基于复合摆线的下肢假肢步态规划及运动仿真
2021-11-23刘旭辉胡慧娜丁志娟方紫韵
刘旭辉, 胡慧娜, 简 震, 丁志娟, 方紫韵
(上海应用技术大学机械工程学院, 上海 201418)
下肢假肢是帮助下肢截肢患者恢复行走能力的主要工具,以磁流变液为代表的半主动型磁流变阻尼下肢假肢受到了广泛的应用[1]。为实现下肢假肢稳定、高效的行走,需要对下肢假肢进行合理的步态规划。常见的步态规划方法有轨迹跟踪法、中枢模式发生器法及数学模型法[2]。徐俞弢等[3]采用Vicon光学动作捕捉系统,采集健康人体的下肢运动信息,并进行了分析。该方法获得的关节曲线具有一定的稳定性,但步态较为单一,达不到步态任意变换的目的。Fu等[4]通过耦合Rayleigh振子搭建了中枢神经网络,对下肢假肢进行了步态规划。该方法具有良好的适应性,然而该方法的稳定性不足,在支撑相的加速度较大,对腿部具有较大的反作用力,增加了穿戴者的腿部负担。数学模型中复合摆线法以其形式简单、稳定性好的特点被广泛应用于各种移动式机器人和医疗假肢的步态规划中。
