基于AMEsim角位置液压闭环控制系统研究
2021-11-25赵吉蛟王野牧
赵吉蛟,王野牧
(沈阳工业大学 机械工程学院,沈阳 110870)
0 引言
在风洞实验中,攻角的重要位置控制是整个液压系统完成攻角动作功能的关键部分[1]。它控制液压马达的扭转,按照体系给定的位置来实现马达的扭转,从而驱动攻角的转变。而其突出的设计要求是不仅要保证马达旋转角度实现系统给定位置的独立精确控制,而且要保证定位精度±3′和每次角度变化间隔300 ms并且不能超调,还有每次角度变化的停顿时间10 s用来测得需要的实验参数。
1 攻角位置液压系统工作原理
图1为攻角位置控制液压原理图,该系统的组成主要是角位移传感器、伺服阀、液压马达和溢流阀等[2]。输出位置信号由D/A模块转换,传输到阀放大控制。伺服阀作为控制元件,通过改变阀芯的开度大小位移,来控制各个系统的流量,实现位置控制,保证液压马达的正常工作。定量泵作为动力输出装置,提供系统的运作保障[3]。

图1 攻角位置控制系统液压原理图
整个系统动作简述:液压系统提供稳定压力油源,上位机发送设定旋转角度指令,控制系统通过控制器控制电液伺服阀开口量,通过伺服阀开口控制液压马达旋转速度和定位。控制系统将角度位置值反馈到上位机。
由伺服阀与角位移传感器及工控机构成闭环位置系统。对于液压位置闭环控制系统来说,角位移传感器与伺服比例阀构成独立的位置闭环控制系统,满足位置控制要求。马达到达位置后自动形成定位控制,此时伺服比例阀的输入信号不再增大且保持不变。在满足位置控制精度的条件下,拟采用计算机控制方式实现系统的独立控制,不仅使用方便,而且也易于满足位置控制的精度要求。工控机向伺服阀放大器发送角位置信号,确保马达运行。在液压马达运行过程当中,由工控机的一整套系统随时检测液压马达的动态位置。当液压马达由于某种原因而处于不同位置时,系统将该信号作为新的控制信号进行处理。经过控制伺服阀的开口的幅度和大小,来控制液压马达的旋转角度[4]。当满足实验技术要求时,系统建立了一个新的平衡点,其参数不变,趋于稳定。
2 数学模型建立及稳定性分析
模型体系的传递函数成立的依据是3个基本方程:阀的流量方程、马达流量连续性方程与马达与负载的力均衡方程。上述3个方程的3个拉普拉斯转化可以基本形容液压马达的动态特性[5]。3个基本方程的拉氏变换式如下:

传递函数是线性模型,有利于分析稳定性。线性模型分析稳定性,对我们改善控制系统有很高的指导意义,比如改善某些参数会提升性能,改变固有频率,改变阻尼比增大放大倍数、提高系统压力等,在线性模型看得更准。真正工作的时候,通过AMEsim软件进行动态特性分析和精度分析,可以更进一步考虑它的真实模型,把非线性因素考虑进去,建立动态特性模型。接下来就是把建立的所有数学模型按照实验参数进行系统的计算,计算位置控制系统各环节数学模型的参数,对所得各参数量进行赋值,得到位置控制系统的BODE图,如图2所示,能够判别该模型是稳定的。
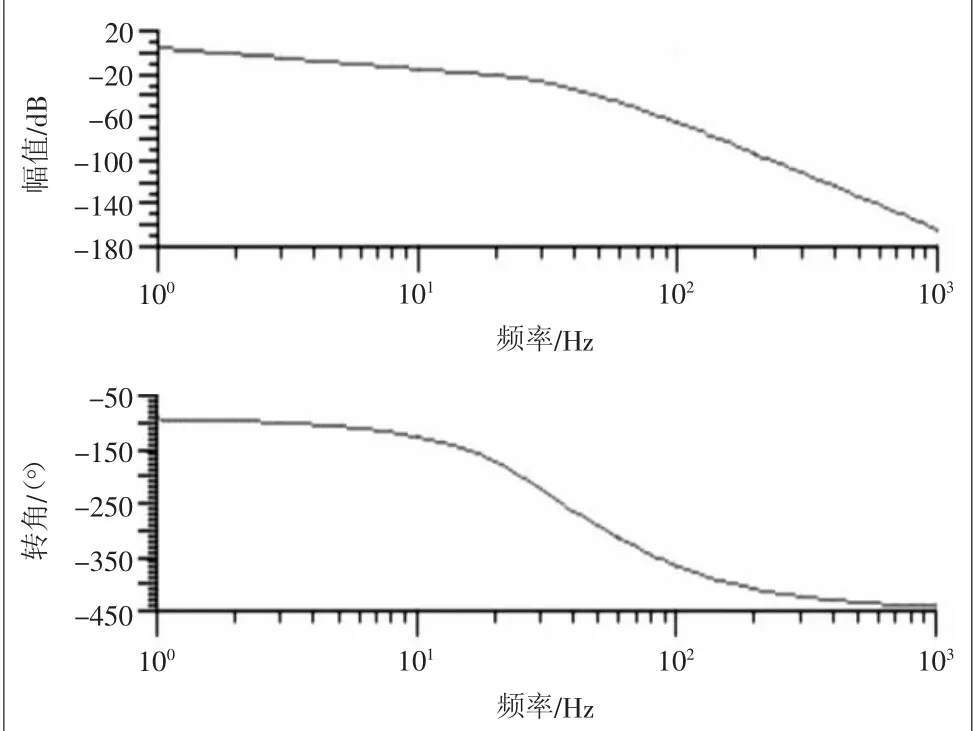
图2 位置控制BODE图
3 位置控制系统的AMESim模型的建立和仿真
3.1 建立伺服阀仿真模型
如图3所示,通过设置和调整参数建立阀体模型,根据实际伺服阀的样品, 使模型的技术指标非常接近真正的伺服阀,其动态和静态特征与样品是一致的[6]。

