基于“1+X”的工业机器人搬运教学案例设计*
2021-11-29罗明凤蒋亚风
许 伟 , 罗明凤 , 蒋亚风
(四川工商职业技术学院,四川 成都 611830)
0 引言
为深入贯彻《国家职业教育改革实施方案》中关于在职业院校、应用型本科高校实施“1+X”制度试点工作要求[1],提高工业机器人技术专业人才培养质量,向企业输送优秀工业机器人技术技能人才,助力“中国智造”,四川工商职业技术学院于2019年积极申报并获批成为“工业机器人应用编程”证书试点院校,密切联合企业,共同研究与制定将证书培训内容深度融入工业机器人技术专业现有课程体系的建设方案。
目前,搬运作业已发展成为了工业机器人应用最大的领域,广泛地应用在汽车、食品、电子电气、铸造等行业,涉及的环节包括制造、加工、装配、包装、物流输送、码垛、仓储等。采用工业机器人进行搬运工作,解放了人类双手,改善了人们的工作环境;降低了运营成本,极大地提高了生产效率;安全可靠,降低了搬运过程中的产品损坏率;实现了柔性生产,保证了生产效益的最大化。
“1+X”证书“工业机器人应用编程”职业技能等级标准的初、中、高三级标准都对工业机器人搬运应用做了具体职业技能要求。其中,中级技能等级标准要求:能够根据工作任务要求,编制工业机器人多工艺流程的搬运应用程序并能够对程序进行调整和优化;能够根据工作任务要求,实现搬运应用的虚拟仿真和离线编程与应用调试。
1 教学案例分析
教学案例以校内轻工智能线为综合教学设备,轻工智能线的整体布局如图1所示。
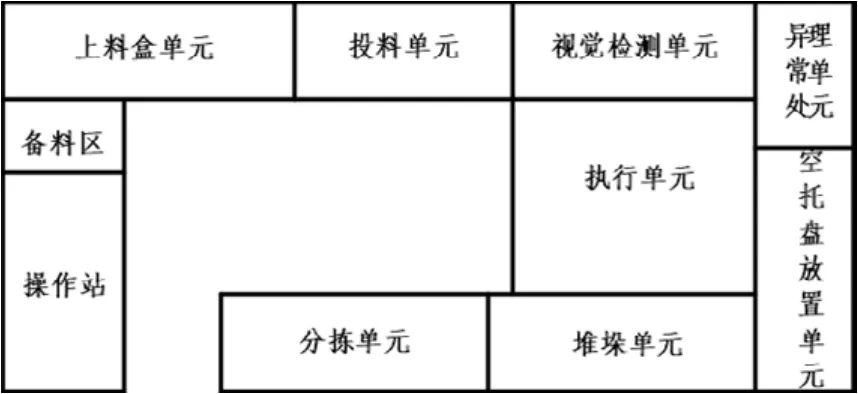
图1 轻工智能线的整体布局图
1.1 轻工智能线简介
轻工智能线主要用于物料的检测、分类等。例如,可实现不同颜色的豆子、瓜子的检测、分类,以及相关数量的统计。产线具备智能化的生产制造SCADA系统,具备物料跟踪识别功能,能够实现对现场设备的实时数据采集和对设备的远程控制。轻工智能线主要由操作站、备料区、上料盒单元、投料单元、视觉检测单元、执行单元、空托盘放置单元、堆垛单元、分拣单元等组成,总体结构效果如图2所示。
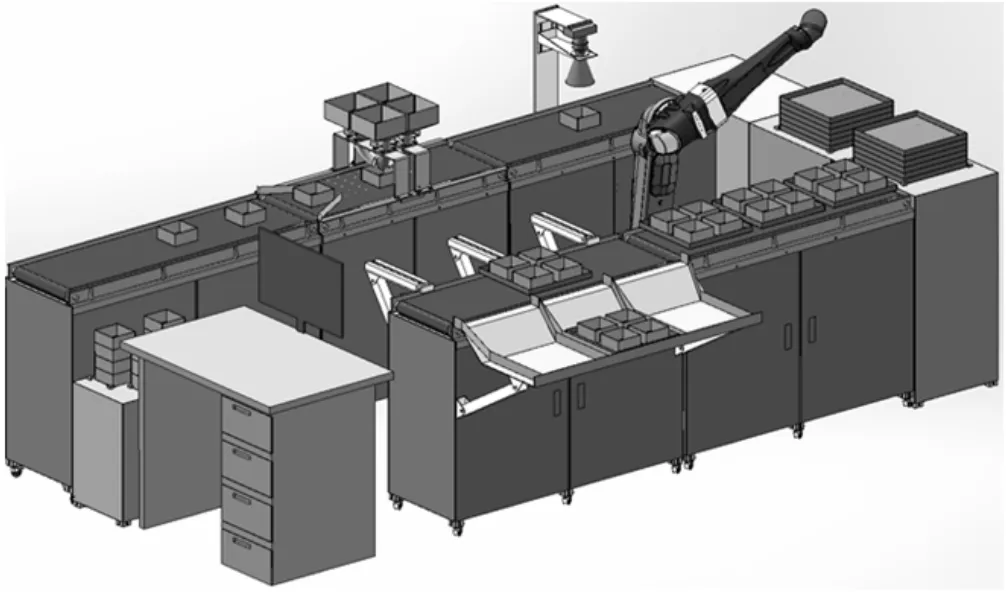
图2 总体结构效果
1.2 搬运案例分析
轻工智能线是综合教学设备,涵盖了机器人编程与仿真技术、PLC与触摸屏应用技术、伺服驱动技术、机器视觉技术、气动技术、MES应用技术等应用技术。搬运案例主要用于工业机器人技术专业大二第一学期工业机器人现场编程与调试课程教学,而PLC与触摸屏应用技术、伺服驱动技术等课程还未学习。因此,搬运案例主要以机器人现场编程与调试为教学中心任务,主要涉及产线中的执行单元、视觉检测单元、异常处理单元、空托盘放置单元、堆垛单元、分拣单元。
