3D打印微型机器人技术研究
2021-11-25魏天琪郑雄胜
魏天琪,郑雄胜
(浙江海洋大学,浙江 舟山 316022)
0 引言
3D打印技术(3D Printing Technology)是一种通过连续地叠加物理层,逐层增加材料的方法来将计算机辅助和设计的虚拟3D模型转化为3D有形物理结构的技术[1]。与传统去除材料的加工技术不同,因此也称其为添材制造技术。随着制造领域和包装领域的蓬勃发展,传统的方法已经不能满足新产品的快速发展需求,而3D打印技术的出现使得制造和包装领域从传统手工方法到智能制造与包装的巨大转变。由于3D打印具有较高的重现度、自动化程度、更大的灵活性,在产品研发过程中,能够有效地建立和修正3D模型,可以避免后期繁琐的修正。因此3D打印技术在食品加工工业[2]、生物医疗行业[3]、航天工业[4]、汽车工业[5]及建筑工业[6]等领域得到了广泛的应用。
微型机器人是一种最大尺寸为微米级别的人造机器,是一个在众多领域备受关注的新兴研究。3D打印微型机器人技术能够集成微型机器人技术和3D打印技术的优点,在近些年迅速地推进新兴的人工智能制造微机械应用领域的研究发展[7-10]。以往关于机器人3D打印的综述主要是集中在大尺寸的3D打印上[11-13],目前在微型机器人的3D打印综述还比较少,因此本文仔细地整理研究出3D打印技术的种类,在此基础上讨论了微型机器人的3D打印材料,并探讨了3D打印智能制造微型机器人在生物医学等领域的应用前景及未来发展趋势。
1 3D打印技术的种类
根据美国材料试验标准F2792[14],按特定的应用场景将3D打印技术化分为7类,其中包括黏合剂喷射、定向能量沉积、材料挤压、材料喷射、粉末床熔化、薄片层压和还原光聚合。
1)黏合剂喷射。黏合剂喷射是一种通过喷射黏合剂使粉末成型的增材制造技术。可用于高分子材料、金属、陶瓷材料的制造,将黏合剂去除并实现粉末颗粒之间的融合与连接,从而得到有一定密度与强度的成品。
2)定向能量沉积。定向能量沉积是一种复杂的印刷工艺,通常用于修复现有部件或向其添加额外材料。定向能量沉积对晶粒结构有高度的控制,能产生高质量的物体。在这种工艺中,注入打印头的金属粉末可以在输出过程中被连续改变。因此,它能够制造出传统方法无法完成的特殊物体。
3)材料挤压。可用于打印塑料、食品或活细胞的多种材料和多色打印。该工艺已得到广泛应用,成本非常低。此外,这个过程可以构建产品的全功能部分。例如,熔融沉积成型(FDM)可以通过加热和挤压热塑性长丝,从下到上逐层制造零件。
4)材料喷射。材料喷射是一种相对较新的最快、最精确的3D打印技术之一,主要使用喷射出液体光聚合物液滴,液体光聚合物液滴在紫外光的照射下固化,由此制造零件。因为光聚合物树脂在固化之前以液滴喷射,所以通常被比作2D喷墨工艺。
5)粉末床熔化。包括电子束熔化、选择性激光烧结和选择性热烧结技术。该方法使用电子束或激光将材料粉末熔化或熔合在一起。在这个过程中使用的材料有金属、陶瓷、聚合物、复合材料和混合材料。基于粉末床熔化的选择性激光烧结技术可用于制造金属、塑料和陶瓷制品。
6)薄片层压。该方法是将薄片材料黏合在一起形成物体的一部分。这种工艺的优点是片材层压可以做全色印刷,它相对便宜,材料处理容易,多余的材料可以回收利用。层压制品制造能够以较低的制造成本和较少的操作时间制造复杂的几何零件。
7)还原光聚合。还原光聚合通常指的是通过使用激光、光或者紫外线固化光反应性聚合物。使用光聚合的3D打印技术有光固化立体成型技术(SLA)和数字光处理(DLP)等。光聚合适用于制造具有良好细节和高表面质量的优质产品。
现如今,3D打印技术已经不再仅仅局限于原型的制造,而是越来越多地用于产品设计制造的各个环节,尤其是在智能制造领域中,3D打印技术占有越来越重要的地位。
2 微型机器人的3D打印材料