图3 伺服阀仿真模型
3.2 位置控制系统模型建立
控制系统仿真模型如图4所示,此系统作为仿真的重中之重,各环节的参数设定尤为重要,适当运用批处理功能,进行多个参数的对比,选出最适合的控制参数,且要考虑能源消耗的问题,进而采用此模型进行仿真,是本次研究的主要问题。
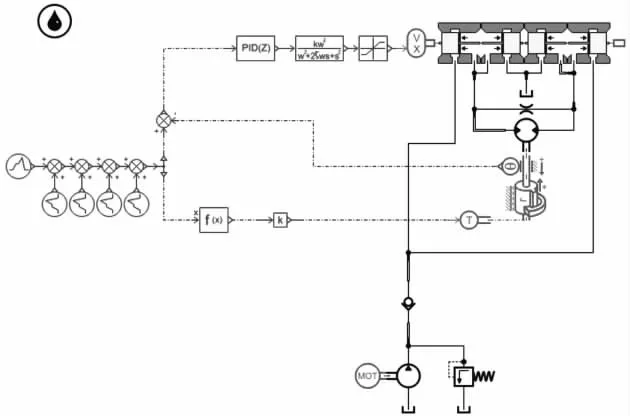
图4 液压位置控制系统仿真模型
3.3 控制系统的仿真
根据系统输入信号,使用叠加信号,要考虑实际中的情况,因此后续的仿真工作需要串联一个惯性环节控制液压马达的输出。当系统输入输入信号时,在两种情况下进行尝试,分别是有无负载时的液压马达的转角,仿真图如图5和图6所示。

图5 无负载情况下马达轴的转角仿真图形
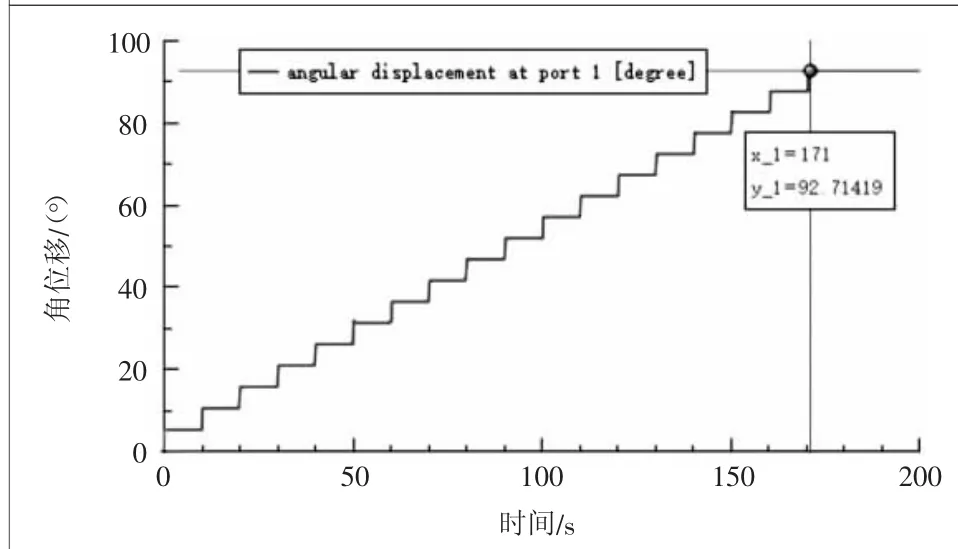
图6 有负载情况下马达轴的转角仿真图形
从以上有无负载转角图可以看出,无负载情况下马达轴的转角按照给定位置旋转,而有负载条件下偏差角度为2°,在模型加入PID之后,有无负载对比下可以看出误差满足条件,本文中只列举实验主要的仿真工作,后续还会在系统中加入蓄能器、滞环等等,并且分别运用批处理来对比不同参数下的结果,再进行深入研究。
4 结论
本文通过建立攻角位置闭环液压控制系统AMEsim模型,分析了有无负载情况下的马达转角和马达负载的曲线图,输入信号还要根据实际情况进行合理选择,在控制系统中加入PID校正可以提升系统的响应速度和控制精度,采用试凑法的PID控制参数,可以达到定位精度,实验没有理想状态,在保证稳定性和正确性的前提下,尽量减少系统发热,节约能源。
