非接触式人体生命信号检测方法研究
2021-11-27罗朗娟
罗朗娟,张 洽
(1.重庆邮电大学医院,重庆 400065;2.重庆大学附属中心医院重庆市急救医疗中心,重庆 400014)
0 引言
生命信号作为现代化医疗检测中的重要指标,能够为医生提供可靠的诊断和治疗依据。因此,对呼吸、心跳等生命信号特征参数进行准确、实时的监测对临床疾病诊断、健康监测等领域的发展具有非常重要的促进作用[1]。传统生命信号检测方法一般是通过穿戴式传感器或粘贴式电极直接接触人体来实现的。相比之下,非接触式的生命信号检测方法因其可以进行远距离、长时间监测呼吸和心跳等生命信号,且无需接触检测设备,给人以轻松、舒适的体验感受。近年来,随着毫米波雷达的发展,非接触式人体生命信号检测方法在一些新兴应用领域(如医疗监护[2]、站位感知[3]等)中逐渐成为研究热点。应用于医疗生命监测领域的雷达系统有脉冲雷达、多普勒雷达和调频连续波(frequency modulated continuous wave,FMCW)雷达[4]。相比脉冲雷达和多普勒雷达,FMCW雷达能够同时检测目标的距离和多普勒信息,已经成为生命检测和交互式手势感应领域的主流选择[5-6]。因此,本文将利用FMCW雷达实现非接触式人体生命信号的检测。
张杨等[7]提出了基于能量谱的多目标探测识别算法,解决了单基地生命探测雷达在多人体目标探测与识别时容易漏判的问题,提高了识别准确率,但文中没有讨论心跳信号的提取和识别问题。王昭昳等[8]利用人体生命体征会引起信号振动的特点,提出了基于超宽带生物雷达的压埋人体识别方法,但该方法无法检测人体的心跳信息。张华等[9]给出了35 GHz雷达中基于滤波的心跳信号分离技术,但在实际使用中用户往往难以获得心电图(electrocardiogram,ECG)信号。自Sharpe等[10]首次提出利用FMCW毫米波雷达实现生命体征检测后,Anitori等[11]采用24 GHz FMCW雷达进行心跳信号检测,尽管消去了环境噪声和多人之间的干扰,但没有考虑人体微动对心跳信号的干扰。Alizadeh等[12]使用9.6 GHz的FMCW毫米波雷达进行呼吸和心跳频率的检测,并给出了基于信号幅值和相位的呼吸频率和心跳频率计算方法,但没有讨论噪声对呼吸频率和心跳频率的影响。Park等[13]利用77 GHz FMCW毫米波雷达中频信号的相位信息检测人体生命信号,不仅避免了高次谐波影响,也解决了I/Q 2路信号引起的直流信号偏移。然而,由于呼吸信号谐波会掩盖心跳信号谐波以及环境噪声的存在,文献[13]中分离出来的呼吸和心跳波形不准确。
基于此,本研究采用77 GHz FMCW毫米波雷达实现生命信号的检测。首先,介绍FMCW毫米波雷达的工作原理;其次,在人体目标检测、相位提取基础上,提出噪声消除方法,并设计无限脉冲响应(infinite impulse response,IIR)带通滤波器分离呼吸和心跳信号;最后,将得到的呼吸频率和心跳频率分别与呼吸传感器和智能手环进行对比,以验证FMCW毫米波雷达用于生命信号检测的可行性。
1 FMCW毫米波雷达工作原理
FMCW毫米波雷达包含发射天线、接收天线、射频、模数转换器和数字信号处理器等组件。FMCW毫米波雷达中频信号产生原理是通过天线发射射频模块产生的调频连续波信号,接收经人体反射后的回波信号,并与发射信号混频得到混频信号,然后利用低通滤波器滤除高频分量,最后通过采样和基带信号处理即可得到中频信号,如图1所示。
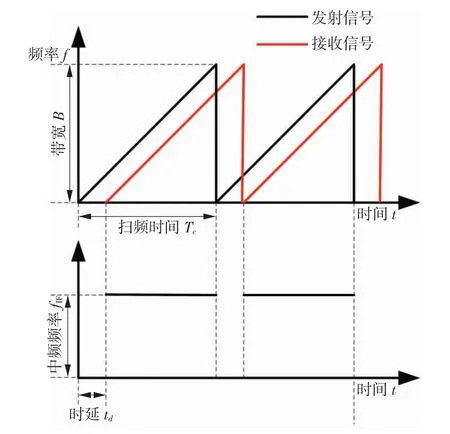
图1 中频信号产生原理图
FMCW雷达发射信号x(Tt)可表示为