针对以上设计的不足之处,设计了一种新型磁流变阻尼下肢假肢,并针对其y方向加速度过大而造成稳定性不足的问题,通过复合摆线法对其进行了步态规划。最后通过仿真软件对下肢假肢进行了运动仿真,利用关节电机进行轨迹跟随实验,验证了下肢假肢结构设计和步态规划的合理性。
1 下肢假肢的结构设计
良好的稳定性、减振性和美观性是下肢假肢产品必须具备的。刘旭辉等[5]设计了一种智能假肢膝关节,然而对下肢的步态质量产生影响。Arteaga[6]利用磁流变液设计了一款机器人假肢,假肢体积庞大,且容易产生附加扭矩,增大了腿部的受力。针对以上问题,将四连杆机构与磁流变阻尼器进行结合,设计了一种新型磁流变阻尼下肢假肢,其结构如图1所示,其中残肢侧采用磁流变阻尼器实现对患者腿部的缓冲减振。
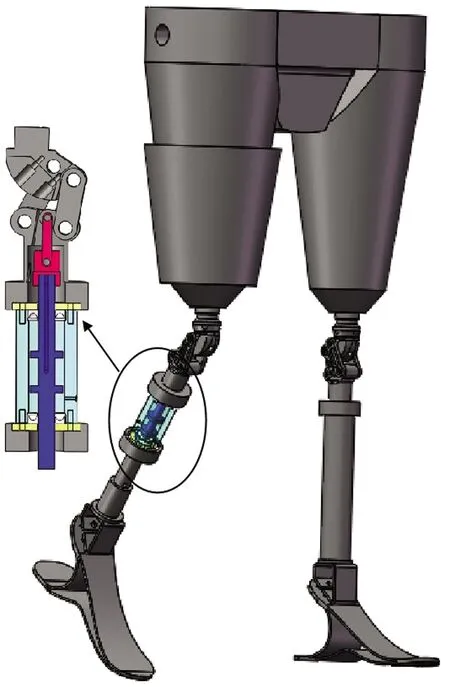
图1 下肢假肢虚拟样机模型Fig.1 Virtual prototype model of lower limb prosthesis
2 下肢假肢的步态规划
2.1 人体下肢步态特征
探究人体下肢的运动规律是进行步态规划的前提,如图2所示,人体的一个完整的步态周期可分为摆动相和支撑相,支撑相约占步态周期的60%,摆动相约占40%[7],对截肢患者而言,增加假肢处于支撑相的时间有利于提高步态稳定性[8]。
