基于DTC-SVM的地铁并联牵引电机控制策略研究
2021-11-22张东浩
张东浩, 王 英
(大连交通大学 电气信息工程学院, 辽宁 大连 116028)
0 引 言
在地铁车辆设计和制造中,为了减少成本以及适应地铁列车狭小的安装空间,中国地铁车辆普遍采用单逆变器驱动多电机的方案,从而减少逆变器的数量、降低造价、减轻轴重,增大乘客的乘坐空间和载客量。但两并联牵引电机因轮径差、电机参数不同等原因导致电机间负载不均衡[1-2],如果不对电机间转矩差进行控制,有可能出现空转和滑行,对轮对和钢轨造成损伤,严重时影响列车运行时的稳定性。因此,有必要研究先进的控制方法来降低两并联牵引电机的转矩差,减小转矩脉动,从而提高地铁并联牵引电机控制系统的性能。
文献[3-4]对并联加权矢量控制方法进行了改进,通过q轴磁链观测器观测得到的电机转速来实时调整并联矢量控制的权重,但没关注城市轨道交通领域中架控或车控时并联电机的转速是具有相关性的。文献[5]在两并联异步电机加权矢量控制模型的基础上,提出了新型的两速度耦合并联异步电机控制策略,但没讨论在轨道交通领域中并联电机的负载模型。文献[6]提出了两并联异步电机的平均传统直接转矩控制(DTC),但由于传统DTC的固有缺点,电机的转矩脉动较大。文献[7]将多台并联电机的参数进行平均化,等效为单电机进行控制,采用改进的基于空间矢量调制(SVM)的DTC,减小了转矩波动,使磁链波形更加平滑,但没引入加权系数,当电机参数不同或负载有较大差异时,达不到理想的控制效果。
为了解决上述问题,本文在现有的平均DTC的基础上进行改进,提出在城市轨道交通领域中同一转向架下速度耦合两并联异步电机加权DTC,通过实时观测的电机转矩来实时计算加权值,实现了的动态控制。
1 轮轨黏着关系理论和双轴电机负载模型
1.1 轮轨黏着理论
地铁的轮轨接触处因为重力的原因会发生弹性形变,当车辆克服阻力向前行驶或者减速过程中,在钢轨和车轮的轮轨接触面部分会发生压缩和拉伸现象,一般轮轨接触面的前部,也即压缩部分没有相对滑动,称为滚动区,接触面的后部,也即拉伸部分有相对滑动,称为滑动区。滚动区的面积随着轮轨切向力的增大而减小,同时滑动区的面积将增大,当滚动区面积为0时即发生了空转和滑行。这种现象也称为蠕滑,会导致在牵引时车轮的圆周线速度比实际车体的移动速度高,制动时则相反,用蠕滑速度vs表示蠕滑程度的大小[8]:
vs=vw-vt
(1)
式中:vw为车轮的圆周线速度;vt为车体的移动速度。
正是由于蠕滑的存在,电机的转矩才转变为轮轨间列车牵引和制动的黏着力,蠕滑程度的大小决定了黏着力的大小。在稳定区时,轮轨间的黏着力随着蠕滑速度的增加而增加,但当蠕滑速度超过临界值到达非稳定区后,蠕滑速度继续增加会导致黏着力急剧减小。其中黏着系数计算公式一般采用经验计算公式[9]:
μ=c·e-a·vs-d·e-b·vs
(2)
式中:a、b、c、d为计算参数,不同轮轨接触条件计算参数不同。
地铁车辆的轮周牵引力可表示为
Fμ=μ·Mmg
(3)
1.2 转向架双轴模型
图1为典型的地铁列车架控驱动系统示意图。对转向架上的动轴进行分析可知,牵引电机的转矩施加到轮对上,产生让列车前进的黏着力[10],因此:

图1 同一转向架下车体的力传递模型
(4)
式中:Tt为牵引电机输出折算后的转矩;r为动轮半径;ig为齿轮箱传动比。
地铁车辆同一转向架下并联异步牵引电机分别驱动的不同车轴之间具有机械耦合关系,为了研究地铁牵引电机并联运行方式下的控制问题,需要建立起符合列车实际情况的并联异步牵引电机负载模型来对实际负载转矩进行模拟。同一转向架下2个动轮的轮缘线速度可以视为近似相同[11]:

(5)
式中:ωm1、r1以及ωm2、r2分别为动轴1和动轴2的转速和车轮半径;Jequ为电机侧等效转动惯量。
由式(5)可以推导出2台电机负载转矩TL1和TL2之间的关系:

