基于视觉-惯性的四旋翼无人机自主导航系统PID控制的研究
2021-11-29何玲
何 玲
(苏州工业园区职业技术学院,江苏 苏州 215000)
多旋翼无人机自主导航系统主要包含三个部分:1)基于关键帧的单目SLAM,用于无人机的姿态估计;2)扩展卡尔曼滤波(EKF),利用EKF融合视觉姿态以及其他传感器的测量姿态,实现不同数据源的同步,并补偿因无线局域网传输及其他大量计算等原因造成的时延;3)PID控制器,用于控制无人机的姿态,实现无人机飞向或保持在目标位置。本研究基于视觉-惯性,以Parrot公司的AR.Drone 2.0无人机为载体,对四旋翼无人机自主导航系统的PID控制进行了研究。
1 研究内容
1)利用一台笔记本运行控制算法,通过无线局域网实现对Parrot公司的AR.Drone 2.0无人机的自主导航。控制算法主要包含三个部分:同步定位与地图构建(Simultaneous Localization And Mapping,SLAM)、扩展卡尔曼滤波(Extended Kalman Filter,EKF)和PID控制。三者彼此之间的关系如图1所示。
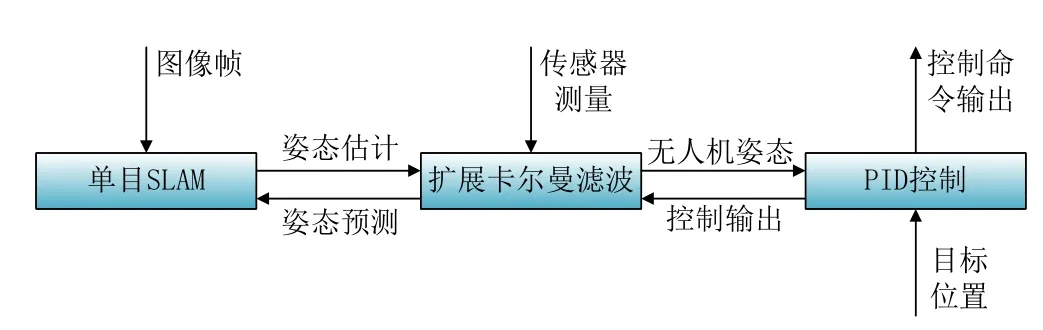
图1 系统示意图
2)SLAM通过相机获取的视频流计算出无人机的姿态估计值。通过底部光流传感器及超声波传感器得到的信息与该估计值比较,计算出地图的尺度。
