基于霍尔传感器的图书管理助手机器人定位技术应用研究
2021-11-26王海波蒋羽鑫
王海波 蒋羽鑫
(1.吉林化工学院机电工程学院,吉林 吉林 132022 ;2.吉林化工学院图书馆,吉林 吉林 132022)
1 前言
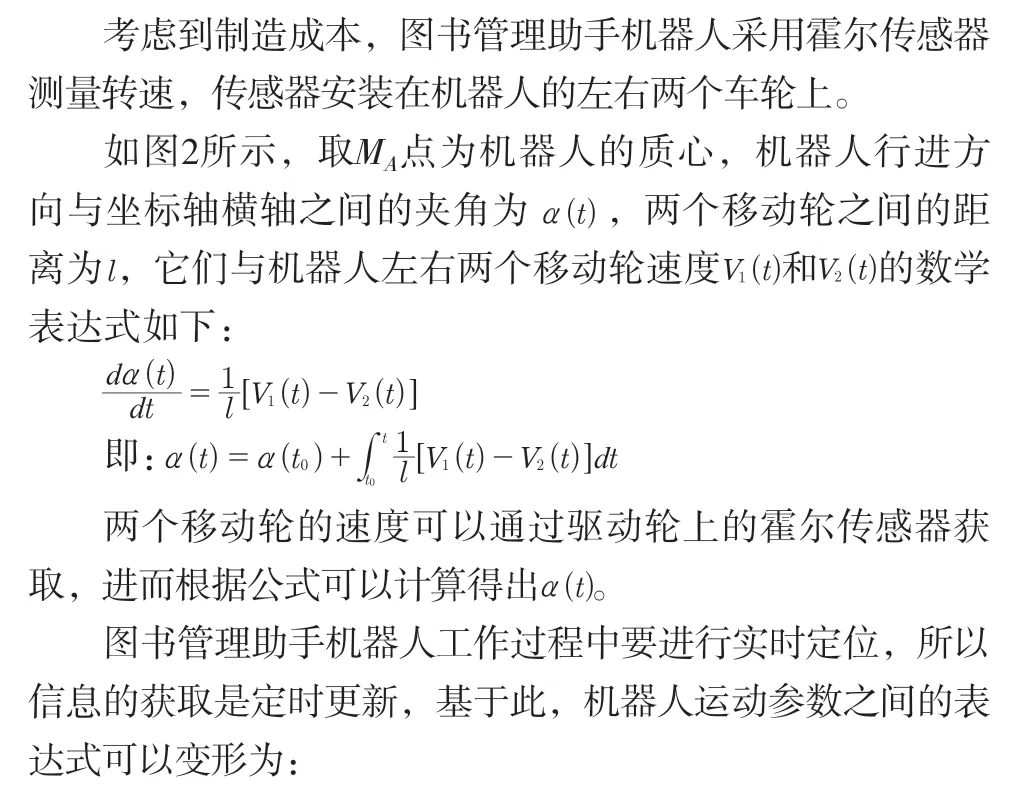
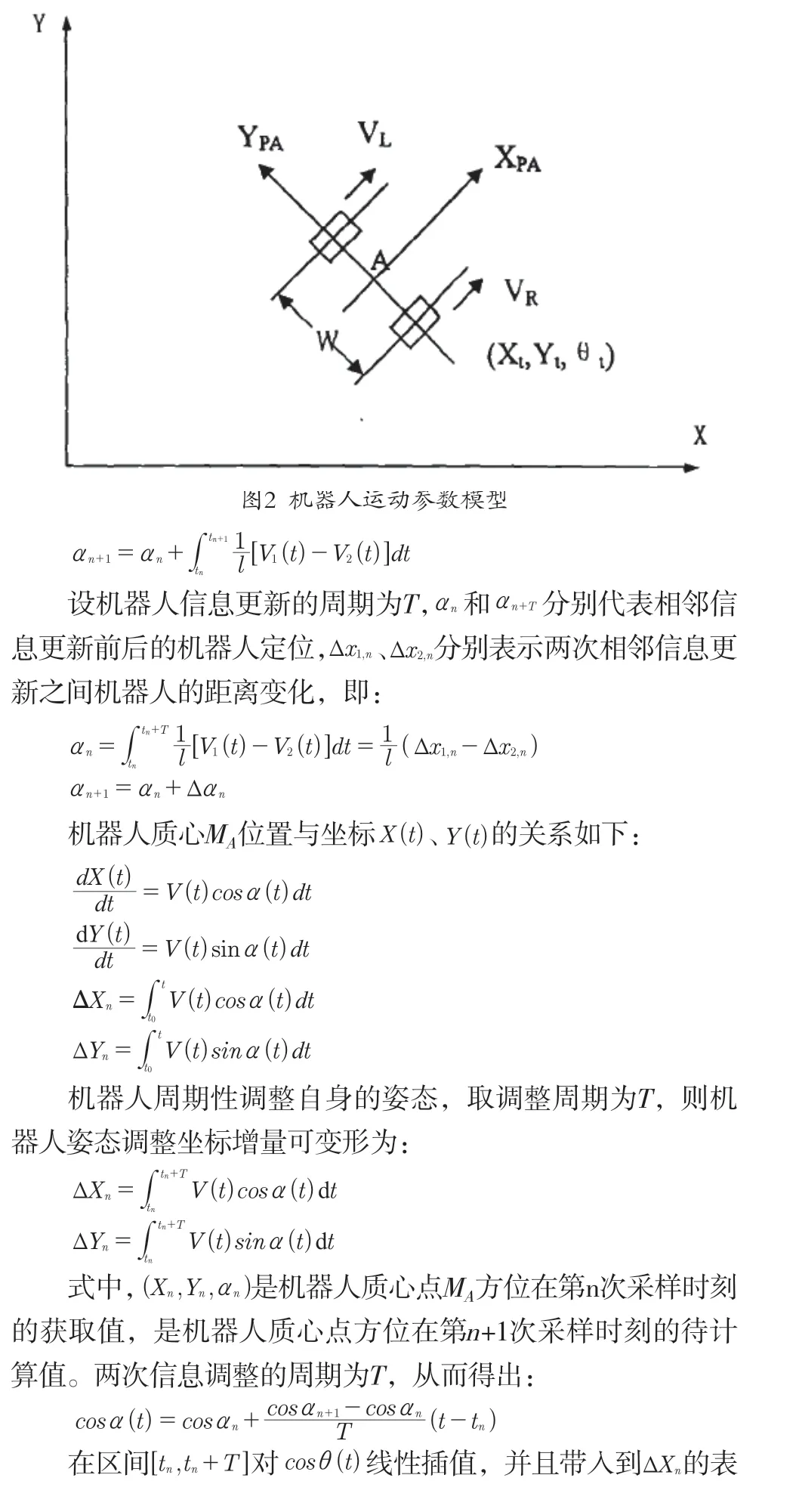
2 图书管理机器人定位算法

3 图书管理助手机器人导航方法
图书管理助手机器人在图书馆已知环境中自主地创建地图,并根据霍尔传感器检测到的信息及相应的算法来实现导航[6-9]。机器人导航定位框图如图3所示,框图中,机器人从工作出发点开始,首先根据工作环境条件进行分析,建立拓扑地图(如图4所示),然后根据拓扑地图和自身位置,按照相应的算法进行本体定位。定位过程中,机器人根据霍尔传感器实时发送来的信息,按照前文论述的定位算法进行计算,不断得出在目前位置下的下一时刻运动参数的调整,以便不断调整位姿,根据自身位置和目的地进行路径规划。