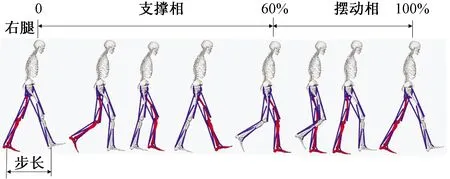
图2 人体下肢步态参数Fig.2 Gait parameters of human lower limbs
2.2 足端步态规划
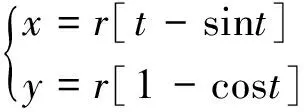
复合摆线法是足端步态规划中常见的一种方法,因为其位移、速度和加速度在前进和抬起方向上均为正弦函数,故触地时地面对足端冲击力较小,可保证下肢交替运动时更加平稳且不易打滑,具有良好的稳定性。假设下肢假肢在xy平面运动,足端轨迹可表示为[9]
(1)
式(1)中:r为半径。
x方向的位移、速度、加速度应满足式(2)约束。
(2)
y方向应满足的位移、速度、加速度应满足式(3)约束。
(3)
利用MATLAB优化工具箱对式(1)~式(3)进行求解,求得的x,y方向轨迹曲线可表示为
(4)

由于在支撑相期间足端在y方向位移为零,只需考虑x方向位移,因此只研究摆动相足端轨迹,由于足端和地面的摩擦作用,即可实现下肢假肢的向前移动。设T=2Tm=2 s,S=600 mm,H=120 mm。利用MATLAB求得足端轨迹,结果如图3所示。