3)EKF融合SLAM估计的姿态、光流传感器及超声波传感器观测数据以及上次发送的控制命令的可预测效果3种数据,计算出更为精准的无人机姿态及速度的估计值,并预测下个命令对将来状态的预期影响,从而补偿了因通信造成的时延。
4)基于EKF提供的无人机位置和速度的估计值,PID控制用于计算适宜的控制命令,使无人机飞行到或保持在指定的目标位置[1]。
2 PID控制
控制理论目标是控制动态系统的行为。动态系统是指一个状态随时间变化的系统,其中状态可以被一个或多个输入值控制。通常目标是计算系统输入值u(t)使系统达到并维持在期望的状态。换言之,给出的设置点w(t)和系统的测量输出y(t)间的测量误差被最小化。特别地,要求系统能快速到达并维持在设置点,稳定无震荡,能抵消环境引入的各种干扰[2]。整个PID控制过程的示意图如图2所示。
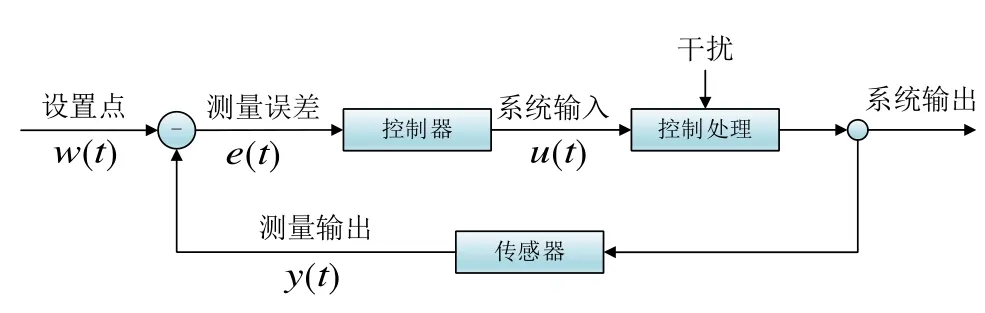
图2 PID控制过程的示意图
PID控制,即比例—积分—微分控制一种通用的闭环反馈控制机制。控制信号由3个独立控制项加权和决定:比例项取决于当前的误差e(t);积分项取决于累积误差微分项取决于预测将来的误差项,基于误差导数如果积分和微分项无法通过测量得出,可近似为PID控制器通过公式(1)计算系统输入值:

其中:Kp、Ki、Kd是可调参数,通常通过试错实验或经验获得,但也有一些启发式方法和准则来帮助这个过程。控制系统的质量由收敛时间tconv来衡量,即e(t)收敛到接近0的指定的阈值内经过的时间。
3 AR.Drone 2.0无人机软件结构的建立
本设计的主要目标是建立一个可靠的、可容错的软件系统来控制AR.Drone 2.0。可容错性是一个巨大的挑战,比如:要求系统能快速侦测到连接的丢失并迅速恢复,以防内部控制状态的丢失。为了解决这个问题,需将AR.Drone 2.0 SDK代码封装在独立的线程里,称之为无人机代理进程,即第一个进程。该进程提供一套清晰的本地接口实现对视频和导航数据的访问以及无人机控制命令的发送。除此之外,它还提供对无人机发出的所有数据录制和重放的功能,从而模拟真实飞行来实现问题的快速定位和解决[3]。
第二个进程,负责检测无人机代理进程的状态,当连接断开或其他错误发生时,自动重启该进程。该进程为用户界面进程。它也提供通过键盘手动控制无人机、管理无人机连接、飞行的录制与回放等功能。
第三个进程,运行主要算法,包括SLAM、EKF和PID控制器以及视频和地图的可视化。该进程为控制进程。
三个进程通过消息管道、共享内存区、互斥和事件来实现视频、导航数据及控制数据的交互。整个软件结构如图3所示。
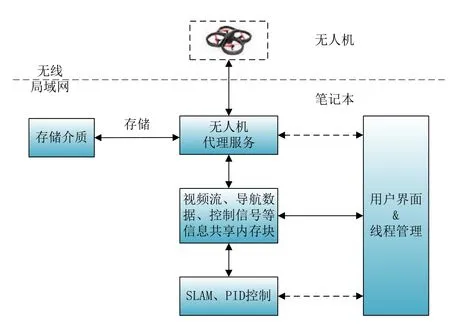
图3 软件框图
4 AR.Drone 2.0无人机的PID控制