机器人在行进过程中,按照定位算法实时更新自身位置,不断进行路径规划,以接近目标,然后完成相应的任务。图书管理助手机器人导航过程中的拓扑地图的建立是正常工作的基础,由于图书馆的房间结构已知,所以可以把图书馆房间的一些特征点简化为节点,作为拓扑地图的关键点,然后根据这些点来得出相应的运动轨迹。定位方案中采用相对定位和绝对定位的算法来实现,最终机器人可以实现自主定位来完成相应工作。
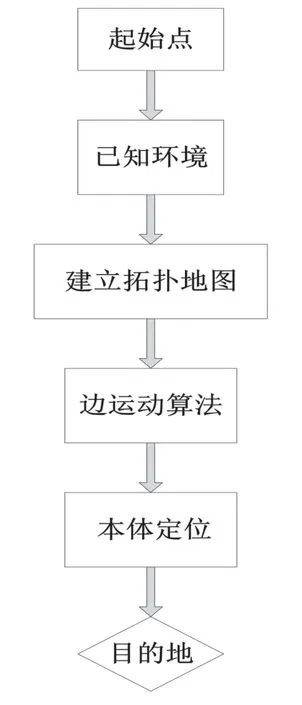
图3 机器人定位导航框图
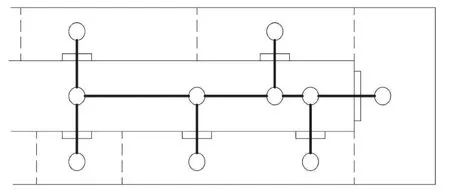
图4 图书馆房间拓扑地图
图书管理助手机器人本体定位方法如图5所示[10-13]。定位过程中,需要在工作场所建立相应的定位栅格,定位栅格上布设有机器人能够识别的标识,采用相对与绝对相结合(相对定位采用航位推算法,绝对定位采用RFID路标定位法)来实现自主定位,这样可以引导机器人进行工作避障。
