双目避障系统在桥式起重机上的应用
2021-11-25柳文轩阿丽米热阿布来提麦吾兰伊力哈木
刘 曦 柳文轩 阿丽米热·阿布来提 麦吾兰·伊力哈木
(新疆大学机械工程学院,乌鲁木齐 830017)
近年来,各种大型机械层出不穷,虽然为社会的发展带来了便捷,但是随之而来的还有多种安全事故。如何降低大型机械安全事故的发生率成为了当代社会的重要课题。桥式起重机在生活中应用范围较广,如港口、工厂、工地等场所中都会用到桥式起重机[1]。在桥式起重机运行过程中,由于操控者视野范围有限,需要地面的指挥人员实时观察并向操控者反映运行状况,若是配合不当或操作失误,桥式起重机可能会连带目标物共同撞在障碍物上,从而导致吊钩冲顶、负重超载、挤压碰撞以及吊绳断裂等安全事故,轻则造成经济损失,重则造成人员伤亡。
若是有一种自动避障系统,可以根据现场的实时情况,直接作出相应指令或提醒操控者出现安全隐患待处理,并且能够在危险来临前自动执行避障、制动等操作,使桥式起重机免于安全事故,就可以多一份安全保障,同时降低安全事故的发生率。针对这个问题,课题研究小组提出了利用双目摄像头扫描桥式起重机运行环境中所有物体的边缘像素点,构建三维虚拟环境,并根据实时数据计算桥式起重机及目标物与障碍物之间的实时距离,通过得出的数据与提前设定好的安全值进行比较,从而确定系统是否需要作出警告、避障、制动等指令的方法。
1 双目视觉避障系统
1.1 双目视觉的成像原理
双目视觉是计算机视觉研究领域的热点,它通过利用双目摄像头采集信息,然后由计算机的软硬件进行分析、计算,并对采集到的图像进行处理,来达到模仿动物双眼所形成的视觉效果[2]。该原理可以通过两台完全一致的摄像机获取环境的三维信息,与人的双眼类似,它能够通过看到的图像观察物体与自身之间的距离,并获得较为明显的深度感[3]。本文主要研究如何利用双目视觉原理来进行避障。
双目视觉系统由两个完全一致的摄像头平行放置组成,能够同步获取前方物体的位置信息,因为三维空间中两台相机之间有一定的距离,所以目标物上的目标点在左右两幅图像中成像的像素点有一定偏差,这个偏差即为视差[4]。双目视觉系统是基于视差,由三角法原理获取三维信息,并由两个摄像机的图像平面和另一侧物体之间构成一个三角形,利用两个摄像头之间的位置关系,得知目标物的三维尺寸以及特征点的空间坐标的成像方法。由双目视觉基本原理可知,要想获得三维空间内某一点的坐标,则需要在两台摄像机中找该点的对应点,如图1 所示。
