3-RPS并联稳定平台机构设计及运动学仿真分析
2021-11-27赵万卓谢英江孙景工孟令帅
赵万卓,谢英江,孙景工,孟令帅,牛 福
(军事科学院系统工程研究院,北京 100166)
0 引言
越野救护车和医院船在复杂路况下行驶,地面激励会间接作用于人体和设备[1]。低频大幅度的激励作用于人体,会降低伤病员舒适性,加剧病情,影响车内实施的急救工作;作用于设备时,会影响设备的精准性,严重时可能会使设备损坏。现有的车载隔振控制系统大多数是采用被动隔振,不能进行低频率的大幅度主动隔振调节,而采用主动控制的稳定平台可以有效补偿大振幅低频运动[2]。
并联机构由于其承载能力大、无任何累积运动误差、响应快速[3-4]等优点,越来越广泛地被应用于飞行器姿态模拟、雷达轨迹跟踪、扰动隔离等方面。扰动隔离是并联机构应用的重要方面之一,针对车辆或舰船[5]运动过程中存在的大振幅低频运动,通过对并联机构的位姿控制[6],能改善载具摇晃时人员的乘坐舒适性,或保护精密设备的内部机构不会因摇晃而损坏。
3-RPS机构由Hunt[7]提出,可实现沿Z轴的平动和绕X、Y轴的转动。蔡月[8]基于3-RPS并联机构设计了一种能够为医疗车担架提供良好稳定性的医疗车稳定平台,该平台占用体积为0.31m3。许猛等[9]设计了3-UPS型船载稳定平台以隔离船舶运动对船载设备的影响,采用液压驱动,平台占用体积达9.9 m3。张峰等[10]设计了一种3-RPS并联稳定平台以避免舰船运动对摄像系统的工作造成影响,平台占用体积为0.27 m3。Iqbal等[11]基于二自由度并联机构用鲁棒控制方法改善了海上稳定平台的变载荷问题。上述稳定平台的应用场景较为单一,只适用于车载或船载其中一种场景。本文基于3-RPS机构设计适用于更多应用场景的并联稳定平台,其体积较小,可作为座椅用于车辆或船只上轻伤患者的运输,也可作为搭载设备的放置平台以保证设备的良好工作状态。
1 3-RPS并联稳定平台运动学模型
1.1 自由度分析
3-RPS属于闭环空间结构,采用修正的G-K公式[12]计算自由度:

式中,M为机构的自由度;d为机构在空间运动的阶数;n为机构的总构件数;g为机构的运动副数量;fi为第i个运动副的相对自由度;v为并联冗余约束。
3-RPS机构由上平台、下平台、3条RPS支链组成,每条RPS支链由球铰副、移动副、旋转副组成,空间运动阶数d为6,总构件数n为8,运动副总数g为9,并联冗余约束v不存在,忽略此项。将上述参数带入公式(1)中计算,3-RPS机构具有3个方向的自由度,即2个旋转自由度、1个平移自动度。
1.2 位置反解
建立3-RPS并联稳定平台的运动学模型,在给定上平台姿态、角速度时,可以通过坐标变换等计算获得3-RPS并联稳定平台各支链的位移和速度[13-14]。对3-RPS并联稳定平台的上、下平台分别建立坐标系 OS-xyz、OP-XYZ,A1、A2、A3分别为球副与上平台的铰点,坐标系OS-xyz的原点OS位于三角形A1A2A3的中心,r为原点OS到三角形A1A2A3顶点的距离,x轴与OSA1重合、y轴与A2A3平行、z轴与上平台垂直;P1、P2、P3是移动副;B1、B2、B3分别为转动副与下平台的铰点,坐标系OP-XYZ的原点OP位于三角形B1B2B3的中心,R为原点OP到三角形B1B2B3顶点的距离。X轴与OPB1重合,Y轴与B2B3平行,Z轴与下平台垂直,如图1所示。

