新农科背景下交叉融合的“人工智能+园艺学”建设的探索
2021-11-28余义和赵晓春高水平郭大龙张会灵张菊平
余义和 赵晓春 高水平 郭大龙 张会灵 张菊平
摘 要:人類正迈入智能时代,人工智能与经济、社会的发展紧密融合,成为推动中国经济高质量发展的重要动力,培养适应智能社会发展所需的跨学科人工智能创新创业人才变得极为必要。在新一轮科技革命和产业革命孕育的背景下,高校需要加强智能类学科建设,探索交叉融合的“人工智能+”建设新模式,提升人工智能领域学科地位并创新拓展其他学科的发展建设方向。文章提出了新农科背景下交叉融合的“人工智能+园艺学”建设的探索,具体提出了通过各种理化仪器设备的开发应用,研究出适宜特定园艺植物资源表型数据的科学、快速、准确的信息采集技术;借助物联网等技术结合本地气候特点,建立特色园艺植物生长发育的环境调控软硬件技术集成;通过将特色园艺植物果实成熟度数字化、信息化,开发人工智能机器人的果实采收的软硬件;通过将特色园艺植物病虫草害发生与防治特征与无人机信息采集技术相结合,实现无人机对园艺植物病虫草害的防治等建设内容,为新农科背景下园艺学人工智能领域的建设发展提供了有益参考。
关键词:人工智能+;园艺学;交叉融合
中图分类号:G640 文献标志码:A 文章编号:2096-000X(2021)33-0001-05
Abstract: Human beings are entering the era of intelligence, and the deep integration of artificial intelligence with economic and social development has become the core driving force for breeding a new round of scientific and technological revolution and industrial transformation. Therefore, it is extremely necessary to cultivate interdisciplinary artificial intelligence innovation and entrepreneurship talents for the construction of intelligent society. In order to meet the urgent need of talent training in the era of intelligence, colleges and universities need to strengthen the construction of intelligent disciplines, explore a new mode of "Artificial Intelligence +" construction with cross-integration, enhance the status of subjects in the field of artificial intelligence, and innovate and expand the development direction of other disciplines. The paper puts forward the exploration of the cross-integrated construction of "Artificial Intelligence + Horticulture" under the background of new agriculture science, specifically puts forward that through the development and application of various physical and chemical instruments and equipment, to develop a scientific, fast and accurate information collection technology suitable for phenotypic data of specific horticultural plant resources. With the help of internet of things and other technologies combined with local climate characteristics, the integration of environmental control software and hardware technologies for the growth and development of characteristic horticultural plants was established. By digitizing and informatization, the fruit maturity of characteristic horticultural plants, the software and hardware of artificial intelligence robot for fruit harvesting are developed. By combining the occurrence and control characteristics of characteristic horticultural plant diseases, insect pests and weed with the information acquisition technology of unmanned aerial vehicle(UAV), the prevention and control of horticultural plant diseases, insect pests and weeds by UAV was realized the construction content. The study provided beneficial reference for the construction and development of artificial intelligence field of horticulture under the background of new agriculture science.