(6)
1.3 同一转向架的并联牵引电机等效负载
车体的运动方程如式(7),轮周牵引力克服车体的运动阻力,并推动车体加速运动。为了简化模型,式(7)仅考虑基本阻力。

(7)
式中:n为动拖比;Mm为动车质量;MT为拖车质量;vt为车体速度;f为地铁车辆的基本阻力。
f可以表示为

(8)
式中:x、y、z为计算参数,不同地铁列车计算参数不同,本文根据北京地铁13号线车辆的数据进行建模研究[10]。
基于以上运算式,可以搭建出地铁列车同一转向架下并联牵引电机的等效负载模型,如图2所示,其中Mm1为单动轴所承担的车体质量。

图2 列车并联牵引电机负载转矩模型
2 并联电机DTC-SVM策略
传统DTC通过查询开关表的方式来选择合适的电压矢量,通过2个滞环比较器实现对磁链和转矩的直接控制。但由于滞环比较器自身的原因,逆变器的开关频率不固定,转矩脉动大。为了改善上述缺点,本文采用基于SVM的DTC方案,通过PI调节器来实现磁链和转矩的双闭环控制[12]。单电机的DTC-SVM原理如图3所示。
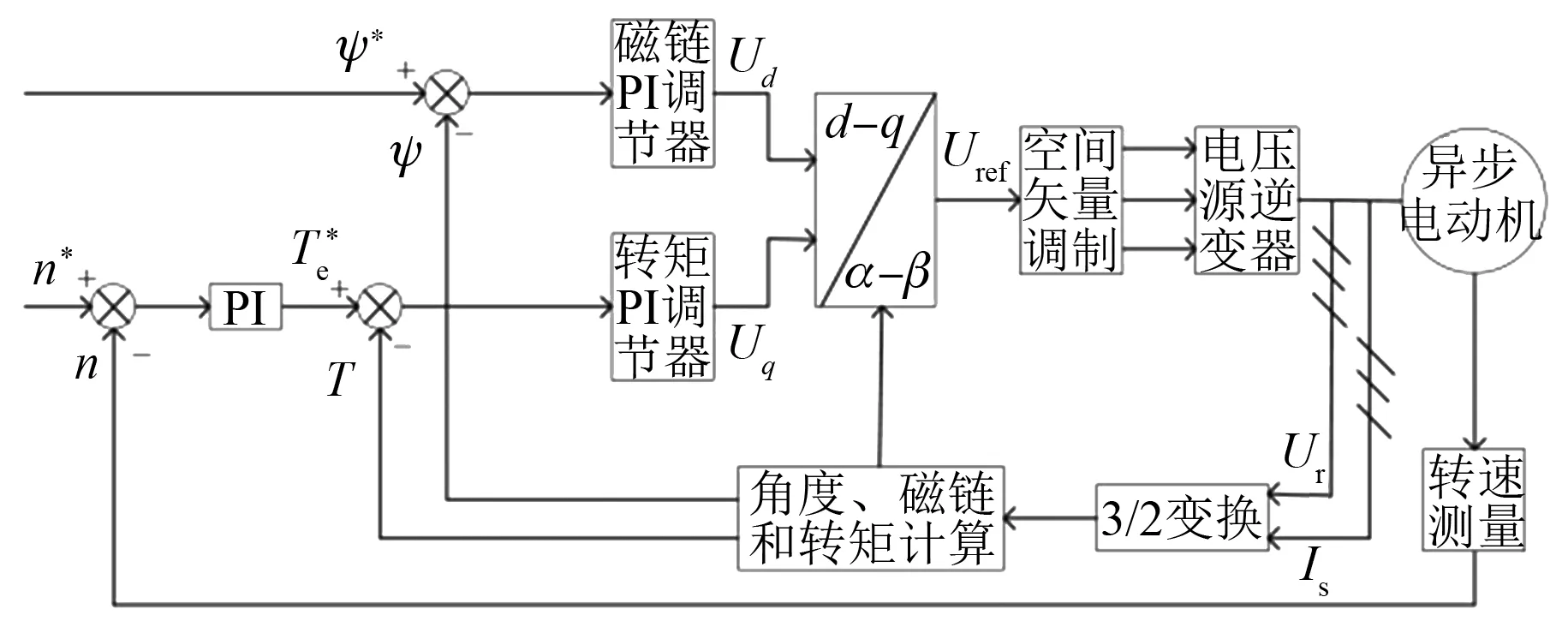
图3 单电机DTC-SVM结构
2.1 单逆变器驱动并联异步电机模型
由单逆变器供电的双感应电机如图4所示,逆变器为双并联电机提供相同频率和幅值的电压。但由同一转向架下并联的异步电机所分别驱动的动轮轮径差异等原因导致双并联异步电机间负载不平衡,会引起双感应电动机的转速和定子电流不同。通常情况下,并联异步牵引电机的参数基本相同,因此可以忽略这2台电机的参数差异。