图1 3-RPS并联稳定平台运动学模型

2 机构设计
在复杂路面行驶的车辆,由于路况干扰产生的最大俯仰角能到达20°左右,在5级海况下的中小型船舶横纵摇幅值可达 8°~20°[15],因此设计的 3-RPS并联稳定平台转动调节范围不小于20°,升降调节范围不小于50 mm。为了满足车辆或船只上轻伤患者的运输和搭载设备良好工作的需要,通过蒙特卡罗法分析不同的机构参数对应的工作空间[16-17],最终设计的机构参数如下:下平台半径RP为260 mm,上平台半径RS为210 mm,支链初始长度L0为550 mm,电动缸行程d为140 mm,球副的最大转角φm为30°。下平台3个转动副的铰点均以120°的圆心角均匀分布在直径为195 mm的圆周上。上平台上3个球副的铰点均以120°的圆心角均匀分布在直径为195 mm的圆周上,根据设计的3-RPS并联稳定平台机构参数,在Solid Works中建立模型,如图2所示。支链的执行器由电动缸组成,平台体积为0.15 m3左右,相对目前大多数并联稳定平台占用空间更小,能用于小空间内的稳定调节。

图2 3-RPS并联稳定平台Solid Works模型
根据并联稳定平台的机构参数,用蒙特卡罗法[18-19]求解得到的3-RPS并联稳定平台工作空间如图3所示。由图3可知,上平台在Z轴的单自由度运动最大区间为550~690 mm,随着上平台沿Z轴平动,绕X、Y轴的最大转动角度逐渐减小。上平台在初始位置附近时,绕X、Y轴的最大转动角度均超过20°,满足给定场景的工作需要。
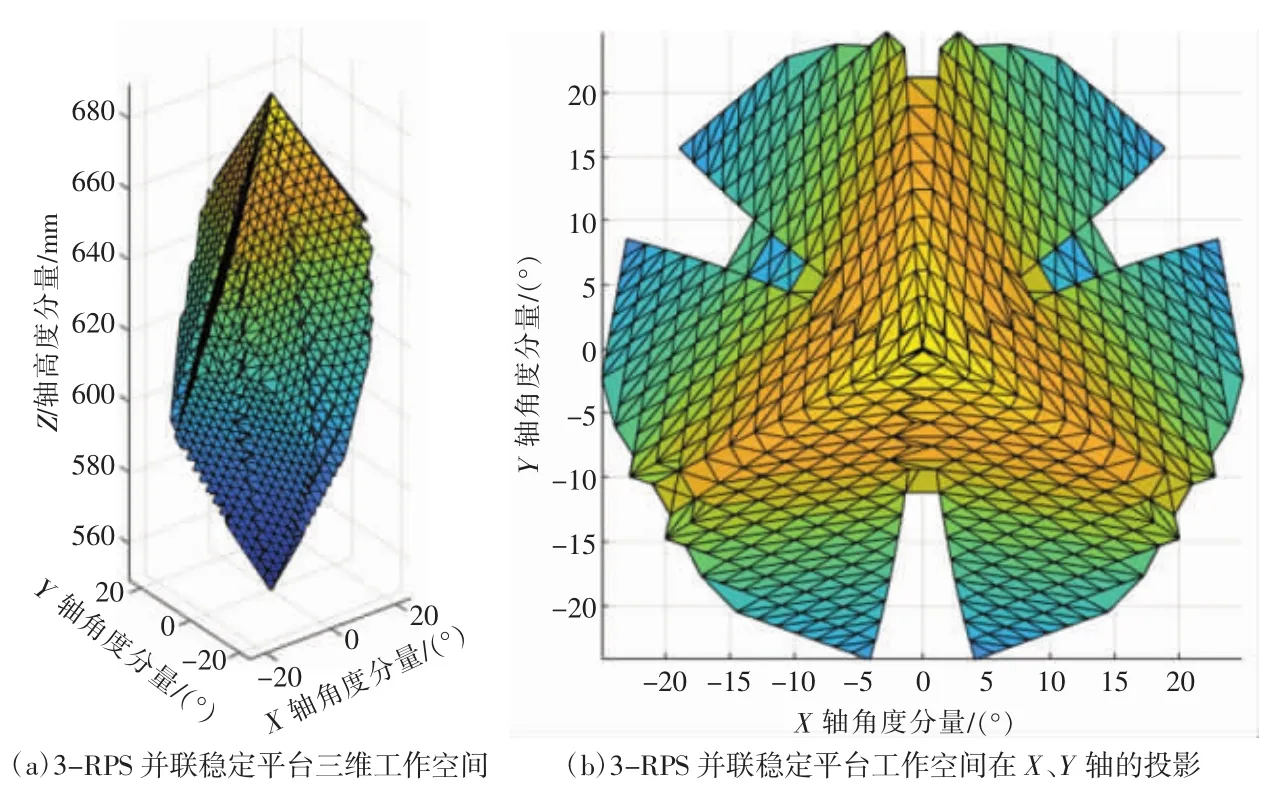
图3 3-RPS并联稳定平台工作空间
3 运动学仿真与分析
当载具在高低起伏的路况下行驶时,位于3-RPS并联稳定平台下平台的姿态传感器检测到姿态角变化量,根据姿态角的变化量,控制器发出控制信号,驱动电动缸调节长度,上平台相对下平台进行相反的姿态角变化,从而补偿来自下平台的扰动,使上平台达到稳定状态。将3-RPS并联稳定平台的模型简化,在Simulink/Multibody工具箱中搭建3-RPS并联稳定平台的简化物理模型,如图4所示,省略球副、转动副等,只保留相应的约束条件。设计如图5所示的物理模型及运动学建模验证方案,期望姿态经过运动学反解模块计算输出支链的期望长度,3-RPS并联稳定平台物理模型的电动缸以期望长度为输入信号执行运动,测量模块测量3-RPS并联稳定平台物理模型的实际姿态,最后通过对比期望姿态和实际姿态完成对3-RPS并联稳定平台物理模型及运动学建模的仿真验证。
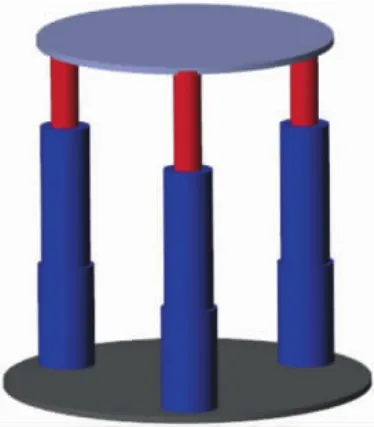
图4 3-RPS并联稳定平台的简化物理模型
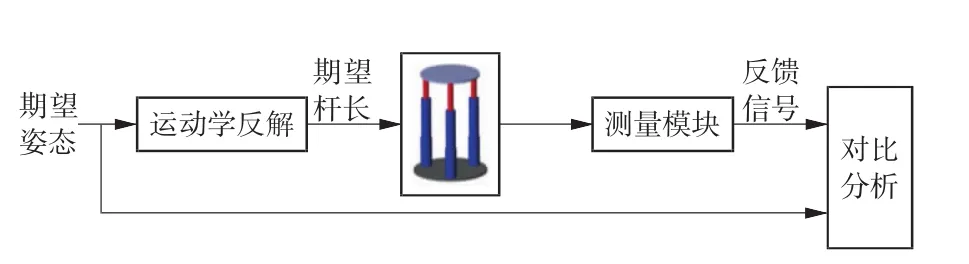
图5 物理模型及运动学建模验证方案

