多旋翼无人机的智能飞行技术发展概况及应用前景
2021-11-24赵渤宇任飞
赵渤宇 任飞


摘要:本文介绍了人类历史上第一架飞机“飞行者一号”,以及多旋翼无人机的基本飞行和控制原理,并概述了多旋翼无人机存在的关键技术问题、智能飞行技术的发展现状以及应用前景。
关键词:飞机、多旋翼无人机、飞控系统、飞行技术、智能化
1. 概述
1903年莱特兄弟在滑翔机的基础上,制造出了一架具有动力和操纵系统的双翼飞机 “飞行者一号”,并驾驶它实现了人类首次重于空气的航空器持续而且可操纵的动力飞行。虽然“飞行者一号”第一次飞行时间仅有12秒,飞行距离约36.6米,但这标志着人类飞行时代的到来。
如今,各种航空飞行器已屡见不鲜,如民航机、战斗机、军用无人机、直升机、以及各种廉价的可供人们娱乐的多旋翼航拍无人机与五花八门的固定翼航模。其中多旋翼飞行器结构简单、成本低廉、容易操控、不需要跑道起飞、并且可在空中稳定悬停,因而其用途越来越广泛,比如目前四旋翼无人机通常是航拍娱乐、编队飞行表演、电力巡检及植物保护等领域的首选飞行器方案、同时多旋翼无人机也在消防灭火、交通运输、甚至军事等领域表现出巨大的应用潜力[1-3]。
已上市场的部分多旋翼无人机已经能够在室外空旷的环境下实现稳定飞行、精准悬停、精确定位、甚至能够实现一些简单的自主飞行技术,如自动返航、自动避障、以及自主规划路线等。然而,随着人工智能技术的发展以及智能化的市场需求,提高多旋翼无人机的自主飞行或者说智能化飞行技术正当其时。因此,本文对航空器的飞行原理做了简单的科普介绍,并概括了当前最流行且用途最广的多旋翼无人机的智能飞行技术的发展现状及趋势,以及当前存在的问题。
2. 基本飞行原理
如图1所示,相比现代飞机人类真正意义上的第一架飞机“飞行者一号”结构非常简单,主要由一台重77公斤12马力的汽油发动机、双机翼机体、两个螺旋桨、前置的升降舵、后置的方向舵、连接发动机与螺旋桨的铰链、以及控制升降舵的操纵杆和控制机翼变形及方向舵的传动装置组成[4]。发动机驱动两个螺旋桨以相反的方向旋转从而使空气向后流动,根据牛顿第三定律反之机体受到向前的推力,从而使飞机加速。当飞机速度足够大时,根据伯努利原理,弯曲(横截面“上凸下平”)的机翼上方的空气流速大而压力小,下方的空气流速小而压力大,从而使机体产生升力,当升力大于机体和驾驶员总重量时,飞机腾空而起。通过用手调整操纵杆进而控制升降舵,用臀部的横向移动调整机翼的变形程度和方向舵,从而可以调整飞机的飞行方向和姿态。
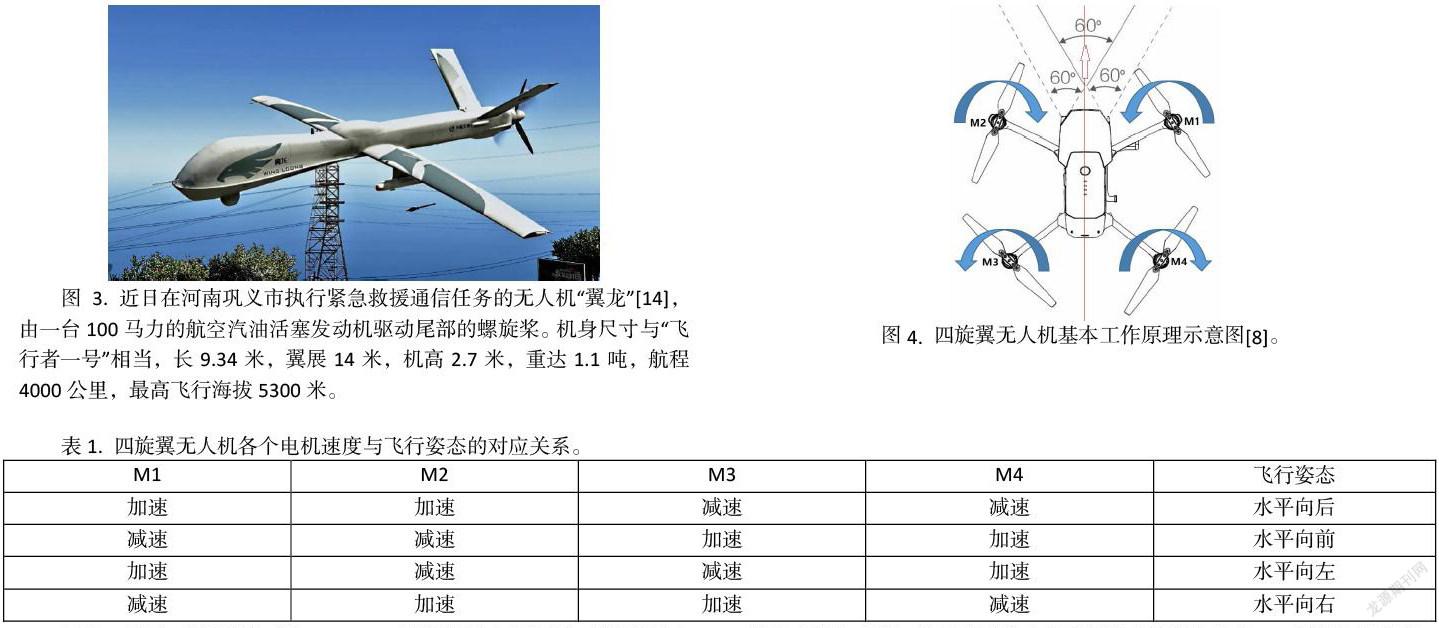
“飞行者一号”虽然结构简单,但其中蕴含的原理依然被使用现代飞机中,比如如图2所示的民航机的升降舵和方向舵[5],即使第五代战斗机如F-22、苏-57、歼-20,四代机如F-15、苏-35和歼-15,以及捕食者、翼龙和彩虹等军用无人机机身上也有“飞行者一号”的影子。值得一提的是,军用无人机也通常采用汽油发动机驱动螺旋桨作为动力来源,例如如图3所示的是7月20日在河南执行紧急救灾通信任务的军民两用无人机“翼龙”[6]。目前民航机和战斗机大多采用涡扇或涡喷发动机,根据牛顿第三定律,通过涡扇发动机向后喷出高速气体,可以使机体受到向前的巨大的推力。与火箭发动机相似,高速气体主要是由燃料燃烧产生的,只不过民航机的航空发动机吸入空气作为燃料的氧化剂,而火箭发动机则既能携带燃料又携带氧化剂。战斗机和民航机发动机的最大区别在于,民航机通常使用大涵道比(外涵道与内涵道空气流量的比值)涡扇,燃油效率高,而战斗机通常使用小涵道比的高推力涡扇或涡喷,相对来说燃料效率比较低,某些先进的发动机还具有矢量喷口,即通过改变气体喷出角度而提高机动性。