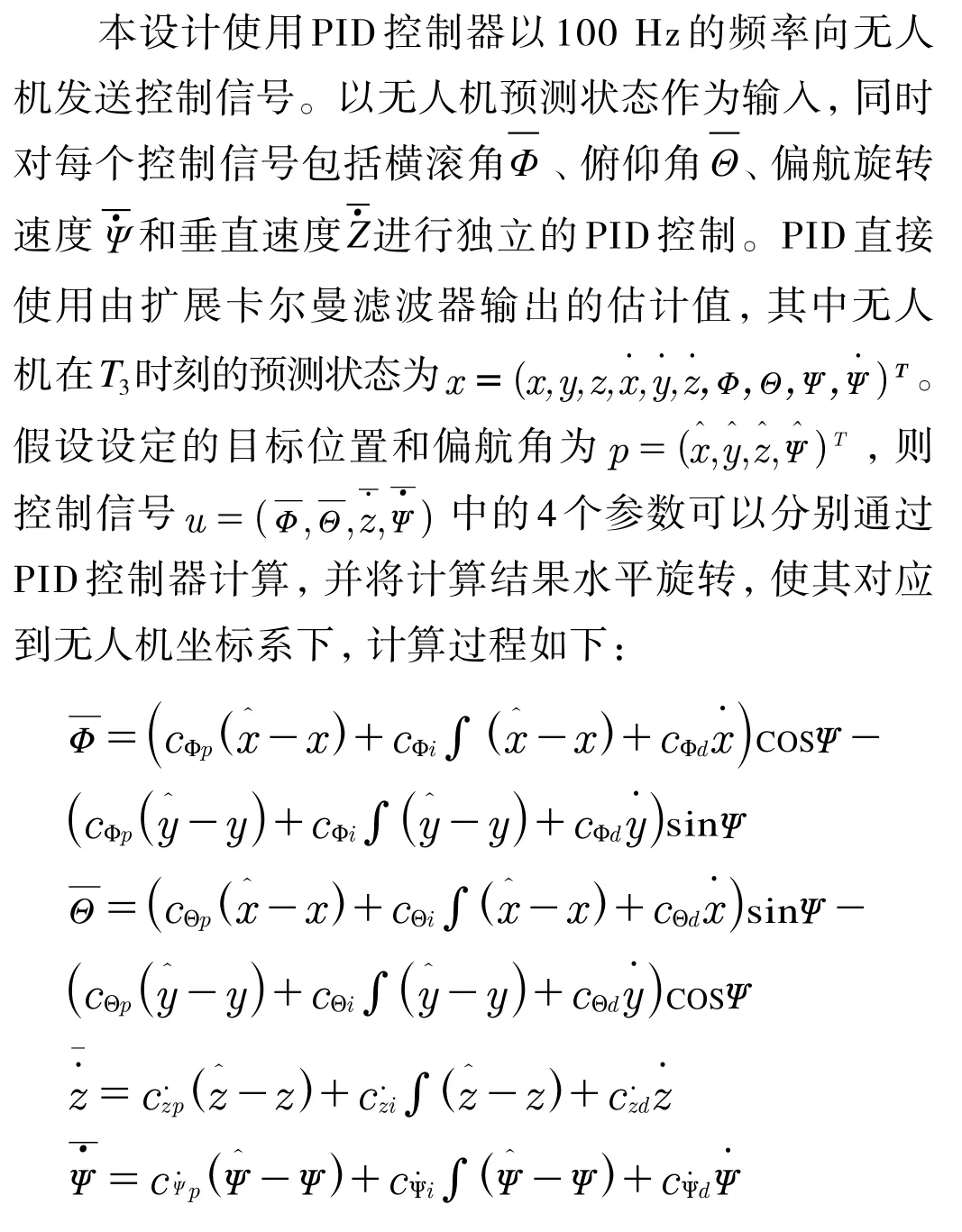
上式中,cΦp表示PID系数,其中下标Φp表示横滚角Φ的比例项系数,其他以此类推。
5 PID控制在视觉追踪恢复中的应用
视觉追踪丢失在很多条件下会发生,比如转动太快、飞行太快等等都会导致摄像模糊,致使追踪丢失。本研究的测试方法是先让无人机悬停在目标位置,然后快速推动无人机,让其迅速离开目标位置并伴有旋转动作,使得视觉追踪丢失,再观测其是否能回退到原始目标位置。理论上,当视觉追踪丢失后,无人机仍可用IMU等信息回退到接近目标点的位置。因为IMU有偏移,所以无法回到原始姿态,但因接近原始姿态,视觉会追踪到原始场景,从而实现追踪恢复,并对IMU的偏移做出补偿,进一步回到精确的原始姿态。该过程中4个控制信号波形记录如图4所示。
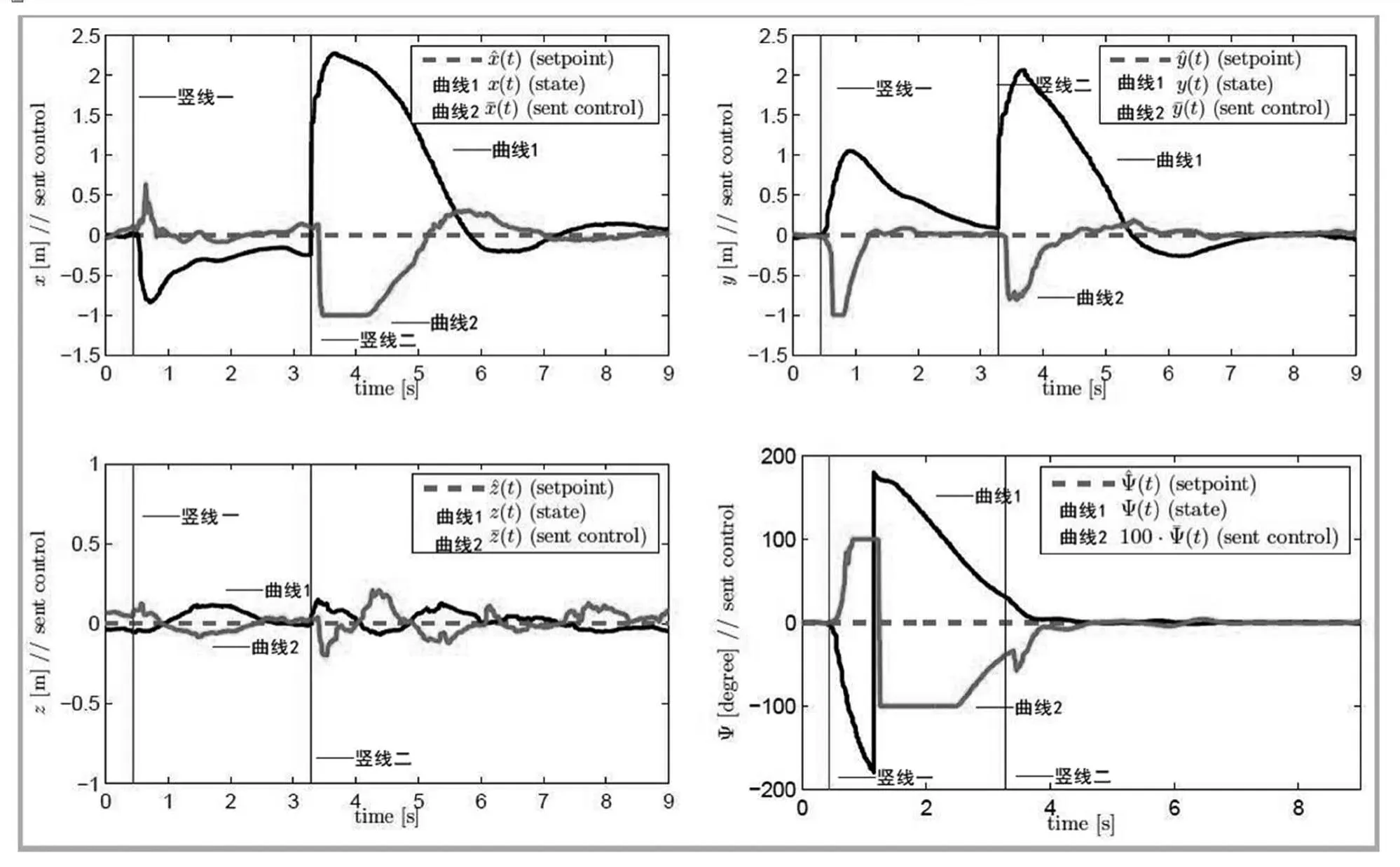
图4 视觉追踪恢复过程中的控制曲线
从图中可以看出,在0.5 s时,无人机被人为推移,并发生转动,导致视觉追踪丢失,如图竖线一处。随后无人机通过IMU尝试回到最初的位置。在3.2 s时视觉追踪恢复,如图竖线二处,无人机进一步调整并回到目标位置[4-5]。
6 结论
从测试结果看,该系统具有一定的鲁棒性,可以在视觉追踪丢失的情况下,借助IMU等信息实现追踪恢复。同时,视觉姿态估计又可以反过来补偿IMU的时间累积误差,限制飞行轨迹出现较大的偏移。