图6 俯仰和翻滚运动的期望姿态、实际姿态与运动误差曲线
当3-RPS并联稳定平台在俯仰±20°和翻滚±20°的额定最大稳定调节位置工作时,3条支链的电动缸位移曲线如图7所示。从图7可以看出,当3-RPS并联稳定平台处于额定最大稳定调节位置时,电动缸伸缩量在最大行程内,电动缸行程参数满足设计要求,且电动缸位移曲线连续平稳,没有突变,说明3-RPS并联稳定平台机构参数设计合理,运动学性能良好,满足工作空间的稳定控制需求。

图7 额定最大稳定调节位置电动缸位移曲线
4 结语
本文对3-RPS并联稳定平台进行了机构设计,通过蒙特卡罗法分析工作空间,所设计的3-RPS并联稳定平台单自由度转角能达到20°以上,垂直位移能达到70 mm,可满足工作需要。利用Simulink/Multibody对平台物理模型及其运动学进行仿真分析,结果表明运动过程中电动缸位移曲线连续平稳,参数设计合理,能为该机构的实际应用提供参考。考虑到实际中的3-RPS并联稳定平台涉及到传感器、控制器、执行器的安装,这些构件可能对平台的运动性能造成影响,因此本文的研究结果有一定的局限性,可就如何安装这些构件以保证3-RPS并联稳定平台的性能最佳作进一步探讨。