Keywords: artificial intelligence plus; horticulture; cross-integration
当前世界,气候的变化,水资源短缺导致生态环境脆弱,全球粮食供应不足,农业劳动力减少等问题对世界农业和农村可持续发展的威胁日益严重。我国是农业大国,随着经济的快速发展和城镇化进程的推进,果树、蔬菜、花卉及观赏树木等园艺植物在我国农业种植中的比例不断增大,园艺产品在国民经济中的作用日益增强。但其专业化和集约化发展缓慢、劳动力投入大、生产成本高、产品质量缺乏安全保障等问题严重影响了我国园艺产业的快速发展。人工智能(AI)是基于计算机技术模拟或实现的智能,通过将遥感、物联网、互联网、大数据、云计算等现代化信息技术与农业生产、经营、管理和服务进行深度融合,推进农业进入信息化的高级阶段。通过借助人工智能技术来实现农业信息感知、定量决策、智能控制、精准投入、人性化服务等多种多样的农业生产方式[1],有助于节约农业生产过程中的人力和物力、优化资源要素的配置、促进供需之间的有效对接、高效精准治理[2],为推进农业农村可持续发展、农业新旧动能转换以及精准脱贫、乡村振兴提供了新的更好的方案。实施国家大数据战略,推进数据资源开放共享,利用人工智能技术改变传统农业模式,实现高效生态现代农业已成为现代园艺产业发展的方向。目前,在我国智慧农业还处于起步阶段,人工智能与园艺学科交叉融合研究比较薄弱,急需加快园艺智能化应用研究,让人工智能与园艺交叉融合,成为现代化科学与产业的前进动力。
园艺智能化应用系统将园艺植物在产前、产中、产后的各个阶段所涉及的各类种质资源对环境因素需求的信息进行采集和综合,利用实时传递影响园艺植物生长与生产的环境因素,在线指导园艺植物的生长和生产,对生产过程中产生的各种缺素症状或生长问题进行定性诊断和定量决策,为园艺植物的高产和高品质生产提供科学决策。主要包括通过各种理化仪器设备的开发应用,研究出适宜特定园艺植物资源表型数据的科学、快速、准确的信息采集技术;借助物联网等技术结合本地气候特点,建立特色园艺植物生长发育的环境调控软硬件技术集成,实现园艺植物生长环境的人工智能调控;通过将特色园艺植物果实成熟度数字化、信息化,开发人工智能机器人的果实采收的软硬件,实现园艺产品的智能机器人采收;通过将特色园艺植物病虫草害发生与防治特征与无人机信息采集技术相结合,实现园艺植物病虫草害无人机防控。
一、基于计算机视觉的园艺植物资源识别采集模块设计
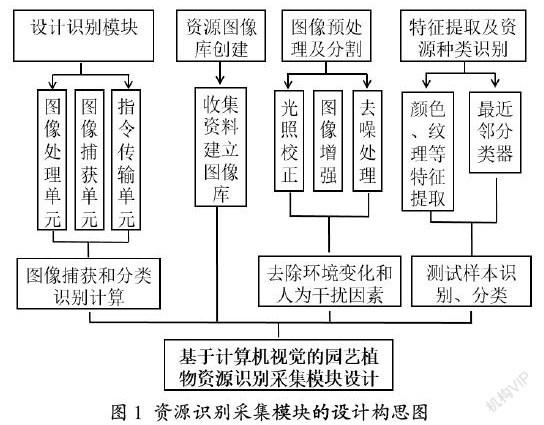
地球上的园艺种类繁多,各种不同的园艺植物资源之间都存在各自的生长习性,这些特性可以用于自然环境或人工模拟环境条件下的园艺植物的生长规律的研究,进而对园艺植物资源挖掘和利用的研究、以及园艺植物对自然环境的适应等领域起到了很大的帮助,能够节约人力物力,提高工作效率,但是同一种植物因为其生长环境、周期以及基因突变等影响,致使园艺植物在形态上各不相同,差异极大,所以就算对专业人士来说,植物识别也不容易完成。随着生命科学和现代信息技术的不断发展,园艺植物分类学也得到了快速发展,基于图像分析的植物分类识别是当下园艺植物种质资源研究的热点问题,因此图像分类问题也是计算机视觉等领域的重要研究方向之一。目前识别算法的发展已经相对较为成熟,在叶、花、果实等传统的植物识别技术已经得到许多研究,然而基于多器官的现实世界识别方法的认识还不是很多,因为其在近几年才得以进行,起步较晚,如芍药和牡丹,它们之间由于种类间差异较小,难以分辨不同种类的植物,其分类相对困难。