式中,B为带宽;fc为线性调频信号起始频率;ATX为发射信号的幅值;Tc为线性调频信号脉宽;φ(t)为相位噪声;t为时间变量。
人体胸腔到雷达的距离为 x(t)[x(t)=R(t)+d0,其中d0为人体与雷达的距离,R(t)为胸腔运动位移],发射信号x(Tt)经过距离d0后到雷达接收端产生时延 td[td=2R(t)/c,c 为光速],因此接收信号 x(Rt)可表示为

式中,φ(t-td)为 φ(t)经 td后的相位;ARX为接收信号的幅值。发射信号和接收信号经混频后,能够得到中频信号SI(Ft),即
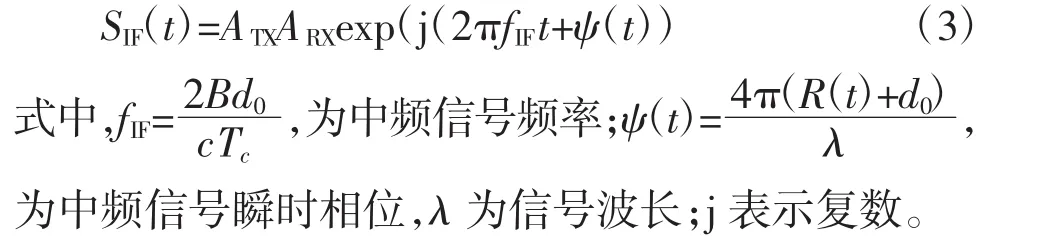
由于人体胸腔运动速度较慢,不超过1 mm/1 μs=103m/s,在单扫频的 μs级时间内 R(t)很小,且近似于一个常数。因此,为了观察胸腔位移变化需顺序发射多个扫频信号,即对R(t)采样。假设发送l个扫频,R(t)采样时间间隔为 Tm(即帧周期)。当 Tm≥Tc时,R(t)出现在相对应目标距离单元的相位上,时延td变为

式中,R(lTc+t)表示距离的变化。胸腔扩张引起的位移运动一般为余弦信号形式,容易证明 R(lTc+t)=R(lTc)。将公式(4)代入SIF(t),可以得到

式中,Tm为中频信号采样周期;n为采样点数;人体生命信号引起的振动(即R(lTc))隐藏在相位ψl中。因此,从采样的中频信号中找到fIF能够估计人体的位置,从ψl中可估计生命信号引起的振动频率。
2 人体生命信号检测方法
生命信号属于微弱信号,其振动产生的位移一般为毫米级,可以利用毫米波信号的相位变化确定生命信号的振动位移,从而实现对生命信号的有效检测。尽管多普勒雷达可以检测到生命信号产生的微多普勒信号,但环境中的干扰、噪声以及人体的微多普勒信号等干扰非常严重,往往会掩盖生命信号。因此,利用FMCW毫米波雷达估计人体位置,再提取人体位置区间的信号,能够有效减小环境中微多普勒对生命信号的影响。本文实现人体生命信号检测的具体流程如图2所示。首先利用FMCW毫米波雷达采集人体生命信号I/Q 2路数据,并利用快速傅里叶变换(fast Fourier transform,FFT)估计人体目标的距离,从而确定人体位置;然后,提取人体位置所在距离区间上由呼吸和心跳引起的相位信号,再对得到的相位信号进行差分和噪声去除;最后,利用IIR带通滤波器分离呼吸和心跳信号,再计算呼吸频率和心跳频率。

