基于机器视觉的智能图书分拣装置研究设计
2021-11-24段学涛胡平辉王振飞唐盼南文超
段学涛 胡平辉 王振飞 唐盼 南文超

摘要:随着物质文化的需求提高以及科技实力的提升,自动化与智能化,已经成为现阶段工业化和批量化生产的必然要求。在图书馆方面也是如此,图书的自动化与智能化分拣已经成为一项待解决且急需解决的问题。20世纪50年代以来,计算机机器视觉技术已经开始逐步走进工业市场,成为了许多工厂上批量化生产系统的重要组成部分。以机器视觉作为图书分拣装置的传感部分,可以通过识别图书的外形特征,如图书的周长、直径、面积等,也可以通过覆盖区域形状识别,如粘贴在图书上的四叉树、矩描述子,去精准识别需要夹取的书。本研究希望设计出一个可以通过在APP上设定装置工作的时间以及工作量,并通过去识别书架上的二维码,将不同的书分还到不用的书柜中,达到智能分拣的效果,以减少同学还书时的不便。
关键词:自动识别;分拣;算法;计算机视觉;形状识别
0 引言
近年来中国重视智能一体化装置建设,从智能无人售卖机到智能无人超市再到智能图书馆,智能化建设逐步发展,但中国现有的智能图书馆建设还存在许多待解决的问题,与国外智能图书馆的建设相比较还存在有一定的差距。我国目前市场上图书分拣系统存在着诸多问题:1.现有得图书分拣装置,容易出现分拣过程中取不出书现象。2.图书馆分拣人员在进行图书分拣系统工作时,如若不注意,可能会造成图书损坏的现象,对图书造成极大的影响,影响读者二次阅读。3.国内目前的图书分拣领域自动化程度低,技术发展尚不够全面,需要进一步提高。
针对上述问题,我们设计一种基于机器视觉的智能图书分拣装置,可在读者归还图书时,自动进行夹取图书,并且可以通过电机的驱动带动装置,将夹取得到的图书归还到原本书架位置,进而提高图书分拣的分拣效率,减少工作人员的工作量。
1 系统总体方案设计
本装置将探索基于机器视觉的图书分拣技术。装置以树莓派4B为主控芯片,利用摄像头进行图像处理装置和二维码识别装置,通过摄像头OPENMC把识别到的图书信息和二维码信息返回数据库中。通过与数据库中预存的数据对比,以次确认图书的类别。确认图书的位置信息和类别信息后通过树莓派4b控制机械臂追踪抓取图书,将其放入对应的储存区域
本装置可以大大的提高图书分拣效率与准确性,减少还书时随意而造成分拣员不必要的工作量,从而能够更好地提高全国各地,各学校的图书分拣效率,节省人工成本。
2 机械结构设计
2.1导轨式移动平台
该导轨平台包括:底座、第一导轨、驱动装置、输入接口、主控制模块和用于放书的工作台。第一导轨相对安装于所述底座上,工作台置于第一导轨上,驱动装置用于驱动第一导轨左右滑动。输入接口与树莓派模块耦合,树莓派控制模块与电机驱动装置耦合,树莓派控制模块和电机驱动装置均置工作台内,输入接口设置在导轨平台上。该导轨平台能实时与外界设备进行通信,能实时对控制程序进行更新,从而精确控制平台在导轨上的滑动速度、位置等。
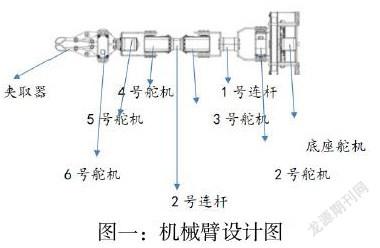
2.2.2机械臂设计
装置的底座舵机是一个扭矩力达到25kg的总线舵机,使得机械臂抓取图书的重量达到500g以上。底座舵机上方是一个可旋转360度的转盘,通过底座舵机和转盘,装置上的夹持器可抓取摄像头范围内的所有物体。2、3、4号舵机组成的连杆1和连杆2,连杆构成机械臂的支持部件也是增加夹取器活动范围的有效部位。5号和6号舵机互相垂直,5号电机负责控制夹取器的闭合,二而6号舵机时决定夹取器的旋转方向。具体设计如图所示:
3 软件设计
3.1目标位置检测算法
想要得到目标物体的位置,首先需要进行摄像头的标定,将物体不断移动到到摄像头视觉的中心。在图像中,会得到一个如下图所示的图像坐标系,图像中,始终会有一个中心原点,物体在图像中的坐标,则是以这个中心原点为参考点。因与物体的Z轴方向平行,故物体的X轴与Y轴坐标则以在摄像头检测区域的一半内的长和宽为标准。通过缩短目标物体与中心原点的间距,可以将目标物体,不断移动到图像中心,从而准备进行下一阶段机械臂的精准夹取。
3.2图书书脊识别算法
书脊视觉识别的难点在于书脊图像本身较为复杂,因每本书的轮廓和摄像头采集得到的图像细节部分都不易区分。当算法运行时,针对书脊图像视觉识别的特点,将小波分析、Hoough变换等多种算法结合,通过图像处理算法精确每本书的厚度,利用摄像头对书脊的定位,驱动舵机转动机械臂,完成抓取图书操作。并利用视觉系统定位需要放书的书架位置,驱动电机带动装置再次通过机械臂将书放回原位。
3.3 APP的设计
APP的主要功能是控制装置的运行,可以显示装置当日的图书分拣数量和设备状态。可通过WiFi连接远程控制装置的开启,并且可以设定装置工作的时间长短。
4 解决的关键问题
整个分拣系统中目标图书和摄像头的相对位置的检测结果的精准性时决定抓取装置能否捕捉到目标图书的前提。而对图书书脊的图像处理综合和多种算法的有点,其处理结果的效果是保证分拣效率最为关键的一环。
争对上述问题,我们利用图书书脊上的二维码标签,在solvePnP算法上结合摄像头的内置参数和Opencv的相关的二维码识别算法。在检测程序运行时检测到目标图书就可以得到目标图书在图像中的坐标,之后通过solvePnP函数即可得到需要机械臂转动的平移向量和旋转向量,此時摄像头中得到的坐标是以摄像头中心为原点的,需要得到机械臂正确的转角就需要对这个坐标进行平移,装置进行移动,让机械臂瞄准待分拣图书的书脊进行夹取,并将夹取得到得图书进行归类处理,归还至原处。
5 参考文献
[1] Abdulrahman A, Abdulmalik A S, Mansour A , et al. Ultra Wideband Indoor Positioning Technologies: Analysis and Recent Advances[J]. Sensors, 2016, 16(5):1-36.
[2] 梁佳成.分析图书自动分拣系统在图书馆的应用[J];智库时代;2018年51期.