图4 同一转向架下双电机并联的电流模型
2.2 基于平均DTC-SVM的并联电机驱动系统
在基于平均DTC-SVM系统中,将2台并联异步电机采用平均化理论拟合为1台电机进行控制。要实现DTC-SVM,首先要精确地估算出磁链和转矩,然后将结果输入到对应的磁链和转矩PI调节器中,通过磁链当前所属的位置来最终确定逆变器输出的电压空间矢量。
在两相静止坐标系下,通过容易测得的定子电压和定子电流来计算定子磁链,即
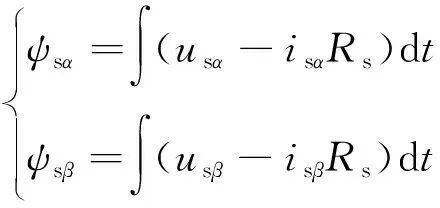
(9)
电磁转矩可通过式(10)进行观测:
Te=p(ψsαisβ-ψsβisα)
(10)
式中:p为电机极对数。
根据式(9)、式(10)单电机的定子磁链和电磁转矩观测计算方程写出电机并联运行时的方程,如式(11)、式(12)所示:

(11)

(12)
将式(11)进行平均和差分处理后可以得到:

(13)
且有:
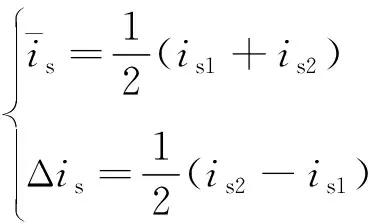
(14)
在对地铁双电机并联驱动系统进行控制时,平均转矩利用差值公式(15)进行计算:

(15)
可以得到平均转矩计算公式:

(16)
2.3 基于加权DTC-SVM的并联电机驱动系统
上述方法是通过对定子电流和磁场进行平均,来计算需要输入到转矩闭环PI控制器中的转矩,虽然可以实现双电机的并联DTC,但在重度负载不均衡时,控制效果不太理想,转矩波动较大,电机间输出转矩差较大,转矩较大的电机甚至可能发生颠覆。为了改善控制性能,本文在原平均DTC方法上引入加权系数km,根据实际运行情况来动态调节加权系数。

图5 单逆变器驱动的并联电机加权定子磁链模型
在两相静止坐标系下,定子电流和定子磁链的加权值和差值定义如下:
(17)

(18)
加权平均差值计算公式如式(19)所示:

(19)
令:

(20)
运用加权差值计算公式可以得到估算加权平均磁链和转矩的方程:
(21)