图2 人体生命信号检测流程
2.1 人体目标检测
根据FMCW毫米波雷达工作原理可知,雷达发射扫频信号后经过一定延时能接收到回波信号,再经过混频和滤波后,能够得到中频信号。通过对中频信号进行模数转换(analog-to-digital converter,ADC)采样,再对中频信号采样点进行FFT,得到人体到雷达的距离。根据采集得到的多个扫频信号可以构成一个二维矩阵,其中包含采样点的一个扫频时间维度,即为快时间域,多个扫频信号累积的维度构成慢时间域。对快时间域单扫频信号的采样点进行FFT可以获取中频信号频谱,其频谱峰值对应不同距离的人体目标[14]。尽管利用单个扫频信号可以确定人体目标,但由于环境中存在杂波和噪声,一发一收得到的人体位置往往变化较大,而本文采用的FMCW毫米波雷达具有2根发射天线和4根接收天线,可以组成1个1发8收的虚拟天线阵。因此,可以将8路虚拟中频信号进行叠加,再进行FFT,可以有效抑制杂波功率。在连续发射2个扫频信号时间内,因扫频持续时间极小(单个扫频持续时间为50 μs),人体的位置变化可以忽略不计。因此,准确找出人体胸腔至心脏所在的距离区间并提取该区间上的相位信息,能够减少环境中的噪声和干扰产生的微多普勒信号对生命信号的影响。
2.2 生命信号相位提取
利用FFT确定人体所在位置后,为实现生命信号检测,需要提取人体位置所在距离区间上的相位信息。通常可以利用反正切解调方法恢复生命信号的相位 φ(t),即

式中,I(t)和Q(t)分别表示I、Q 2路正交的基带信号。
然而,由于噪声、电路等原因导致的直流偏移,使得相位反正切解调时是非线性的。本文采用圆中心动态直流偏移跟踪方法[13]对直流偏移进行校正。尽管直流偏移校正能够解决非线性问题,但是由于呼吸引起的胸部位移变化约为10 mm(是毫米波波长的数倍),使得反正切解调技术解调出来的相位(-π/2,π/2)不连续和跳变会引起相位模糊问题。为了解决该问题,本文使用扩展的微分交叉乘法(differentiate and cross multiply,DACM)算法[14]。首先,对公式(7)进行微分,可以得到相位变化信息,即
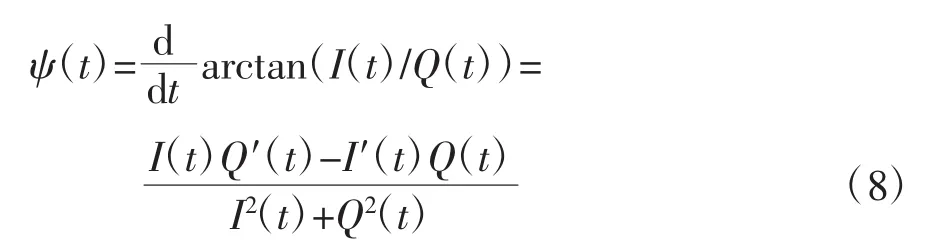
式中,I′(t)和 Q′(t)分别为 I(t)和 Q(t)的时域一阶微分。然后,对公式(8)进行积分,得到积分相位的离散表达式为
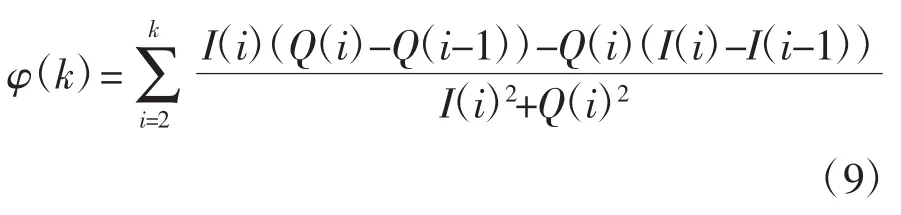
式中,φ(k)表示第k个采样点的相位;I(i)和Q(i)分别为I路和Q路信号的第i个采样点数据。
因此,DACM算法可以自动进行相位补偿和相位解缠绕,解决了相位模糊问题。由于心跳频率微弱,很容易被淹没在呼吸基频谐波和噪声中。本文对DACM相位展开后的信号进行相位差分,即相邻连续相位值进行差分f(k)=φ(k)-φ(k-1)。通过相位差分在增强心跳信号的同时又能抑制相位漂移现象。
2.3 噪声消除
由于噪声的影响,相位差分信号中可能包含错误相位值,从而影响生命相位提取的准确性。因此,本文利用分段线性插值方法去除噪声对相位的影响。当相位差分值大于给定的阈值时,则采用分段线性内插值替代原先相位差分值。定义区间[ki,ki+1]上的子插值多项式Fi为