图3 足端轨迹Fig.3 Foot trajectory

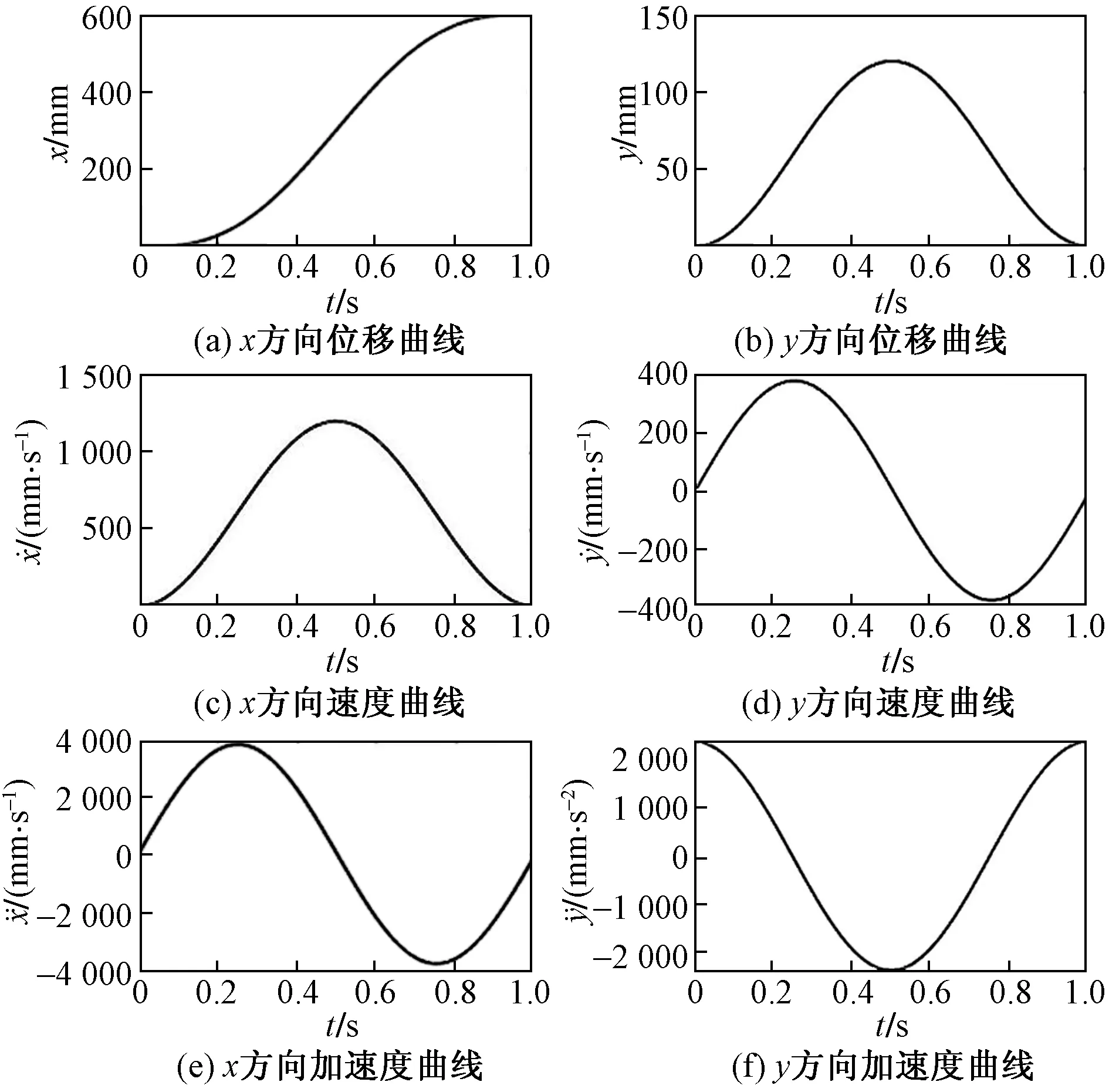
图4 足端位移、速度及加速度曲线Fig.4 Foot displacement, velocity and acceleration curve
2.3 足端步态优化

(5)
(6)
式中:n为频率系数,经过多次试算,n=4时能获得较好的波形曲线。
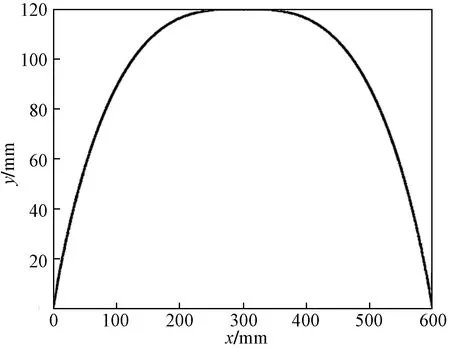
图5 优化后的足端轨迹Fig.5 Optimized foot trajectory
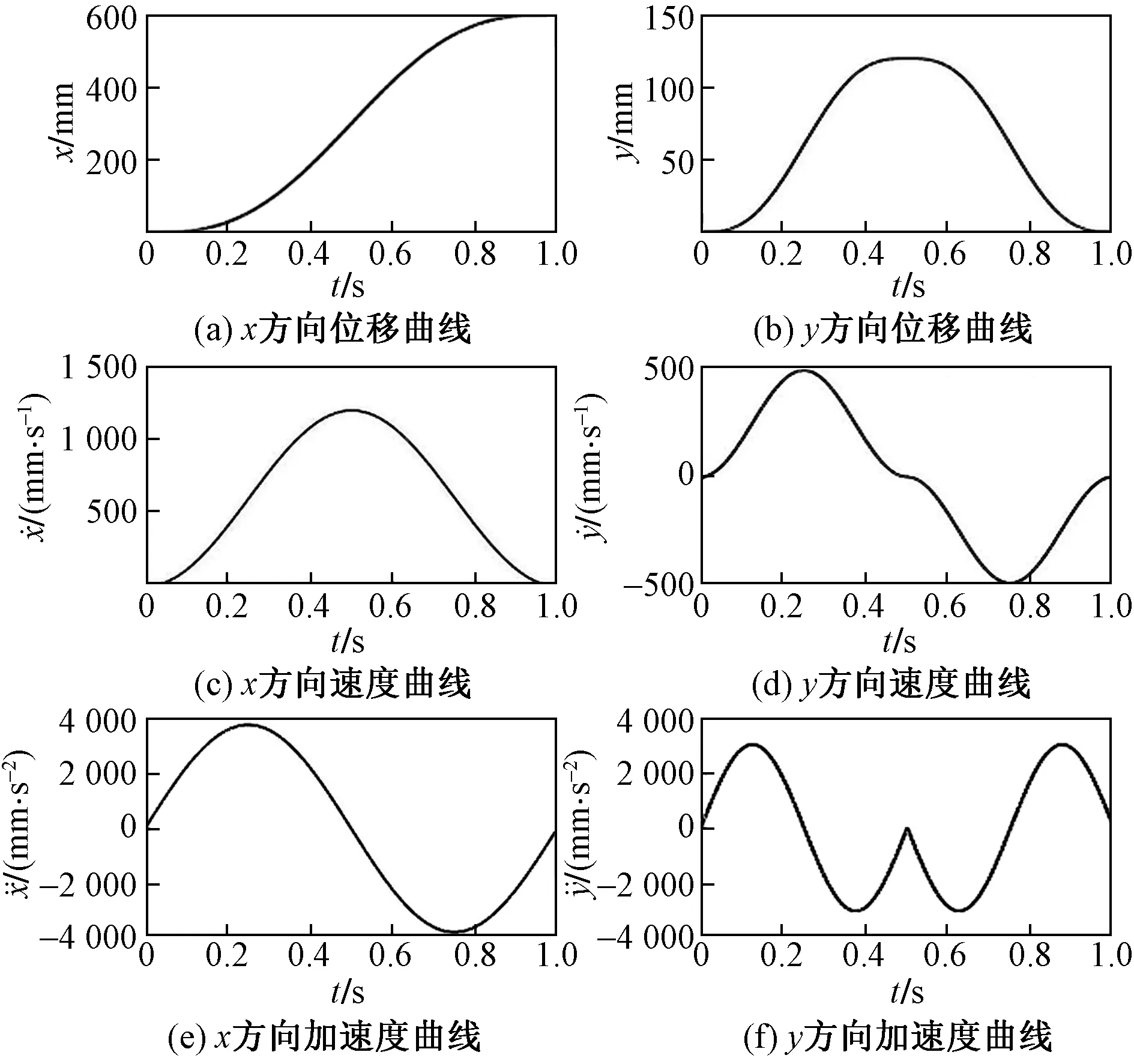
图6 优化后的足端位移、速度、加速度曲线Fig.6 The displacement,velocity and acceleration curve of the foot after optimization