对植物的识别来说,造成一定干扰的是处于现实世界中的植物所处的较为复杂的环境,这些复杂的环境会降低植物特征提取的准确度,比如杂草、石子、泥土和建筑物等。因此,对现实世界中的植物识别,如何获取植物图像显著性特征以及获取种类之间差异更大的性状以实现网络特征增强是研究的重中之重。Champ等改进了GoogLeNet模型的卷积神经网络(CNN)方法,应用各种衰减因子来修正CNN给出的概率分布,实现了基于植物真实性状的园艺植物种类识别[3]。该方法通过提取卷积神经网络的最后一层代表性特点来进行分类,但是仅凭一层特点的识别能力和代表性比较差,不能有效鉴别出性状类似或同一种群的园艺植物[3]。Lee等利用CNN模型结合物种和组织特征进行植物分类,对基于验证集和測试集的结果进行分析,提出了高层融合体系结构[4]。Mc Cool等提出了一种针对特定领域的混合神经网络模型对植物图像进行自动分类[5]。通过微调一个专门用于植物分类任务的已知模型,可以学习特定领域的模型。MixDCNN模型是通过首先对一个模型的子集数据进行微调来学习的,可以使用不同的器官类型进行分类,利用混合DCNNs框架对KDCNN模型进行联合优化[5]。Xiao等为了研究真实世界中的物种识别问题,提出了一种新的深度学习框架和有效的数据扩充方法。首先根据视觉注意来裁剪图像,称之为新的数据增强方法注意裁剪(AC),然后通过训练深度卷积神经网络从大量数据中预测物种。通过对数据扩充方法AC的性能进行了评估,结果表明AC具有优越的性能[6]。综上所述,以实际应用为背景对园艺植物图像特征分类器这一经典算法为出发点,设计以计算机视觉为基础的园艺植物识别模块(图1)。
二、构建园艺植物智能平台,实现园艺植物生长发育的调控
为构建更完善的园艺植物智能平台,更科学的在线指导园艺植物生产,提高植物产量,一套完备的能满足不同需求层次的智能平台系统的需求迫在眉睫。
1. 框架模型的建立:由于园艺植物生长发育过程中,不同植物所需的外界环境条件各有差异,栽培技术也有所不同,因此就需构建一个较为全面的数据知识库框架,能够综合不同园艺植物生长过程中的各项指标,汇总整理高产量园艺植物的基础数据。不同园艺植物生长发育全过程中的水分、温度、光照等环境因素指标以及养分供给状况、栽培管理技术差异等数据进行记录、收集、汇总,构建动态图,通过对优质园艺植物的生长数据进行分析,研究不同因素之间的连锁反应和综合效应,建立园艺植物生长发育特性、以及温度、光照、水分、肥等环境因素和栽培管理技术关系的数据库框架。种植技术员可根据不同栽培地区的实际情况对框架模型参数进行调整,以适用于自己掌握的园艺植物栽培技术知识模块;使用者也可推送不同的数据信息给数据管理者,扩大数据库数据量,参与数据库的更新与完善。数据库管理者也可对不同的数据模型库进行查询、及时修改和动态调用[7]。
2. 系统结构的构建:智能化平台的功能包括通用平台、智能系统和实用信息系统3个层次[4]。通用平台由知识储备量庞大的数据库信息组成,涵盖广泛,便于不同知识层次的使用者更快更广地查询到所需内容;智能系统需要收集汇总不同环境和地区园艺植物生长差异数据,及时更新平台的数据,为使用者提供一个数据更全面、更具体、内容更丰富的参考平台,为种植技术员提供一个积极的二次开发的环境和工具,满足不同生态背景下不同生产管理者的需要。