由于3D打印技术很难使精度达到微米级别,阻碍了微机械、微光学、微电子学、生物医学材料打印等领域的普遍应用。而三维激光打印的出现突破了传统光学的特性,对高精度和空间分辨率需求的3D打印技术产生了创新性的影响。因此,本文主要针对基于激光的3D打印材料进行详细研究,其中包括SU-8光刻胶、IP系列光刻胶和光交联水凝胶等。
2.1 SU-8光刻胶
SU-8光刻胶是一种负环氧型的光刻胶,在3D微制造中是最常用的材料之一,尤其是用于微型机器人。SU-8的名字来源于“SU”,表示为“由UV构成”,而“8”表示平均有8个环氧基[15],如图1所示。SU-8光刻胶具有高光学透明性、低成本及加工时间短、制造方便等优点,是一种广泛应用于生物医学微机器人的结构材料。例如基于SU-8光刻胶,Vizsnyiczai等[16]研究了一种细菌驱动的光控3D微电动机,用于有针对性的药物输送。Li等[17]开发出一种带锯齿状尾翼推进接口的微型游泳机器人,可以快速地对大型货物进行定向运输。李杰等[18]介绍了一种采用毛刺状的多孔球形结构的磁性微型机器人,可以在体内有针对性地携带和运送靶细胞。Das等[19]设计了一个微型机器人平台,可以将生物细胞间的信号分子按需传递,并且能够对基因进行调控。此外,含SU-8光刻胶和11 nm的Fe3O4纳米粒子的磁性聚合物纳米复合材料还可以在单细胞中按需定向给药等[20-21]。
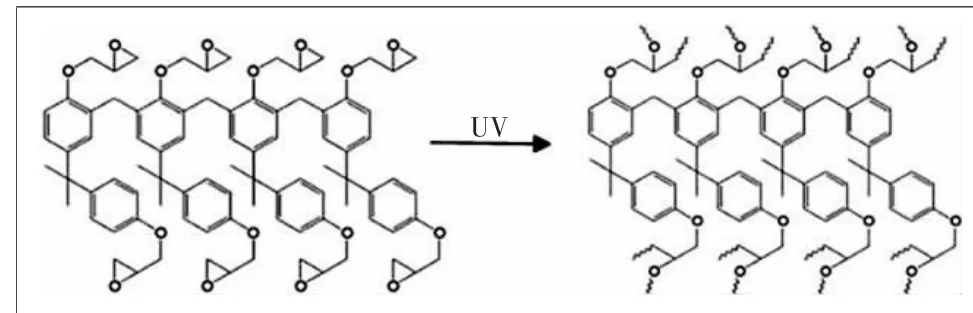
图1 SU-8中的环氧基团是在紫外光(UV)照射下的聚合反应[15]
2.2 IP系列光刻胶
IP系列光刻胶是一种标准的光聚合材料,具有高形状精度、高分辨率、易于操作等优异性能,已被广泛应用于制作功能性微光学器件和生物医学微器件(如3D微夹持器[22])。如图2所示,IP系列光刻胶主要有IP-L光刻胶、IP-S光刻胶、IP Dip光刻胶、IP-G光刻胶及IP-Q光刻胶、IP Visio光刻胶等。使用IP系列光刻胶的3D打印微型机器人设备拥有很多潜在的应用,例如Wang等[23]设计了一种磁性螺旋微型机器人,可以用于单细胞的定位及货物运输的控制。Ren等[24]介绍了一种基于声学气泡的微游泳器,能够自由地在3D范围内运动,并且能够选择性地运输单粒子。Yasa等[25]在考虑优化运动性能和免疫性能的结构的情况下,开发了一种用于靶向免疫治疗和免疫调节的磁微游泳器。Xu[26]提出了一种结合磁驱动微电动机与合成蛋白质的透明质酸微片的集成系统,用于精细胞的定向捕获、运输和释放。此外,Adam[27]阐述了微型机器人应用的辅助技术,介绍了先进的微机器人技术的跟踪成像功能。
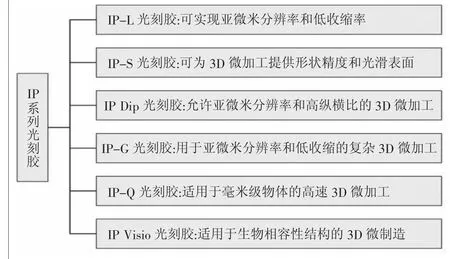
图2 IP系列光刻胶类别
2.3 光交联水凝胶
光交联水凝胶是一种能够通过暴露在光中以时空方式操作的具有高水化度和交联能力的一种材料,常用于实现各种生物医疗应用所需的功能。例如文献[28],它们可以模仿细胞外基质对细胞的功能进行调节。在文献[29]中,它们能够通过调整物理、化学及生物的特性来达到预期的目的。此外,光交联水凝胶在废水污染物(包括重金属、营养素及有毒染料等)的去除上也表现出优异的性能[30]。光交联水凝胶主要有3种,分别是明胶甲基丙烯酰(GelMA)、甲基丙烯酸透明质酸(MEHA)和聚乙二醇二丙烯酸酯(PEGDA)。其中GelMA水凝胶已经应用于开发各种3D仿生体外健康和疾病组织模型[31];MEHA水凝胶也在癌症治疗的药物传递中得到了应用[32];而PEGDA水凝胶也已经成功应用于软骨组织工程[33],用来对软骨关节的动、静态力学特性进行模拟。
3 3D打印微型机器人的研究现状
3.1 生物医学微型机器人
医工交叉是一个新兴的跨学科研究领域,通过结合3D打印技术的优点,可以以更小的结构及更复杂的功能智能制造出生物医疗微型机器人,使其能够在复杂的人类生理环境中完成特定的任务。因此3D打印微型机器人在生物医疗领域能够更好地服务于人类,具有巨大的研究价值。