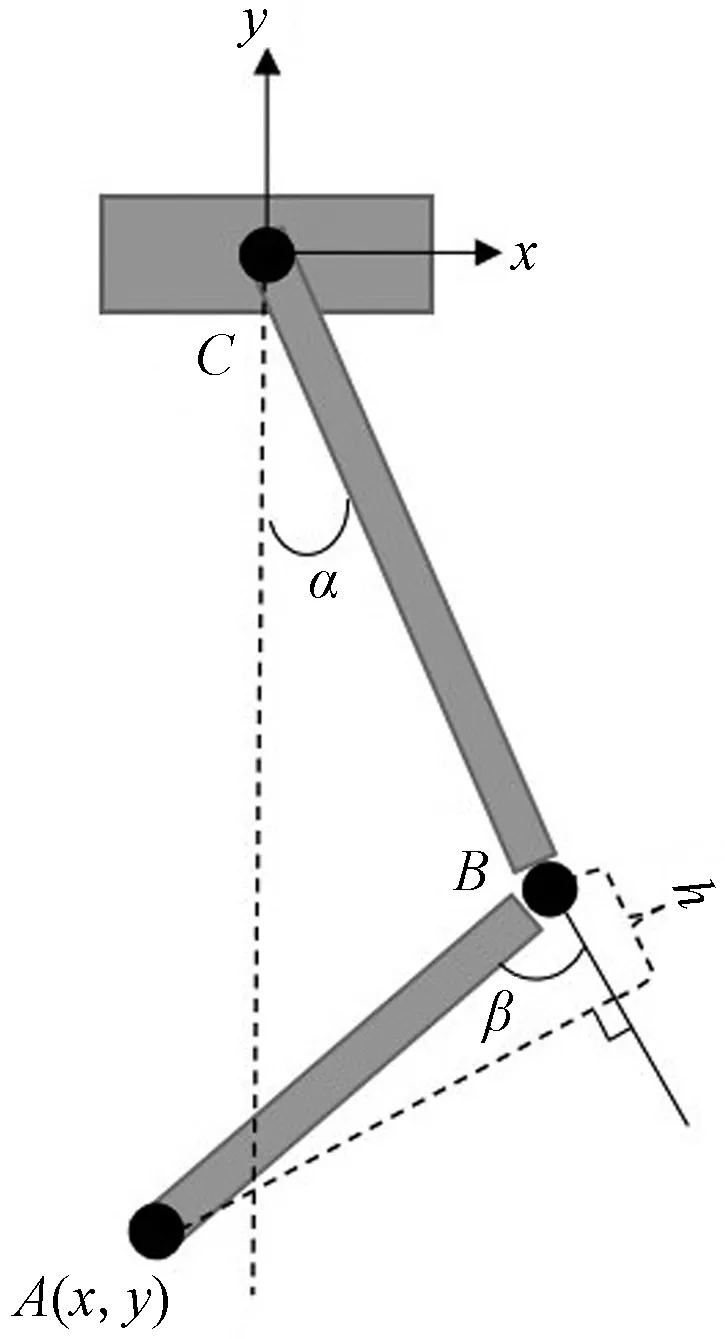
图7 下肢单腿结构简图Fig.7 Structural sketch of single leg of lower limb
2.4 逆运动学求解
通过对优化后的足端轨迹进行逆运动学求解,可获得下肢假肢的关节曲线,图7为简化后的下肢假肢结构示意图。以髋关节质心处为坐标原点,A(x,y)为足端坐标,α为髋关节角度,β为膝关节角度,LAB为小腿长度,LBC为大腿长度,LAC为足端到原点的距离,h为小腿转动中心到垂足的距离。
(7)
正常人的大腿长度约为身高的0.34倍,小腿长度约为身高的0.21倍[10]。以身高175 cm的男性为研究对象,取LAB=37 cm,LBC=60 cm。根据图7的几何关系, 可通过式(7)求得膝关节和髋关节的关节曲线。图8为求得的髋关节和膝关节在一个步态周期内的关节曲线。可以看出,在一个步态周期内膝关节的角度变化范围是(0°,45°),最大屈曲角出现在摆动期。髋关节的角度变化范围是(-10°,25°),最大摆动角出现在摆动期。
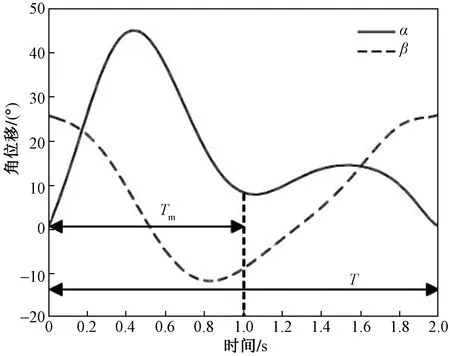