执行单元采用ABB IRB1200型工业机器人,负载7 kg,工作范围900 mm,能够胜任搬运料盒和托盘的工作。为提高机器人编程效率,减少示教点,综合成本等,在机器人夹爪上安装了漫反射型光电开关,其检测距离为5 cm。
用于分拣的物料选用豆子,球形,重5 g,有红、黄、绿、蓝4种颜色。盛放豆子的料盒有大小料盒两种规格,小料盒的长宽高为100 mm×100 mm×50 mm,大料盒的长宽高为200 mm×100 mm×50 mm;盛放料盒的托盘为长方体,中间安放了便于机器人抓取的固定件,长宽高为260 mm×260 mm×20 mm,分别可以盛放4个小料盒,2个大料盒。
订单产生后,上料盒单元工作,输送料盒;进入投料单元,投放订单所要求颜色及重量的豆子;进入视觉检测单元,检测是否是订单要求的物料,主要检测豆子颜色,如果豆子颜色错误或有其他颜色的豆子,机器人将盛放豆子的料盒搬运至异常处理单元,后回到工作原点等待;如果视觉检测结果符合订单颜色要求,机器人搬运料盒放入托盘;待托盘已满或符合订单要求的重量时,机器人搬运堆垛单元,堆垛单元继续将托盘运送至分拣单元,根据系统设置,分拣出库。
2 搬运案例知识、技能、素质目标
搬运案例对标工业机器人专业的国家专业教学标准[2],结合工业机器人系统操作员国家职业标准中的中级工、高级工对工业机器人系统操作与编程调试方面的要求,依据“1+X”证书“工业机器人应用编程”中级职业技能等级标准中对机器人搬运作业的系统参数设置、系统编程、系统离线编程与测试等技能方面的要求,贯彻执行国家要求将思政教育贯彻教学全过程的有关政策[3-4],优化出课政融通的知识、技能、素质目标,具体如下。
1)知识目标:①描述轻工智能线系统整体框架及工作流程;②概述机器人规范操作章程和实验室“7S”管理标准;③归纳工具、工件坐标系设置与修改方法;④阐明I/O信号配置过程;⑤分类、选用工业机器人编程指令;⑥总结机器人程序的示教编程与调试步骤;⑦运用编程指令进行搬运作业程序的编写与调试;⑧学会利用机器人仿真软件进行离线编程与动画仿真。
2)技能目标:①能看懂工业机器人技术手册等资料;②能完成机器人夹爪、传感器的安装及接线任务;③能根据工艺要求,熟练操作机器人进行工具、工件坐标设置以及I/O信号配置等系统设置;④能根据工艺流程,灵活运用机器人指令,熟练操作机器人进行搬运任务示教编程与调试;⑤能进一步完善优化程序;⑥能运用机器人仿真软件完成动画仿真、离线编程和在线编程。
3)素质目标(含思政):①激发民族自豪感,增强职业认同,将个人成长与国家发展相统一,勇担中华民族伟大复兴的重担;②逐步养成吃苦耐劳、专心致志、求真务实、精益求精的工匠精神;③激发潜能,能运用相关的专业知识、方法和技能解决工作和学习中的实际问题;④树立忠于职守、爱岗敬业、团队协作、开拓创新的职业道德;⑤树立标准意识、绿色意识、责任意识,养成文明生产、规范操作的职业素养。
3 教学设计