在生物医学的治疗方面上,Bozuyuk等[34]提出了一种磁驱动的双螺旋微型游泳器,该游泳器可以使用外部光刺激,然后按需主动地释放化疗药物。首先,采用3D打印技术制备出壳聚糖磁性聚合物的纳米复合材料,然后将阿霉素视为光可裂解的连接剂,用以修饰微粒子上的氨基,最后将壳聚糖赋予微型游泳器生物相容性和生物降解性,从而用于生物设置。该方法结合了光触发给药与磁动力微游泳器迁移率,满足了医疗任务的高精度和高效率,这使得微系统有望应对与治疗各种疾病的药物的主动和控制传递相关的挑战。Barbot等[35]展示了一种用于直径为140~830 μm的纤维功能化微型机器人平台,在此基础上开发出2个用于校准光纤上的浮动电子电路的2 mm×3 mm×200 μm的微型机器人。该微型机器人的位置和方向可以通过永磁体在空气或者水界面得到控制,其中磁铁的非均匀磁场与微型机器人中记录的不同优先磁化方向有关,从而使得2个微型机器人之间的距离可以精确控制。通过实验,成功地验证了这种控制模型的性能。Hwang等[36]展示了一种精确、高效并且可控杀死、降解及去除生物膜的催化抗菌微型机器人。该微型机器人能够利用双重催化磁功能的氧化铁纳米粒子产生杀菌自由基和分解生物膜胞外多糖,并且可以通过磁场驱动微型机器人组件去除碎块化的生物膜,从而可以对生物膜感染实施持续治疗,减轻医疗设备的各种表面生物污染。
在生物医学的组织再生方面,Li等[37]研究了一种磁性毛刺状球形的多孔微型机器人,能够将目标细胞通过磁场的驱动下携带并运送到所需的体内位置。首先用制造微型机器人的激光光刻3D打印技术为机器人的结构优化提供了足够的灵活性,接着选择干细胞等不同类型的细胞进行检测,通过将细胞转移到玻璃基底上,用以模拟释放细胞的跨内皮迁移,并且在裸鼠体内释放细胞,证明了所设计的微型机器人具有细胞释放性能。该研究为基于细胞治疗的再生医学提供了一个微型设备平台。Wang等[38]基于无细胞毒性和可生物降解的GelMA水凝胶,设计出一种能够3D打印蛋白质的微型机器人系统的通用方法。该方法可以打印出不同尺寸的微型结构,与以往的刚性微型游泳器对比(刚性微型游泳器的前向速度随着旋转频率的增加急剧下降),GelMA微型游泳器可以随着旋转频率的增加保持相对较高的前向速度值。由于GelMA微型游泳器具有一种生物活性和生物可降解材料的优良性能,使得其能够成为生物医学微型组织再生机器人及微型生物降解机器人的一个重要发展方向。
在生物医学的细胞和药物输送或者释放方面,Medina-Sánchez等[39]研发了一种新型的人工精细胞混合微型电动机。该微型电动机能够运送缺乏运动能力的精细胞,以此来帮助它们完成其自然功能。Ceylan等[40]设计了一种磁动力控制的拥有双螺旋结构的3D微型游泳器,能够用于药物的输送和释放任务。该游泳器是一种水凝胶的、可酶降解的微型游泳器,具有在微环境中病理标记的响应性。Baker等[41]利用双光子光刻技术对微型自推进游泳器中的多行为反应进行纳米级的3D打印,并通过形状自治和多行为反应进行编码。通过理论基础加上实验对比,证明了该游泳器的圆环体中的环面在磁场的作用下,可以不断地在两种主要的游动模式间进行切换,其中:在第一种模式下,微型自推进游泳器会线性地并且平行地游到基片上;在第二种模式下,微型自推进游泳器会定向垂直于基片。可以实现货物的操纵与运输,如将细胞送到特定的地点进行细胞治疗。该3D打印的微型游泳器是第一次由自主的人工游泳器操纵活性物质,对智能细胞运输和治疗的发展留下了深远的影响。Bernasconi等[42]通过对立体平版打印、3D打印及湿法金属化等成本效益高的制造技术的结合,成功地打印出一种圆柱形支架结构。该结构是一种在生物医学领域中能够完成靶细胞递送任务的功能型微型器件,例如通过施加适当的定向旋转磁场来实现对该结构速度与位置的控制,使其成为人体靶向细胞传送的潜在工具。