图8 髋关节和膝关节角度曲线Fig.8 Hip and knee angle curves
3 运动仿真分析
为验证通过复合摆线对下肢假肢步态规划所得关节曲线的合理性,采用Solidworks motion仿真软件对其进行运动仿真。分别在髋关节和膝关节处放置关节电机,以髋关节和膝关节角度曲线(图8)为参考曲线,采用样条曲线的方式驱动关节电机带动下肢假肢关节转动。图9为一个步态周期内下肢假肢的运动仿真结果。在仿真的基础上,对关节电机进行了轨迹跟随实验,如图10所示,得到髋关节与膝关节的对比轨迹。图11、图12分别为一个步态周期内髋关节、膝关节的转动角度对比。观察图9、图11、图12可知, 下肢假肢的运动符合正常人体的步态特征,具有良好的仿生性。因此通过复合摆线法对下肢假肢的步态规划是合理的。

图9 下肢假肢运动仿真Fig.9 Motion simulation of lower limb prosthesis
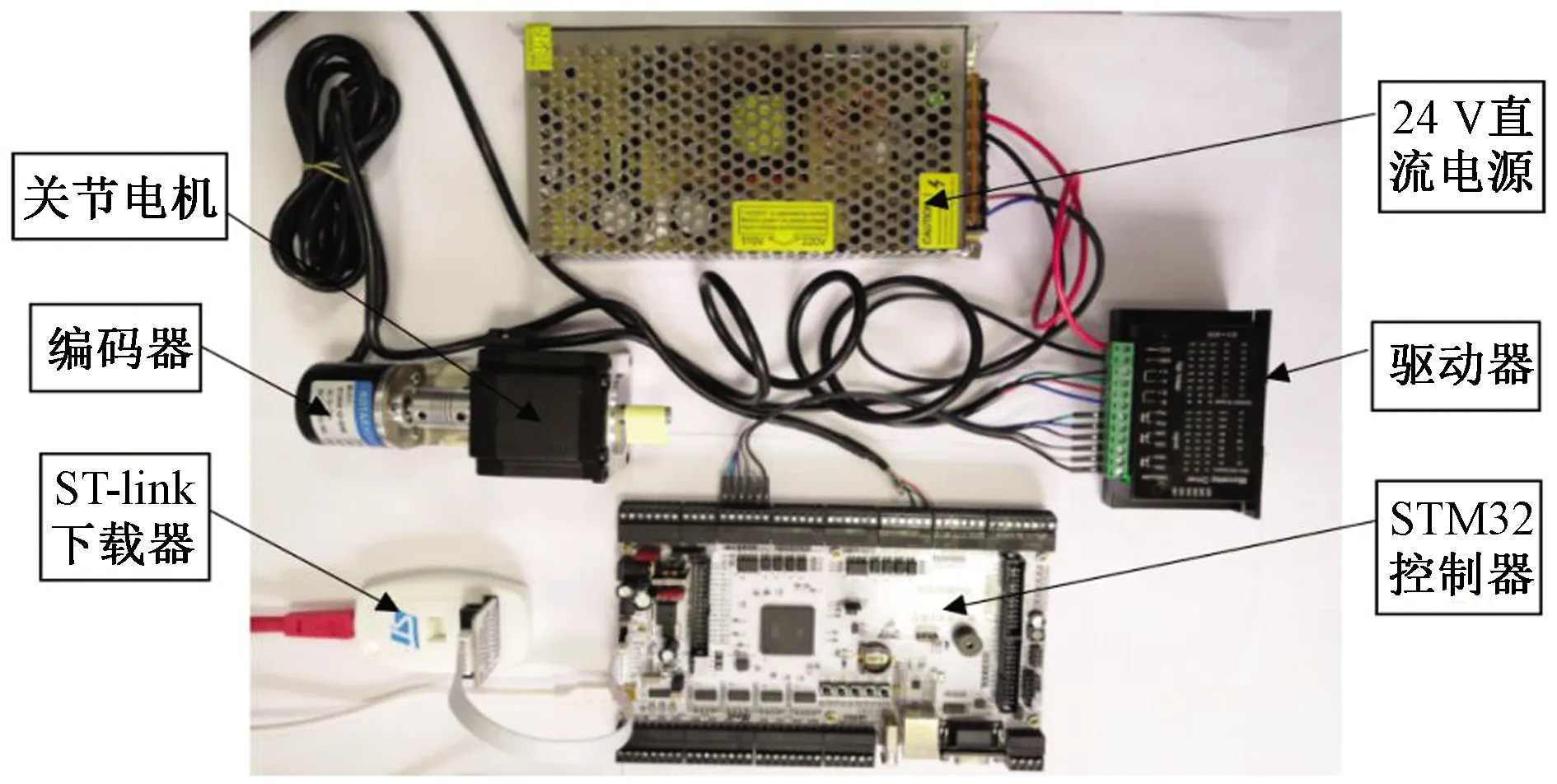
图10 关节电机轨迹跟随实验Fig.10 Joint motor trajectories follow the experiment