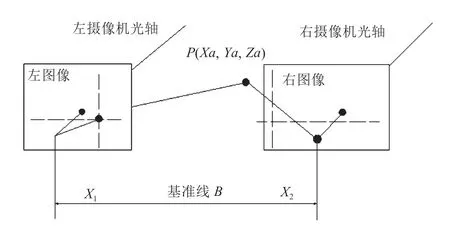
图1 双目立体成像原理图
1.2 双目视觉三维测量原理
由图1 可知,两台摄像机投影中心连线的直线距离为基线距离B,相机焦距为f,P为两台摄像机在同一时刻看到物体的特征点,分别在“左目”和“右目”上获取P点的图像,坐标分别为P1=(X1,Y1);P2=(X2,Y2),由几何关系可得:

可推算出视差D=X1-X2,再由此来推算出P点的三维坐标为:

由此可知,只要两台摄像机可以找到对应的匹配点就可以确定该点的三维坐标。并且基线越长,测量范围就越远。
1.3 双目视觉避障系统的流程
双目视觉避障系统的流程如图2 所示,具体判断位置的方式为:通过摄像头获取前方的环境图像,判断前方是否有目标对象,若有则获取目标对象的深度信息,然后判断目标对象中是否存在障碍物,若存在,则获取起重机与障碍物之间的距离,从而根据距离进行避障,若不存在,则说明目标对象仅为地面,则不采取避障措施。
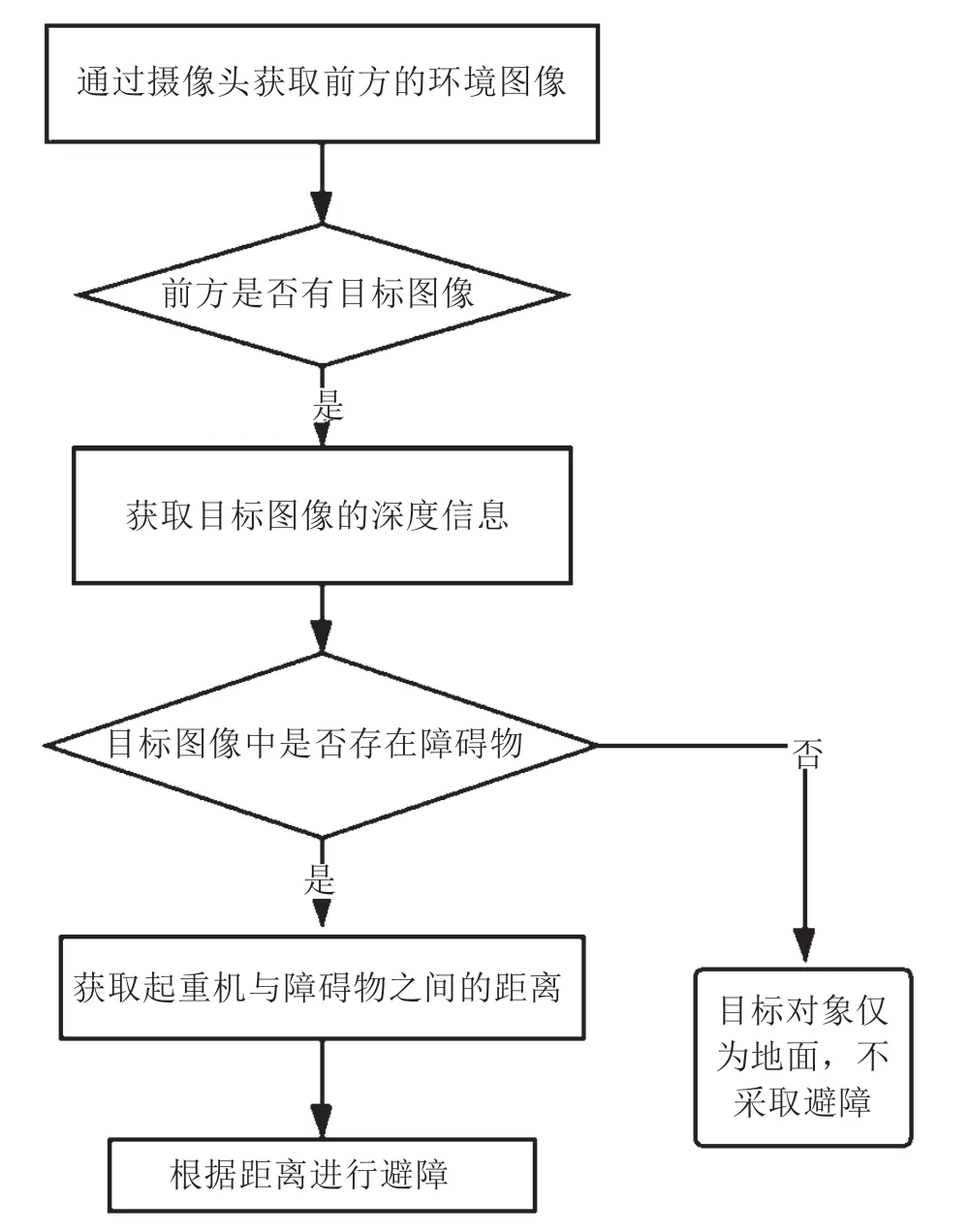
图2 双目避障系统在起重机上的避障原理
关于安全值的设定,需根据目标物的形状、现场的环境等因素进行选择。确定安全值R0之后,系统会根据虚拟环境中的实时数据计算桥式起重机和目标物与障碍物之间的实时距离R1,然后自动比较R0和R1的值,若R1>R0,则系统不发出危险指令,反之则发出危险指令,提醒操控者可能会出现危险;若操控者未及时作出有效处理,当R1≤0.5R0时,避障系统会立即对桥式起重机进行制动处理,直至工作人员对障碍物作出了有效处理。
2 双目避障系统在起重机上的应用
起重机运行时所遇到的障碍物类型主要分为静态障碍物和动态的障碍物2 类。对于起重机而言,静态障碍物是在运行之前便能观察到的,可以在运行之前规划好路线及时躲避;动态障碍物在起重机运行过程中出现的时间及位置都无法预知,因此无法提前规划路线[5]。双目避障系统可以对其捕捉到的动态障碍物进行跟踪,并通过跟踪的结果判断接下来的运动趋势,从而达到更好地避障效果。
2.1 双目立体相机的应用
考虑到桥式起重机的作业场景和安装成本等,本文选用双目立体相机作为避障系统中获取信息的仪器。与单目相机只能简单获取二维的场景信息相比,双目相机不但可以获取图像,还可以运用三角测量原理对所测量场景进行三维重建,从而直观地获取障碍物的空间位置及形状大小等信息。
