光清洗时的具体作业流程与步骤如图5所示。

图5 清洗流程图
进行激光清洗前,首先将待清洗的大型冶金轴件吊装至清洗装备上方,清洗装备的右侧支座是可移动式,可由底部滑轨控制,当轴体下降到清洗作业区间时,天车控制轴体向左侧靠拢,由左侧驱动装置上的卡盘进行夹紧,同时清洗装备底部的滑轨带动右侧支座向左侧移动,直至右侧支座的卡盘夹紧轴体右轴端,接下来启动视觉检测装置与清洗装置,前相机执行检测动作,通过计算机来规划清洗平台在工作区域内的行进路径,后相机执行监测动作,清洗机沿轴线方向从前到后进行一定激光幅值宽度内的清洗,如图6a所示;当清洗平台行进到轴体末端时,轴体以顺时针方向转动所设定的角度,使工作区内呈现下一条状待清洗区域,此时清洗平台反向退回,以次循环往复清洗,如图6b所示。

(a) 夹紧轴体,清洗平台右侧进给清洗
视觉检测是实现自动化清洗的核心,获取表面污染信息与深度信息也是进行清洗作业的重要前提条件。激光清洗装备的清洗对象是废旧大型冶金轴件,其表面分布着孔、键、槽等复杂特征以及轴向与径向尺寸变化较大,在清洗之前,需要准确知道它们的尺寸、表面特征与所处位置信息等,尤其要感知复杂曲面上的污染层信息,这就要在其清洗的过程中进行实时监测,给出最佳清洗路径和清洗工艺参数,直至完全清洗。具体实现是前相机获取轴体的表面图像与深度图像,经图像处理操作之后,使计算机指导丝杆传动机构的运动来保证清洗工作的正常进行,后相机则对清洗后的区域进行在线检测,旨在用来判定是否存有某些区域未彻底清洗,若存在,控制清洗装置移至该区域进行二次清洗,实现自动化清洗工艺。
3 控制系统设计
激光清洗装备中所涉及到的控制动作主要包括主轴的夹紧与旋转动作、激光清洗与视觉检测装置的功能性动作和丝杆传动机构的进给动作。本文通过采用S7-200PLC和S7-300PLC系列相结合的方式进行控制系统的设计[13],其系统框图如图7所示。其中,S7-200PLC负责激光清洗装置的各项运动,其余运动机构均由S7-300系列来控制完成,S7-300PLC与S7-200PLC之间的通讯通过Profibus-DP系统来完成。
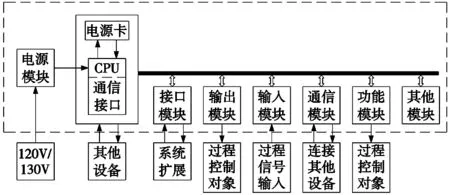
图7 控制系统框图
清洗装备的控制系统通过总站PLC来实现各项专机动作的控制,通过继电器与相关传感器的使用能够实时读取各工位的作业数据信息,并显示于触摸屏上,也可将指令传递给相关作业单元,完成智能化清洗,图8所示为所设计的清洗装备系统操作界面。

图8 激光清洗装备系统控制界面
4 清洗实验
为了建立以质量、效益为目标的废旧重型装备再制造的质量评价体系与工程示范,推动废旧重型装备的再制造循环利用,基于本文所设计的废旧重型冶金轴件绿色表面清洁与形性调控的智能再制造激光清洗装备,作者课题组联合开发并研制出了千瓦级高功率激光清洗机,于浙江金洲某公司投入生产并成功应用于泰尔重工股份有限公司,图9所示为本次清洗实验所选用的JZ系列激光清洗机,该系列清洗机支持手动清洗与自动清洗双作业模式,清洗激光器可夹持在设计的清洗工位上,所研制的JZ系列激光清洗机的相关参数如表1所示。

图9 JZ-200W激光清洗机
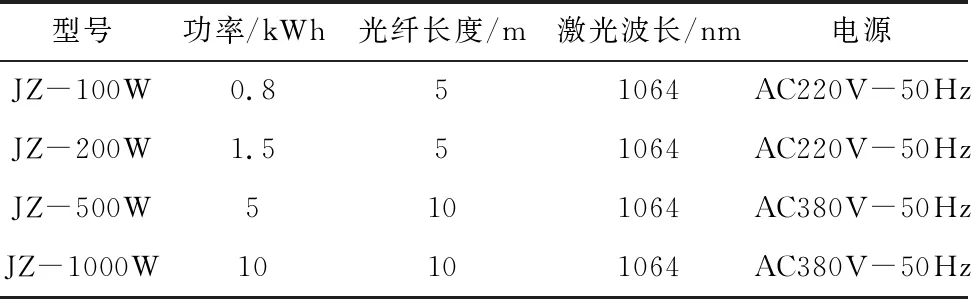
表1 JZ系列激光清洗机参数
表1中JZ系列清洗机对工作距离要求是150 mm~300 mm,图10所示为通过使用本项目组研发的JZ系列激光清洗机对大型冶金轴件的不同轴段部位加以激光除锈工艺、除漆工艺与除油工艺实验,图10中上方图像为未经表面清洗的轴体图像,下方图像进行表面清洗后的轴体图像。

(a) 大轴 端面 (b) 焊接 法兰 (c) 大轴 虎口 (d) 大轴 R角 (e) 大轴 托架
对图10所示的清洗图进行对比分析:搭载着JZ系列激光清洗机的清洗装备在一定程度上实现了废旧大型冶金轴件的表面无损清洁,在对图10a与图10b中氧化腐蚀程度轻微的工件如大轴端面与焊接法兰[14]进行激光清洗除锈[15],清洗后的基底材料光洁度可达3.2以上,清洗效果满足磁粉探伤的基本要求;在图10c与图10d中对轴表面含轻微油液与轻度腐蚀的工件如大轴虎口与R角进行激光清洗除漆,清洗效果满足探伤基本要求;在图10e中,对含有轻度油液的大轴托架工件进行清洗,其清洗效果基本满足磁粉探伤要求。后续将在保证不损伤表面基材的前提下,以更高效的“除锈、除漆、除油”效果为研究方向,来保障后续盾构机、海洋钻采装备、冶金装备等重型装备的再制造与安全服役,推动再制造技术的跨代式发展,实现废旧重型装备损伤检测与再制造形性调控。
5 结束语
本文提出了基于机器视觉的大型冶金轴件激光清洗装备的研发方案,完成了智能激光清洗装备各项结构功能单位的研发与相关控制系统的设计。装备由废旧冶金机床及零部件加工改造而成,降低了研发设计成本的同时也推动了我国废旧重型装备的绿色再制造的发展,机器视觉检测系统的参与实现了表面清洗时的检测、判定与传动三者之间的智能化柔性清洗控制,降低了清洗作业的复杂程度,对实现再制造循环利用有着重要的意义,具有实际应用价值与发展前景,为今后的研究奠定了基础。