基于成果导向(OBE)教育理念设计以学生为中心的教学任务[5],实施“理虚实”一体化教学,实现对教学案例的知识、技能、素质目标的达成。将搬运案例分解为轻工智能线认知、机器人夹爪系统的安装与调试、机器人搬运程序编写与调试3个任务,共16学时。
3.1 轻工智能线认知
任务1轻工智能线认知,设置2学时,从硬件和软件两个方向认识轻工智能线,掌握系统框架,熟悉工艺流程,拓展对智能线的认知,增强民族自信,加强学生的职业认同,为后续安装与调试、示教编程以及思政教育奠定基础。
3.2 机器人夹爪系统的安装与调试
任务2机器人夹爪系统的安装与调试,设置4学时,设计夹具工作原理、结构、选用、安装调试以及光电传感器工作原理与安装调试两个子任务,拓展智能抓取搬运设计能力,强化理论指导实践,知行合一,注重团队协作、规范操作等职业素养的培养。
3.3 机器人搬运程序编写与调试
任务3机器人搬运程序编写与调试,设置10学时,分解为工艺路线构建与优化(2学时)、机器人参数设置与信号配置(2学时)、料盒搬运程序编写与调试(2学时)、托盘智能抓取程序编写与调试(2学时)、系统联调与优化(2学时),采用“理论指导+虚拟仿真+实践操作”一体化教学,层层递进,全程融入工匠精神、职业素养与道德教育,解决教学重难点,实现对教学目标的高度达成。
基于学生学习习惯,采用线上线下混合教学模式,设置课前知识准备、课中实践强化、课后拓展拔高3个教学环节。课前,使用学习通等信息化手段,发布课程任务、讨论及测试题,了解学情,实时更新并调整课中教学任务;课中,采用“评—引—思—学—练—评”教学流程,以学生为中心,引导学生学习,强化实践,促成良好职业素养和工匠精神的养成,并借助信息化工具做好过程性评价,记录学生学习数据;课后,通过学习通发布拓展拔高任务,学生可借助虚拟仿真软件或开放实验室完成拓展拔高任务,通过学习通等信息化平台上传作业或寻求帮助指导,便于教师及时掌握学情,调整下一次课程教学计划,最终形成基于成果导向(OBE)教育理念的闭环教学设计。
4 教学评价
教学评价基于信息化手段,采用自我评价、小组评价(组内及组间)和总结性评价(教师)相结合的综合评价体系[6]。其中,总结性评价侧重过程性评价,借鉴“1+X”证书“工业机器人应用编程”职业技能等级考核标准和工业机器人系统操作员国家职业资格考核标准,将职业素养和工匠精神纳入评价范围,依托内嵌实操数据采集的轻工仿真产线软件、学习通、教学摄像机等信息化手段,全程支撑过程性评价。
5 结语
实践表明,基于“1+X”的工业机器人搬运教学案例设计,提升了教学的针对性。实施“理虚实”一体化教学模式和基于信息化手段的多元教学评价,充分发挥了学生作为课堂主角的作用,积极调动了学生的主观能动性,实现了理论与实践的辩证统一,较好地实现知识、技能及素质目标的达成,为学生学习后续课程、参加“1+X”技能等级考核及就业奠定了坚实基础。