3. 可视输入平台的构建:设置一个便于简易操作的包含数值上下限的参数录入方式,同时设置数据自查系统,对操作者上传的不合理的参数及时提醒更正,保证数据输入的及时性、准确度和合理性。对不能给出准确参数的用户,根据其提供的园艺植物品种和种植环境条件,调动数据库存儲的内容,智能辨别并输入,增加平台的使用率。可视输入平台不仅要做到便于使用者对编辑数据,还应该确保数据准确度[8]。
以人工智能控制系统为核心部分,并从软件和硬件方向分别对人工智能控制系统进行研究讨论,比如S3C6410型操作系统是性价比较高的软件,而A1203 型号湿度传感器、DS18B20型温度传感器、Po188-C型光照度传感器及S3C6410型RSIC处理器则为价格适宜的硬件。由于智能化管理平台为园艺植物生长发育提供了综合信息技术咨询和园艺领域内的专家数据库,可以基于不同管理者和种植技术员的需要,为用户提供基于环境、土壤的综合评价信息进而提供有力可行的决策意见,对园艺植物的生长发育和高品质起着积极的促进作用。智能化平台在设计过程中完全采用了可视化操作技术,管理员在使用过程中可以基于个人的不同需求和不同知识背景直接操作,不需要依赖技术员或者是平台的开发人员修改程序,可以依据不同园艺植物种类或不同生态条件实现平台的二次开发和利用,加大人工智能使用率,为实现园艺植物高效和高品质生产提供在线指导和科学决策。
三、设计园艺植物果实采收的人工智能机器人
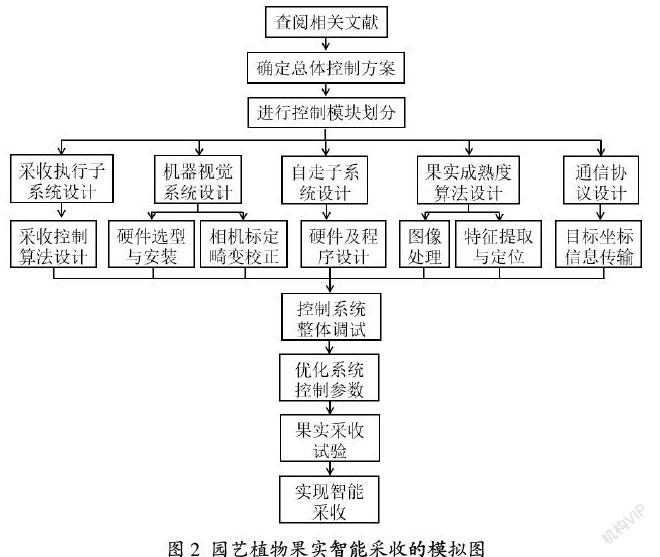
针对园艺植物果实选择性采收的视觉定位要求,设计了排除园艺植物枝条、叶片和花朵等性状,仅适用于园艺植物果实特异性识别与定位的图像处理算法,在视觉系统中利用专业识别相机的标定及畸变校正而获取高质量的园艺植物采收区域图像,进而建立坐标转换识别模型,开发智能机器人控制系统,从而实现上位机与下位机模块的逻辑配对功能,同时为提高园艺植物果实的采收效率,针对采收系统设计的两个收获点设计收获路径优化算法[9]。通过大量采收试验,优化控制系统的工作参数,达到自动化采收的目的(图2)。
园艺植物果实采收的人工智能机器人包括以下几个程序:
1. 图像的预处理:图像识别是果实采摘的前提,为使机械手臂高精度对准目标果实,对目标植物进行识别具有关键性作用。图像识别包括图像预处理、图像分割和特征识别等。图像预处理主要提高图像的质量,除去噪音提高图像清晰度。李振雨等针对果实晃动、多层重叠影响机器人采摘精准度和效率的问题,研制了适宜在山地及农田环境下利用视觉检测技术和机器人精准定位抓取技术的苹果高精度采摘系统[10]。该系统首先利用精准图像处理技术对初始图像进行图像多次预处理;再根据分析后的图像角点提取算法计算图像曲率,通过计算曲线段上的多个像素平均角方向之间的差值对曲率进行多次平滑处理,获取图像曲率集中峰值点;最后对图像曲率峰值点进行像素坐标标定,并将该点像素坐标定位进行坐标转换,作为机器人的定位抓取目标点,机器人根据定位目标点的位置信息调整运动姿态对果实进行实时追踪和识别,实现果实的精确定位、抓取和采摘[10]。
2. 目标的识别与分割:图像分割是图像处理和分析过程中的重要一步。图像分割是将相机获取的图像中具有不同识别物的不同区域进行划分,划分的时候使得这些区域相互不交叉,且每一个区域满足特定的颜色、纹理、灰度等特征的识别准则。图像分割方法可以分为固定阈值、区域生长、边缘以及形状的图像分割方法,其中基于固定阈值的图像分割办法能够快速有效地将目标图像区域从背景中区分出来,是最为有效的图像分割方法。王丽丽对番茄采摘机器人的底盘行走控制方法、番茄自动识别与定位、采摘机械臂、系统集成等关键技术进行了系统研究,研发了具有果实目标自动识别与定位、自主导航移动、机械手自动采摘功能的番茄采摘机器人[11]。采用Otsu算法以及椭圆模板法对成熟的、多层次的番茄图像进行分割,然后特异性选取包含番茄彩色图像的区域得到匹配点的三维坐标,该方法的成功率和精准率分别为99%和97%[11]。