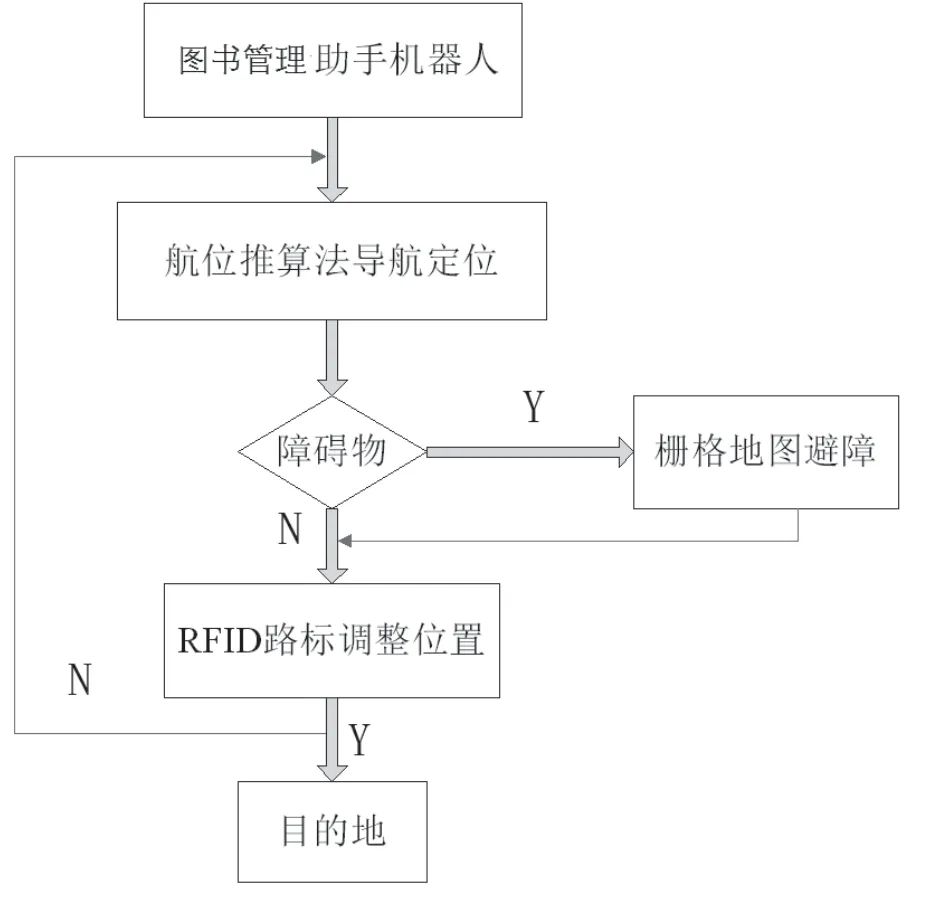
图5 本体定位方法
机器人避障过程中,需要采用超声波传感器来进行辅助,实际应用的超声波传感器分两种,一种是收发一体式,另外一种是收发分离式。其中,收发分离式由于探头结构声绝缘好,发射角小,发射距离远,目前来说应用较普遍。本机器人选用的收发分离式超声波传感器型号如图6所示。

图6 收发分离式传感器
4 实验研究
依据本文所论述的霍尔传感器定位技术搭建了图书管理助手机器人实验系统。实验中,机器人需要到四个房间中进行工作,并且在楼道中设置了一个障碍物,布置了栅格地图,初始位置距离障碍物15 m。机器人出发后,能够按照预定的路线行进,避开障碍物,到达预定房间,完成工作。实验结果表明,图书管理助手机器人基于霍尔传感器的定位技术达到了预定的技术要求。
5 结论
本文通过对图书管理助手机器人导航特性的研究,分析了实时定位导航算法。得到了机器人工作过程中实时避障技术,实验表明,机器人可以利用这些技术完成预定的工作。