双目立体相机的镜头焦距、两摄像头之间基线长度等因素决定了双目避障系统的结构,并且对系统的测量范围有着直接影响,传统双目立体相机的外壳已经封装好,其焦距以及基线长度都无法改变,对于使用场景的局限性较大。因此,为了增大双目避障系统在桥式起重机上的使用范围,本文采用自建相机的形式来完成在桥式起重机上的运用。自建相机由于不受外壳的限制,其基线及焦距均可根据使用场景及视野范围进行调整,使用范围更广,使用时限制的条件也更少。自建相机分为传感器和处理器两部分,其中传感器部分主要由如图3 所示的两台工业相机组成,该相机可根据使用条件及场景更换不同的镜片从而组合出所需焦距。

图3 SENTECH 工业相机
双目立体相机的安装位置可根据需求进行选择,起重机中可供工业相机选择的安装位置如图4 所示,其中深色方块所示区域即是工业相机的安装位置。安装时,两相机之间的基线距离可根据使用范围的大小进行调整。另外,对于图4 中没有展现到的单梁桥式起重机也可根据实际情况安装工业相机。相机的处理器部分可以安装在起重机的控制室内,通过控制室显示屏向控制者实时传输地面状况,从而使控制者作出准确及时的判断。
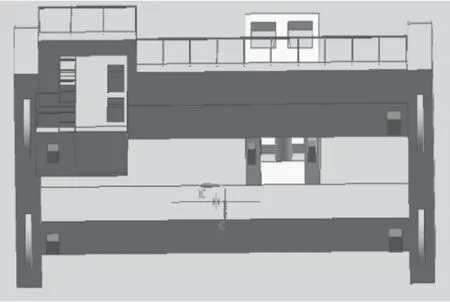
图4 可供工业相机选择的安装位置
2.3 双目避障系统在起重机限位器上的应用
限位器是保护起重机升降机构安全运行的装置,起重机升降机构上分别有上升极限限位器和下降极限限位器。在起重机作业过程中,当升降机构到达设定的极限位置时,限位器会及时发出报警信号,同时自动切断向危险方向运行的动力源。由于限位器在工作时会出现老化、磨损等情况,若不及时检查和维护,会出现限位器失灵的情况,容易发生重大事故,从而威胁到人身安全,造成不可逆的后果。双目摄像头很好地避免了限位器后期需要检查维护的工作,当升降机构的吊钩上升到设定的距离时,它能够通过精准的算法判断是否会发生危险,然后把信息传到起重机动力系统,从而自动切断动力源,制止升降机构的运行。
3 结论
本文构建了一种双目避障系统在桥式起重机上的应用方法,结论如下:
(1)将双目避障系统与桥式起重机相结合,可以减少起重机在运行时遇到视觉盲区而引发事故的情况;
(2)在运行中,由系统捕捉周围环境的实时画面并传输到起重机控制室,能够帮助操控者了解地面情况,从而确定障碍物位置;
(3)结合避障系统算法对物体进行三维重建,判断出作业区域的障碍物位置信息,能够使起重机安全平稳地运行。