(22)
2.4 加权值的选取
基于地铁列车实际运行时两并联电机的机械耦合并考虑到黏着时两并联电机等效负载转矩的相关性,本文将前文计算出各电机等效负载转矩的TL1和TL2作为加权值计算的参数。
加权值计算公式如下:
(23)
3 系统控制框图
地铁双异步牵引电机并联加权DTC系统框图如图6所示,将两并联牵引电机在地铁同一转向架负载模型下运行时得到的定子电流和磁链作为加权直接转矩的输入,得到加权平均的转矩和磁链,与给定的转矩和磁链进行比较,得到的误差经过PI调节器得到dq轴坐标系下的参考电压空间矢量,经过坐标变换到αβ轴,得到参考电压矢量Uref,最后,通过SVM得到逆变器的开关信号,驱动电机运行。
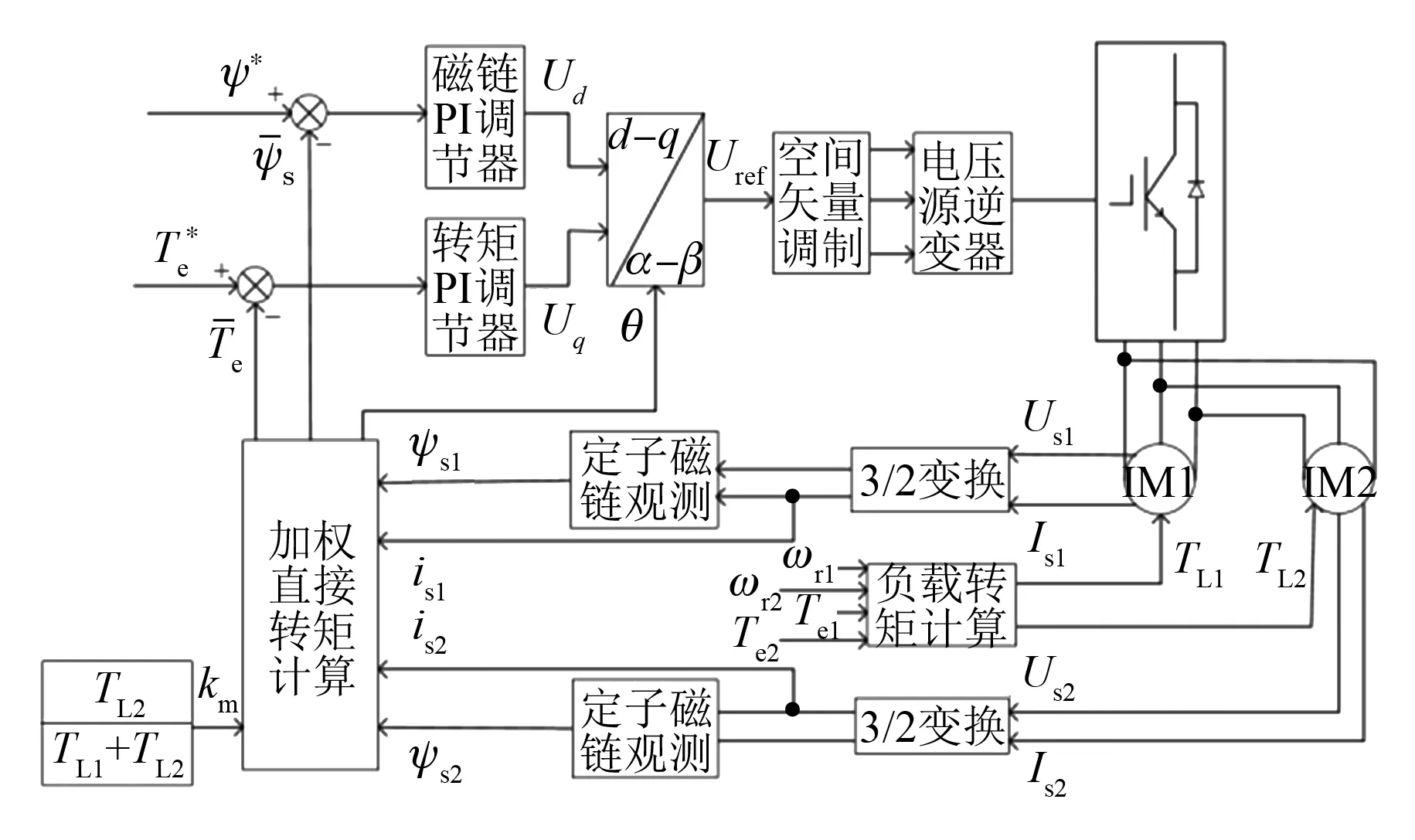
图6 双异步电机并联加权DTC系统框图
4 仿真研究
利用MATLAB/Simulink仿真工具,对上文的控制策略进行仿真研究,采用北京地铁13号线车辆的实际参数进行建模与仿真。参数见表1,动拖比为1…1,为了简化模型,忽略列车运行时的轴重转移,假设每个动轴所承担的车重相同。

表1 仿真参数
对同一转向架下双动轴负载不平衡程度较大(即轮径差较大)时2种方法进行对比,设置r1=0.41 m,r2=0.39 m。图7和图8分别为采用平均DTC和加权DTC得到的2台电机转矩、转速特性以及转矩差曲线。通过仿真结果可以证明本文建立的同一转向架下速度耦合的双并联电机等效负载模型和转矩开环控制模型是正确的。通过对比可以看出,在负载不均衡程度较大时,平均DTC系统的转矩脉动较大,且2台电机的转矩差大大超过加权DTC。较大的转矩脉动影响地铁列车运行的稳定性和乘坐的舒适性;较大的转矩差会使负载较大的电机因电流较大而过热,还有可能导致黏着状态遭到破坏,发生空转。因此,本文所应用的加权DTC方法可以在一定程度上减小转矩脉动,并减小两并联电机的转矩差,提高地铁电机并联运行时的控制效果。

图7 平均DTC-SVM的并联电机控制

图8 加权DTC-SVM的并联电机控制
5 结 语
本文建立了地铁列车同一转向架下双动轴模型来模拟车体实际运行中各电机的负载转矩,结合北京地铁13号线实车数据,并在双电机单逆变器平均DTC的基础上推导出加权DTC方法,通过实时计算的加权值来实现同一转向架下双并联电机的动态控制。仿真结果表明,采用加权DTC方法改善了地铁电机并联运行时的控制性能,减小了转矩脉动,降低了因轮径差等原因导致的不平衡负载下的转矩差。