式中,ki表示相位信号(fk)的第i个采样点。那么,在整个区间[ki,kn]上的插值函数 F(k)为

其中,l(ik)的定义如下:

本研究使用分段线性插值方法得到的内插值替换原有错误的相位差分值,可以有效去除相位差分信号中的噪声,提高呼吸和心跳频率区间的信噪比,从而大大提高心跳频率和呼吸频率的准确性。
2.4 呼吸与心跳信号分离及频率计算
一般呼吸频率(单位:Hz)区间为[0.2,0.8(]12~48次/min),心跳频率(单位:Hz)区间为[0.8,2(]48~120次/min)。因此,为了得到人体的呼吸和心跳信号,本研究采用IIR带通滤波器从频域上对呼吸和心跳信号进行分离。IIR带通滤波器冲激响应的差分方程为

式中,xi-r和yi-k分别为去噪后相位信号的输入和输出;br为正向系数;ak为反向系数。该无限冲激响应函数的z变换函数可以表示为

式中,X(z)和 Y(z)分别为滤波器的输入和输出,并且n≥m。
本研究采用四阶IIR带通滤波器,其传递函数为
式中,k(k=1,2,…,N)为级联级数,其中 N 为延迟单元数。
根据心跳频率和呼吸频率所在区间,即呼吸频率(单位:Hz)为[0.2,0.8]和心跳频率(单位:Hz)为[0.8,2],设定采样率为 20 Hz,在零初始条件下,经过呼吸和心跳频率范围滤波可以分别得到心跳和呼吸信号输出序列,从而实现对心跳和呼吸信号分离。
根据IIR带通滤波器分离出来的呼吸和心跳信号,并选取呼吸频率和心跳频率所在的频率区间上幅度最大的频率作为呼吸和心跳信号的频率,再将该频率乘以60,即可得到人体每分钟的呼吸频率和心跳频率。
3 实验结果及分析
3.1 雷达参数配置
为了验证本文方法的有效性,在实验中采用的FMCW毫米波雷达为德州仪器公司的AWR1642雷达板,并采用DCA1000高速数据采集卡采集雷达信号。通过将DCA1000与AWR1642联调,并通过以太网网口使用用户数据包协议(user datagram protocol,UDP)将雷达信号传输到计算机上。