3. 图像的特征匹配:在图像分割成功之后,需要对图像进行特征匹配。特征匹配方法主要分为基于特征提取方法以及灰度值的相关方法。由于猕猴桃的特殊形状,张瑞华等人利用Hough变换来匹配猕猴桃果实的图像特征[12]。因为一幅完整的图像会占用更大的背景区域,而且背景区域越大,图象识别就越复杂。采用最小外接矩形法在图像中划定目标区域,减少了椭圆拟合猕猴桃的处理面积,提高了运算效率。
4. 植物采摘的定位技术:最后一个重要步骤是要在世界坐标系中确定水果采摘点,定位的准确性直接关系到后续采摘的成功。定位功能模块采用多目立体视觉系统从不同的视角获取到多幅图像,并且根据视觉相差原理获取到真实物体的三维信息,同时获取图像的深度信息,进行精准测距,领取三维坐标图谱。摄像机获得原始头像信息后,经过图片处理后,能够从背景中将水果目标分隔出,通过利用双目视觉的特点计算出水果的空间位置信息来检测目标的立体信息。司永胜等人提出了用归一化红绿色差(R-G)/(R+G)对苹果图像进行分割,并在不同环境条件下对多维苹果图像进行识别和定位的方法。研究结果表明,这种方法能有效地消除环境不一致而引起的影响,定位精确率可达到92%[13]。
使自动化转为人工智能化,需要将图像处理技术应用到农业领域,提高生产效率,节约人工、物力以及财力。
四、无人机对园艺植物病虫草害的监测与防治
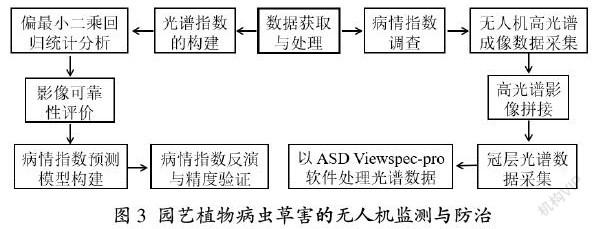
借助低空无人机为探测平台,使用高光谱分辨率的新型成像光谱仪作为传感器,获取农田数据,构成低空遥感技术平台。分析不同光谱指数,借助最小二乘法对病情指数估测的能力,综合病情指数构建植物病虫害空间监测模型。根据园艺植物病虫草害的严重程度,合理规划用药量和管理方式,利用无人机进行喷施作业或者适当管理,可大大减少成本消耗,减少对环境的污染,从而提高园艺植物产量和品质,实现农业精准管理(见图3)。 国内的农用植保无人机种类繁多,空机重量差异大,飞行速度慢,低空作业一般在5m以下。按结构分为单旋翼和多旋翼2种,单旋翼无人机荷载量大,一般可载5~20L;多旋翼无人机荷载量小,但其结构简单,使用成本低,效率高,受到大家的欢迎。按动力分为电动和机动2种,电动无人机的动力核心是电动效率,无人机单次飞行的时间较短,使得其载药量偏小,电池续航是限制其使用时间的关键因素之一。机动无人机的动力核心是发动机,单次飞行时间可达1h,载药液量大,但灵活性差,需要一定的起降时间,对操作人员要求高,飞机维护成本高。截止到2016年,在我国已有160多种农业无人机投放市场,开展园艺植物的病虫害防治和施肥浇水等工作[14]。生产实践结果表明,无人机在空中作业应该符合农业生产的实际需求。目前,无人机喷洒的人工控制已不能适应现代农业的发展。随着精密喷涂的不断实施,人工控制大面积喷涂的弊端逐渐显现。发展先进的控制技术势在必行,随着信息技术的发展,很多新技术与无人机相结合,例如GPS导航技术、DSS系统、遥感技术、GIS系统等新技术,使航空植保得到了进一步的良好发展[14]。