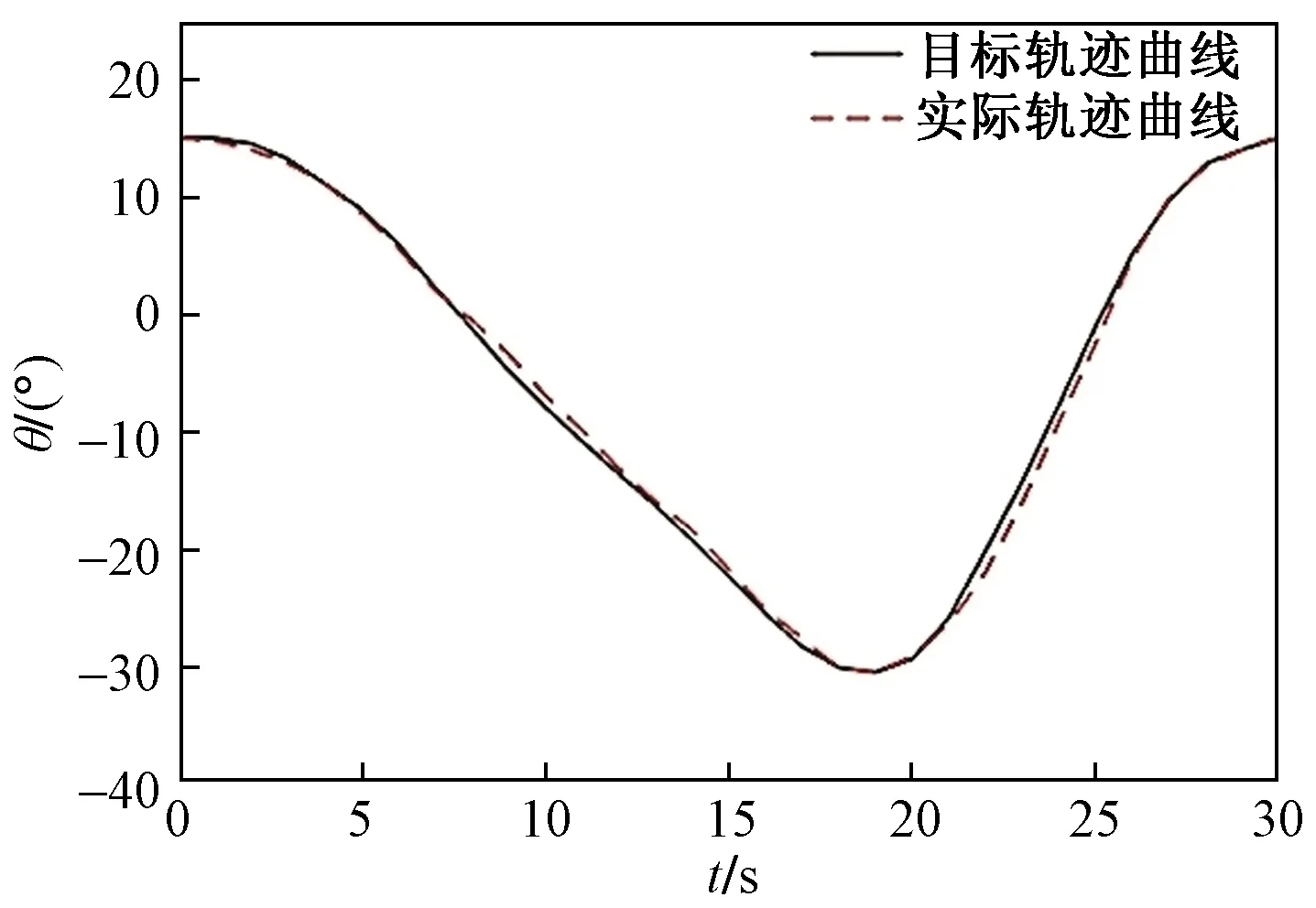
图11 髋关节目标轨迹曲线和实际轨迹曲线Fig.11 Hip target trajectory curve and actual trajectory curve
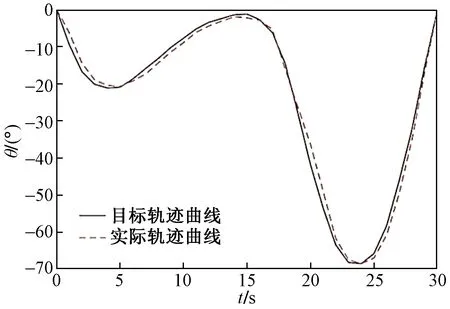
θ为转动角度图12 膝关节目标轨迹曲线和实际轨迹曲线Fig.12 Knee target trajectory curve and actual trajectory curve
4 结论
(1)通过磁流变阻尼器和四连杆机构的结合,设计一种新型磁流变阻尼下肢假肢,其结构简单、响应快速、稳定性良好,对新型智能假肢产品的研发具有一定的参考意义。
(2)采用复合摆线法对下肢假肢进行了步态规划,并针对其y方向加速度过大而造成稳定性不足的问题进行了步态优化。
(3)通过对下肢假肢的运动仿真,验证了步态规划的合理性。
(4)仅对平底行走这一路况下的步态进行了规划,并未考虑其他路况(如上下楼梯、斜坡)情况下的步态特征,后期还需进一步探讨。