本文使用的AWR1642雷达板具有2根发射天线和4根接收天线,并且2根发射天线交替发射扫频信号,每个扫频信号持续时间设为 50 μs,脉冲间隔为 7 μs,发射的锯齿波斜率为70 MHz/μs,帧速率为50 ms。每帧内2根天线分别发送1个扫频信号。在实验过程中,被测试者静坐在雷达正前方。
3.2 结果及分析
(1)确定人体位置。
将一帧内发射的2个扫频信号经过4根天线接收后组成的8路虚拟信号进行叠加,再利用FFT进行距离估计,能够得到如图3所示的距离估计结果。由图3可知,被测试人体目标静坐于距离雷达0.45~0.7 m,且在 0.5~0.65 m 范围内信号最强,并且随着时间的推移,人体仍然能保持在这个距离区间,进一步说明了人体目标静坐于雷达板正前方。同时,从图3可以看出,FMCW雷达在0.1 m距离内存在频谱泄漏,但与人体反射信号(0.4 ~0.7 m)相比,该频谱泄漏是可以忽略的。因此,为了实现生命信号检测,只需要提取0.5~0.65 m之间信号最强位置处的相位信息,可有效避免其他距离区间上微多普勒信号对人体生命信号检测的影响。
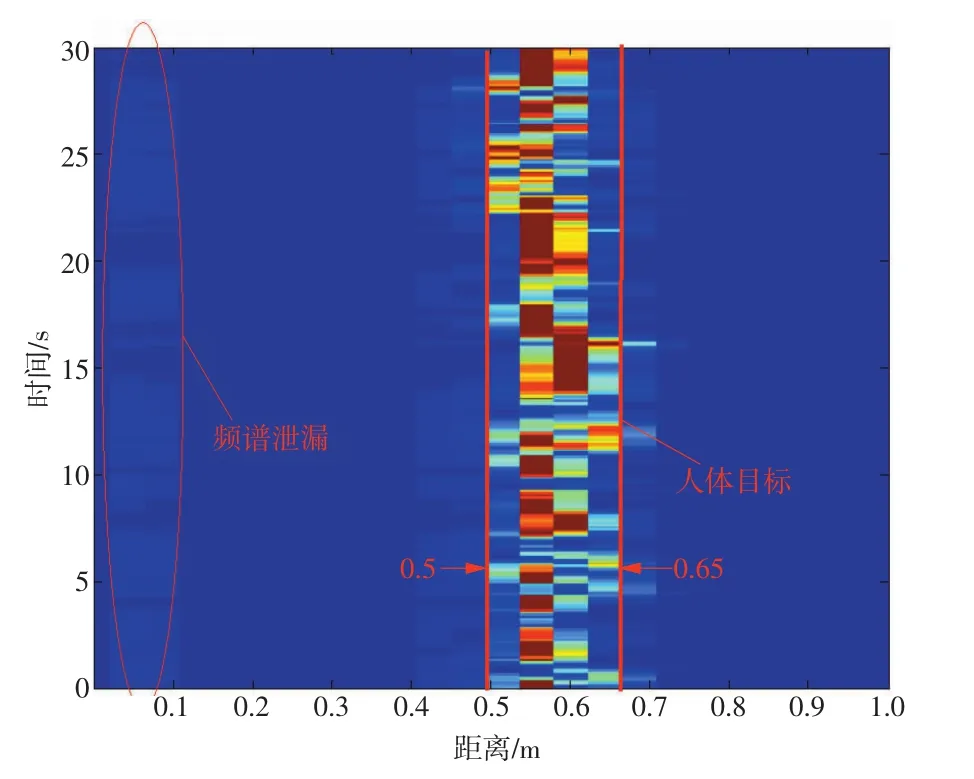
图3 人体位置与时间关系
(2)噪声对相位信号波形和频谱的影响。
为了分析相位差分和噪声去除的效果,本文对比了相位差分前(原始相位)、相位差分后(差分相位)和利用分段线性内插值方法去噪后人体生命信号的相位波形,如图4所示。由图4可以看出,相位差分前的人体生命信号相位变化较大,相位差分后的相位信号规律性较好。而对比图4(b)、(c)可以看出,分段线性内插值方法能够去除差分相位中由椒盐噪声等引起的相位误差。

图4 去噪前后相位波形对比
将去除椒盐噪声后的相位信号经过2个IIR带通滤波器分离出心跳和呼吸信号,得到如图5所示的呼吸与心跳信号相位波形及其对应的频谱。由图5可以看出,呼吸信号和心跳信号的时域波形呈现正弦或余弦形式,并且从频谱可以看出呼吸和心跳信号频谱中的最大值即为呼吸和心跳的频率。