与“飞行者一号”及现代民航机和战斗机不同,多旋翼无人机小巧廉价,不需要特定跑道起飞。多旋翼无人机通常是指含有三个及以上旋翼的无人驾驶飞机。根据多旋翼无人机具有的旋翼数量,可分为四、六、八、十二……旋翼等多种类型,其中四旋翼无人机应用最广。如图4和表1所示,可通过每个轴上的电动机驱动桨叶转动,从而产生推力,通过改变不同桨叶之间的相对转速而改变相应轴的推进力大小,从而控制飞行器的运行轨迹。如图4 所示,红色箭头代表无人机的朝向,无人机飞行时旋翼(桨叶)M2、M4顺时针旋转,M1、M3 逆时针旋转而抵消互相产生的作用力使无人机保持稳定,飞行姿态与电机转速的关系详见表1[7]。因此,四旋翼无人机的姿态和位置的控制都是通过调节四个驱动电机的转速而实现的。通常,四旋翼无人机的运动状态可分为偏航运动、垂直运动、滚动运动、俯仰运动及悬停五种状态。
如图5所示,以大疆公司的Mavic Pro四旋翼无人机为例,多旋翼无人机主要由飞行控制系统、动力系统、定位系统、图传系统、以及各种传感器组成。飞行控制系统是无人机的大脑,简称飞控,主要由遥控器和无人机中的嵌入式处理器系统构成。动力系统则主要包括电池、电机、电调及桨叶。定位系统主要由GPS、气压计、视觉摄像头及超声波传感器组成。图传系统主要由一体式云台相机及2.4GHz 和5.8GHz 的OcuSync图传系统组成。惯性测量单元、GPS、气压计、电子罗盘、视觉摄像头、超声波传感器等种传感器采集的数据传回飞控,经飞控运算处理判断后并下达指令,最后由动力系统控制无人机的飞行、悬停及姿态变化。
3. 智能飞行技术
3.1 多旋翼无人机研究的关键问题
目前市场上的多旋翼無人机在GPS信号良好时可精准定位,在GPS信号欠佳光照条件满足视觉系统需求时可通过视觉系统定位,然而在GPS信号差或指南针受干扰,且光照条件差不满足视觉定位要求时,无人机会进入姿态模式无法实现精准悬停甚至飘移,从而容易引起安全事故。因此,发展廉价且更高精度的定位系统依然是多旋翼无人机研究的核心问题之一。此外,随着通信技术及人工智能的发展,多旋翼无人机的智能化、终端化、集群化必将是发展趋势。特别是智能飞行技术的发展将进一步降低多旋翼无人机的操控难度、提高无人机的安全性和可靠性,进而扩大多旋翼无人机的应用领域。
3.2 自主飞行技术的发展概况
目前已上市场的部分多旋翼无人机已经能够在室外空旷等简单的环境下实现稳定飞行、精准悬停、精确定位、甚至还能实现一些简单的自主飞行技术,如自动返航、自动避障、以及自主规划路线等。然而,在复杂环境下,如在存在电磁干扰情况的狭小动态空间中实现无人机的稳定飞行依然具有较大难度,并且现有的自主飞行技术依然非常单一,只能在特定的环境下进行。因此,研发具有高度智能化的可自主作业的多旋翼无人机是重要发展方向之一,这需要飞控可以通过机体搭载的传感装置采集的数据实时地进行自动判断和下达指令[9-11]。
3.3 智能化发展趋势