在国家重要战略实行的背景下,顺应农业工程由机械化、自动化向信息化、智能化发展的前景,积极与人工智能对接,推进信息科技和先进制造技术在农业机械装备和农业机械作业中的应用,实现“多功能、自动化、智能化”,支撑农业可持续发展。针对人工智能普适性、渗透性、应用性強的特点,尽快建立人工智能与园艺学科交叉融合的研究中心,构建产学研协同育人模式,开展人工智能与园艺学融合研究,推动园艺复合型人才培养,促进园艺创新发展和人工智能深入应用,实现与行业未来需求对接,提升学生的创新能力和创业意识[15]。
参考文献:
[1]赵春江.人工智能引领农业迈入崭新时代[J].中国农村科技,2018(1):29-31.
[2]张辉.发展智慧农业 助力农业农村现代化——2019人工智能在现代农业中应用对话交流活动上的致辞[J].农业工程技术,2019,39(27):20-21.
[3]Champ J, Goau H, Joly A.Floristic participation at lifeclef 2016 plant identification task[J]. Conference and Labs of the Evaluation Forum,2016:450-458.
[4]Lee S H, Chang Y L, Chan C S.Plant Identification System based on a Convolutional Neural Network for the Life Clef 2016 Plant Classification Task[J]. Conference and Labs of the valuation Forum,2016:502-510.
[5]Mc Cool C, Ge Z Y, Corke P I.Feature Learning via Mixtures of DCNNs for Fine-Grained Plant Classification[J].Conference and Labs of the Evaluation Forum,2016:511-517.
[6]Xiao Q G, Li G Y, Xie L. Real-world plant species identification based on deep convolutional neural networks and visual attention[J]. Ecological Informatics,2018:48.
[7]武书彦,朱坤华,王辉,等.人工智能系统设计在园艺栽培生产中的运用[J].农机化研究,2018,40(2):216-220.
[8]赵春江,杨宝祝,吴华瑞,等.农业智能系统平台(PAID)研究与应用[R].北京:国家农业信息化工程技术研究中心,2004.
[9]窦宝钢.基于机器视觉的白芦笋选择性采收机器人控制系统设计及试验[D].泰安:山东农业大学,2019.
[10]李振雨,王好臣.基于视觉识别定位的苹果采摘系统研究[J].图学学报,2018,39(3):493-500.
[11]王丽丽.番茄采摘机器人关键技术研究[D].北京:北京工业大学,2017.
[12]张瑞华,曾嘉远,甘爱芬.猕猴桃图像识别与特征提取程序设计[J].机电工程技术,2019,48(9):171-173.
[13]司永胜,乔军,刘刚,等.苹果采摘机器人果实识别与定位方法[J].农业机械学报,2010,41(9):148-153.
[14]兰玉彬,邓小玲,曾国亮.无人机农业遥感在农植物病虫草害诊断应用研究进展[J].智慧农业,2019,1(2):1-19.
[15]王国胤,瞿中,赵显莲.交叉融合的“人工智能+”学科建设探索与实践[J].计算机科学,2020(4):1-5.