图5 呼吸和心跳信号相位波形及其频谱
(3)呼吸频率与心跳频率的性能对比。
为了验证方法的准确性和有效性,使用雷达传感器分别采集5个成年男性和5个成年女性5 min的心跳和呼吸数据,利用本文方法计算呼吸频率和心跳频率,并与呼吸传感器采集的呼吸频率和智能手环采集的心跳频率数据进行比较。对采集到的数据取1 min的数据长度分别进行处理,然后采用IIR带通滤波器进行滤波,寻找幅值最大的频率,得到呼吸频率和心跳频率,详见表1。表1中采用皮尔逊相关系数(Pearson correlation coefficient,PCC)进行性能比较[14],其中PCC取值范围为0~100%,0表示两者不相关,100%表示两者完全相关。
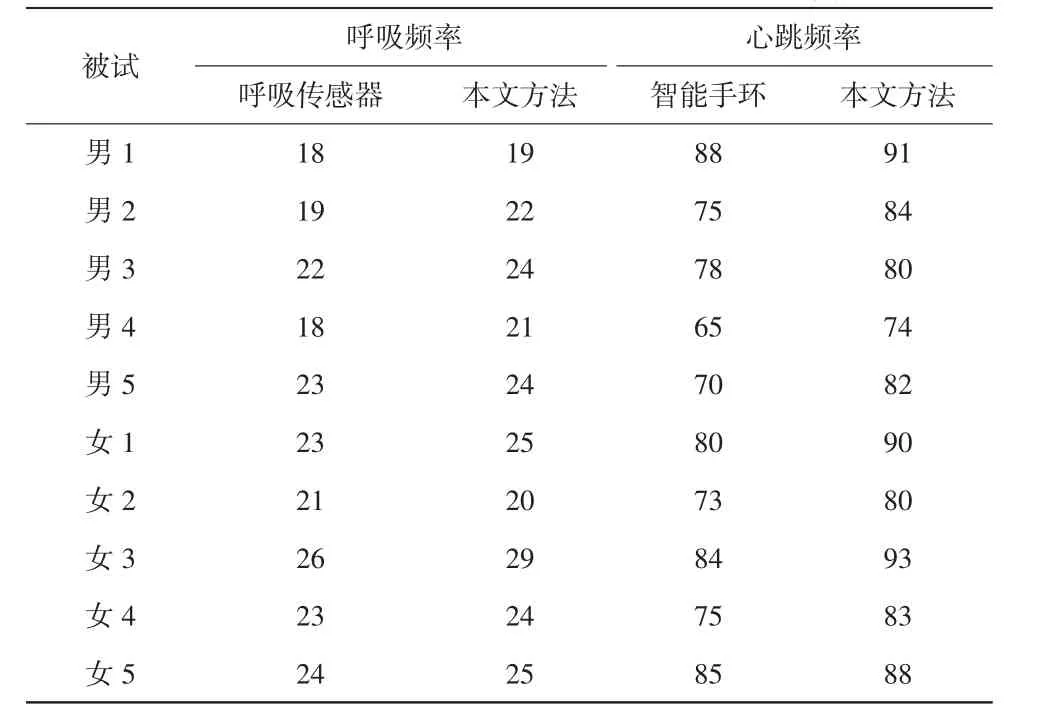
表1 本文方法与接触式设备采集的呼吸频率和心跳频率对比单位:次/min
由表1可知,采用本文方法得到的呼吸频率与呼吸传感器得到的结果非常接近,并且本文方法得到的心跳频率与智能手环结果也很接近。本文所提方法采集的呼吸频率与呼吸传感器的匹配率(即PCC值)达90%,心跳频率与智能手环的匹配率(即PCC值)达88%。由于本文采用FMCW毫米波雷达实现非接触式的呼吸和心跳检测,能够在不接触身体的情况下完成对不适宜接触式测量设备等人群的呼吸频率和心跳频率测量,且与接触式生命信号测量方式的匹配率非常高。因此,本文的研究可以为非接触式人体生命信号检测提供有意义的借鉴。
4 结语
本文采用FMCW毫米波雷达通过提取人体所在位置处的回波信号相位信息,经过DACM相位展开后,再利用分段线性插值方法去除椒盐噪声,最后通过IIR带通滤波器分离得到呼吸与心跳信号。实验结果表明,本文所提方法能够有效地抑制噪声和谐波干扰影响,并且采用本文方法得到的呼吸频率和心跳频率与接触式方法的匹配率非常高,从而证明了FMCW毫米波雷达在非接触式生命体征监测中的可行性和有效性。在人体晃动较大或处于运动状态时,生命信号被完全掩盖,本文所提方法难以检测出呼吸和心跳信号。为扩展非接触式人体生命信号检测的应用范围,下一步工作将研究人体运动状态下的生命信号检测。同时,还可以将本文提出的分段线性插值噪声去除方法与经验模态分解、小波变换、盲源分离等方法相结合,进一步提升生命信号检测的准确率。