随着人工智能技术、通信技术、嵌入式控制技术以及各种低功耗高精度传感器的发展,多旋翼无人机将进一步高度智能化,从而进一步降低使用门槛并扩大应用范围,同时提高安全性和可靠性。目前虽然部分多旋翼无人机已具备避障、自动返航及自主规划路线等自主飞行技术,但这还远远不够,而且这些技术在复杂环境下还不成熟。例如,目前的自动避障技术主要基于视觉摄像头和超声波传感器采集的数据进行判断,对于电线等表面积或体积较小的物体难以识别。因此,智能化的发展首先依赖于数据采集传感器性能的发展,以及低延迟率的无人机通信技术。其次,需要强大算力的嵌入式处理器对传感器采集的数据进行实时运算处理并下达指令。非常重要且有前途的是,与汽车无人驾驶系统类似,未来高度智能化的多旋翼无人机的控制必将借助强大的深度学习算法,对采集的各种环境下的数据进行归纳学习进而实时做出准确判断甚至预测,进而极大地提高多旋翼无人机的智能化飞行技术。
4. 智能飞行技术的应用前景
多旋翼无人机已经越来越高度智能化和专业化,智能飞行技术的应用必将极大地推动多旋翼无人机在航拍娱乐、编队飞行表演、工程测绘、应急广播、搜寻侦查、电力巡检、植保农药、甚至消防救援、物流配送、交通运输及军事等领域的应用。此外,多旋翼无人机也将进一步渗透到其它意想不到的领域,例如系留无人机照明为抗疫期间火神山、雷神山医院的建设提供了夜间作业保障[12],同时多旋翼无人机在应急广播、巡逻疏导、防疫宣传、物资投递、喷洒消毒等方面发挥了重要作用,为疫情防控提供了重要的科技支持[13]。
5. 总结
多旋翼无人机具有体积小、成本低、灵活性高及稳定的悬停能力等多重天然优势,相信随着智能飞行技术的发展,多旋翼无人机将进一步渗透到各个领域,使生活生产所需的飞行工作变得如同鸟儿翱翔蓝天一般简单。
参考文献
[1]杨薇霖, 周巍. 多旋翼无人机在灾害现场救援中的应用[J]. 科技创新与应用, 2020 (15).
[2]孙嫱, 张志林, 林财徳,等. 基于多旋翼无人机的输配电线路故障精确测距研究[J]. 电子设计工程, 2021 (13).
[3]http://www.360doc.com/content/18/1125/11/39872701_797091057.shtml
[4]https://en.wikipedia.org/wiki/Wright_Flyer
[5]https://ryanaircheckintime.blogspot.com/2019/10/aeroplane-wing-flap.html
[6]https://baijiahao.baidu.com/s?id=1705952288099620496&wfr=spider&for=pc
[7]白玉. 四旋翼无人机的应用与发展综述[J]. 广西农业机械化, 2020 (2).
[8]大疆创新科技有限公司. Mavic_Pro_用户手册 V2.0,2017.
[9]谢兵, 梁孝林, 祁宇明,等. 复杂环境下无人机结构设计与姿态分析[J]. 机械工程师, 2021 (3).
[10]孙澜琼, 易哲菁, 林冬生. 探析多旋翼无人机战场应用前景[J]. 图形处理与多媒体, 2018 (9).
[11]冉剑, 佟佳慧. 基于在线仿真的无人机飞控系统智能校正技术[J]. 南京航空航天大学学报, 2019(6).
[12]https://www.sohu.com/a/398376780_354880
[13]https://mp.weixin.qq.com/s/v1pSXzUQzUAOusGniogyXQ
[14]中央電视台国防军事频道官方微博 https://weibo.com/6189120710/KpTSNkh1n?type=comment
作者简介:赵渤宇(2000-),男,满族,辽宁锦州人,辽宁科技大学本科学生。
通讯作者:任飞(1992-),男,汉族,山西太原人,天津大学博士研究生,邮箱:mrrenfei@163.com