Xu等[43]提出一种能够主动逆着流动的血液游动,并且具有肝素货物输送性能的混合精细胞微型电动机。在该系统里,混合精细胞微型电动机可以进行磁性引导和货物输送。此外,单个精细胞微电动机经过磁化后可以组装成将多个精子或者医疗药物输送的一种载体,用于血液凝块及循环系统中其他疾病的治疗。Wang等[44]基于可动金属-有机框架(MOFs)成功地开发出具有螺旋运动且伴随着生物的相容性和pH响应特性的一种微游泳器。该游泳器能够沿预先设计的轨迹在弱旋转磁场的控制下进行一系列的游动,并且可以由螺旋结构的表面厚度与致密性通过合成条件(包括反应物浓度及反应时间)的变化来进行调整。通过实验,证明这些游泳器能够在细胞培养基中实现单细胞靶向,可以在复杂的微流体通道内跟踪复杂的轨迹,并且有选择性地携带和释放药物,是一种制造集成多功能系统的新方法。
在生物医学的跟踪、成像及微创显微手术方面,Servant等[45]首次对一群磁性螺旋微游泳器采用小于10 mT的外部磁场进行实验研究体内的成像及驱动。这是生物医疗中跟踪和成像的重要里程碑,在合成生物学、辅助受精及药物或基因传递中有着广泛的应用。De等[46]提出了一种克服3D机器人受到传统3D打印技术材料限制的间接3D打印方法。该方法将直接激光写入产生的高分辨率微模型注入到聚合物中,通过溶解得到最终的3D打印微型结构,用于直接打印3D和4D微型机器人。此外,该方法具有制造和驱动填充有磁性纳米粒子的明胶螺旋的多功能性,并且拥有5 μm的最小特征尺寸的形状记忆特性支架状微型结构。该方法能够制造出用于微创手术的微型机器人和手术工具,在未来的生物医疗设备中,为制造出3D和4D打印的微型机器人打下了基础,具有重要的研究价值。
3.2 可编程自组装微型机器人
可编程自组装是一种形状、连通性及灵活性都具有可编程性的自组装模体[47],通过引入可编程自组装技术可以将异构部件集成到具有特定结构、动力学和功能性的3D微型机器人中。在2017年,Vizsnyiczai等[48]利用直接激光3D打印技术制造出一些具有亚微米特征的复合微结构,这些复合微结构可以引导和排列单个细胞形成有序的结构。实验表明,通过3D微型结构和转基因游泳菌的自组装,可以获得快速、低噪声及受光控制的生物合成微电动机。Alapan等[49]提出了一种通过预先编程的结构和电动机单元之间的物理相互作用,并且具有所需配置的动态自组装移动微型机器人。该机器人组件是对单个零件的三维形状编码,通过介电相互作用驱动的。与传统单片微型机器人不同,由磁性和自走式电动机部件组装而成的微型机器人可以表现出可重构的运动模式和附加的转动自由度。试验结果表明,形状编码的装配路径能够实现可编程和可重构的移动微型机器人。该方法为多功能型微型机器人的制造提供了一种有效的解决方案,在微型机器人学、生物医学等领域有着广泛的应用。
3.3 其他功能型微型机器人
2019年,Skylar-Scott等[50]提出一种能够产生与体素有关的多材料、多喷嘴3D(MM3D)打印技术。该方法首先利用压力驱动的屈服应力流体的流动特性,在多种材料之间进行高频无缝切换,从而实现使非均匀体化体素的连续打印成为可能,接着设计出一种能够快速打印具有空间编程、结构及性能组成的三维物体的多材料多喷嘴打印头,最后打印出两个实施例(即可折叠的折纸图案和可移动的微型机器人)突出MM3D的功能,并且可以通过MM3D打印对各种性能的结构、生物材料进行图案化。2021年,Tyagi等[51]设计了一种微型机器人的3D打印技术,目的是为了在微米级中制造出更小尺寸的结构。首先使用定制的挤压式3D打印机,将微执行器尺寸缩小到300 μm×1000 μm,接着在20 μm的最小厚度下,从器件结构的计算机辅助设计模型出发,采用结合打印体和电活性聚合物的微致动器驱动执行器,然后制作并操作了长度从1000~5000 μm不等的微执行器,从而证明3D打印过程的简便性和通用性,最后用3D打印技术打印出由刚体和单独控制的自由移动的手臂或腿组成的微型机器人装置,用来探索微型夹持器、微型机械手及微型机器人的3D打印技术。该方法为使用3D打印微型夹持器、微型机械手和微型机器人的局限性提供了一定的见解。
此外,Bernasconi等[52]将立体光刻3D打印技术与湿法金属保护技术相结合,开发出一种用于水清洗的环境微型机器人。该微型机器人通过使用化学沉积和电解沉积将不同的金属层沉积在3D打印部件上来实现所需的功能。首先利用电解沉积的灵活性和通用性将污染物光降解和杀菌结合在同一装置上,然后在银基体中涂覆含有二氧化钛纳米颗粒的复合纳米涂层,最后添加旋转磁场,成功地实现了环境微型机器人的驱动。从净水效果看,该微型机器人在水污染处理上具有显著的光催化活性,并且对革兰氏阴性菌具有显著的抗菌活性。该方法对未来的人类生存环境具有意义非凡的研究价值。
4 3D打印微型机器人的研究展望
4.1 生物医学微型机器人的展望
目前对于生物医学微型机器人的研究大多数还停滞在临床前试验,包括体外试验和动物体内试验。对于人类体内的医学问题,需要考虑多种因素,其中最重要的是生物医学微型机器人生物可降解性,这就要求3D打印的微型机器人在处理特定的医学任务后,能够在人体内完全降解,降解的产物对人体无害。此外,还需要考虑微型机器人的形状大小、组成材料、驱动方式、控制原理、生物成像及在人体内的部署、体外操作医生等之间的相互作用。医学微型机器人的最终目标是人类体内应用,在未来的研究中,应当深入了解和研究医学微型机器人与上述因素之间的相互作用,可以结合人工智能技术来优化微型机器人的设计,为3D打印医学微型机器人在人体内的实际应用铺平道路。例如在2017年,Colabrese等[53]阐述了强化学习算法在复杂流场中模拟自适应行为的潜力,解决了智能微游泳器导航的难题。2020年,Soto等[54]提出了一种利用机器学习算法快速地对微型机器人的闭环操作数据进行评估的理念,利用机器学习算法可以设计和开发出具有适应环境变化和复杂目标任务的新型智能微型机器人。
4.2 可编程自组装微型机器人的展望
可编程自组装技术可以将信息从单个部件转换为集体整体,使其能够产生复杂的微米或纳米颗粒来处理运动、能量和信息,已经广泛引起了研究人员的关注[55-56]。虽然研究人员在设计3D打印制造微型机器人的过程中,能够根据其灵活性很容易地改变微型机器人的大小和形状等,但也存在着一些与自组装相关的问题,比如残缺、层次结构、相位分离及密度等,造成了不能够将异构部件集成到具有特定结构、动力学和功能性的3D微型机器人中。展望未来,我们需要努力挖掘出可编码自组装在动态、可编码及可重构性与位置选择性等方面开发3D微型机器的潜力,并将模块化微型机器集成到分级3D多尺度系统中去,创造出更复杂的3D微型机器人。
4.3 其他功能型微型机器人的展望
对于每一种功能型微型机器人来说,在执行任务时都会产生大量的数据,将这些大数据收集起来,采用数据分析法能够实时更新数据,从而找到一种更好方式去完成任务。例如,可以借助数据分析及时调整环境微型机器人的运动参数和驱动参数,让微型机器人能够及时地去适应局部环境,从而更好地完成净水任务[52]。
5 结语
3D打印微型机器人技术能够集成3D打印技术和微型机器人技术的优点,在近些年迅速地推进新兴的人工智能制造微机械应用领域的研究发展。本文详细地综述了3D打印微型机器人技术。首先按特定的应用场景整理研究出3D打印技术的种类;接着介绍了微型机器人的3D打印材料,并对基于激光的3D打印材料进行详细研究;然后详细地阐述了国内外3D打印微型机器人在生物医学等领域的应用与研究现状;最后讨论了3D打印微型机器人的研究展望,并对未来的研究方向给出了自己的见解。希望可以在3D打印微型机器人研究方面提供深入的了解和认知,促进智能制造微机械等行业的应用与研究。
