城市轨道车厢人数检测传感器布设优化模型
2021-11-22戚子玥施子逸周庆泽邵春福
戚子玥,施子逸,周庆泽,邵春福
(1.北京交通大学交通运输学院,北京 100044;2.北京交通大学电子信息工程学院,北京 100044)
0 引言
城市轨道交通线路网逐渐完善,带来了巨大的经济和社会效益,但随之而来的高密度客流带来了新的问题,地铁各车厢人数的不均衡分布限制了地铁运力传递和平稳运行,影响乘客舒适性,也不利于疫情防控.对地铁车厢内人数进行监测与显示,利于乘客选择最合适的车厢,保持各节车厢人数的动态平衡.为此,2020年1月西安地铁已经推出车厢拥挤度智能化显示屏,用三色区分拥挤度,北京也已投入研发地铁满载率显示,本研究同样致力于车厢内拥挤度检测技术的完善.
现有利用图像识别技术[1]结合地铁站台显示屏进行车厢人数的实时发布,并有学者引入Yolo3人数统计算法提高精度[2],同时也有学者提出运用RFID技术进行车厢内人数的统计.然而,图像识别或者红外感应技术存在随着客流强度增大精度变低的问题,并且易发生遮挡现象;RFID技术经济性较低,维修耗费高.引入压力传感器测量人数更加经济且便于维修更换.
目前传感器用于压力源的测定方法相对成熟[3],利用有效独立法、启发式算法等可有效提高检测精度,但仅限于健康监测领域[4-6],缺乏在降低成本、优化布局方面的研究.在特定场合下如地铁车厢中的布局成本,仍然存在可降低的空间.另一方面,现有对人数检测的模型中,忽略了人数分布的规律,而基于大量的历史数据,可有效考虑到地铁车厢中人数分布的特征.在对地铁站台和车厢内乘客大数据分析的基础上,本研究基于压力传感器的检测装置布设和检测精度优化的双层规划模型以获取最优布设方案.
1 检测装置
考虑到现有集成传感器价格较高且误差不可控,不利于推广,首先根据实际情况设计传感器基本单元,并仿真验证该检测思路的可行性.在此基础上建立车厢离散化模型.
1.1 检测装置的设计
为确定使用传感器的量程,考虑到实际情况下人体相关尺寸,假设人重60 kg,双脚面积为200 cm2,造成的压强计算如式(1)所示,并为压力传感器所能承受的最大量程.
(1)
保持坐姿时,假设人是一个密度均匀的圆柱体,座椅支撑了上身的重量,地面支撑了膝关节及以下的重量,根据相应占比计算压强. 另外,通过查阅资料得到公共场合的用椅高度多为0.55 m. 可推算出此时造成的压强如式(2)所示,并为压力传感器能感知的最小压强.
(2)
通过调查,现有量程为0~100 kPa的传感器可满足上述量程要求,但是成本相对较高.
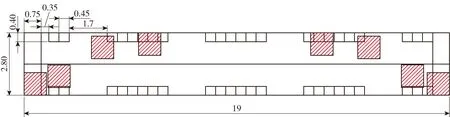
设计了一种基于压力传感器的基本检测装置,包括承载平台、安装板、支撑柱和压力传感器.首先将车厢划分为多个基本单元(unit),每个基本单元的组成如图1所示,整个车厢底部可划分为多个基本单元,各个单元间相对独立.
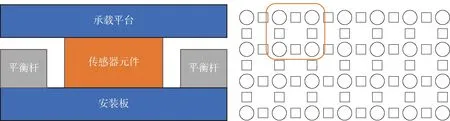
图1 传感器单元基本组成与基本布设形式
压力传感器布设于安装板的表面,同时设有多个支撑承载平台的支柱.支撑柱内部可采用弹簧等抗压材料构成.传感器与内部处理器之间进行电连接,用处理器来接受分析多个传感器所采集的信息.
如果采用单只传感器,其中的敏感元件应变片会因为人所在的位置产生形变不均匀、不对称,从而使同一被称的人因为所在位置不一致而产生不同的输出电压,也就是压偏载.因此需要将4个传感器放置于4角,同时输出端采取串联的方式,输出的电压是相互叠加的.为了满足量程为1 000 kg/m2,需要4个250 kg量程的传感器.最后,还需要一个加法器将各传感器的输出电压进行累加然后输出到单片机中,进行数据分析处理.
利用传感器传输压力的过程为先运用传感器获取信息,然后将信号放大,实现模数转化,并通过微处理器进行处理,最后进行即时显示.系统使用到的元件有:型号为H3-250kg的压力传感器、若干个电阻、若干个电容、滑动变阻器、AD转换元件、运放AD8072、LM324AD.
1.2 检测装置的仿真
对传感器来进行模拟仿真证明该检测装置的可行性.通过电路仿真,实现由压力传感器感受被测物体的质量,通过电桥输出电压信号,通过放大电路将输出信号放大,如图2所示.
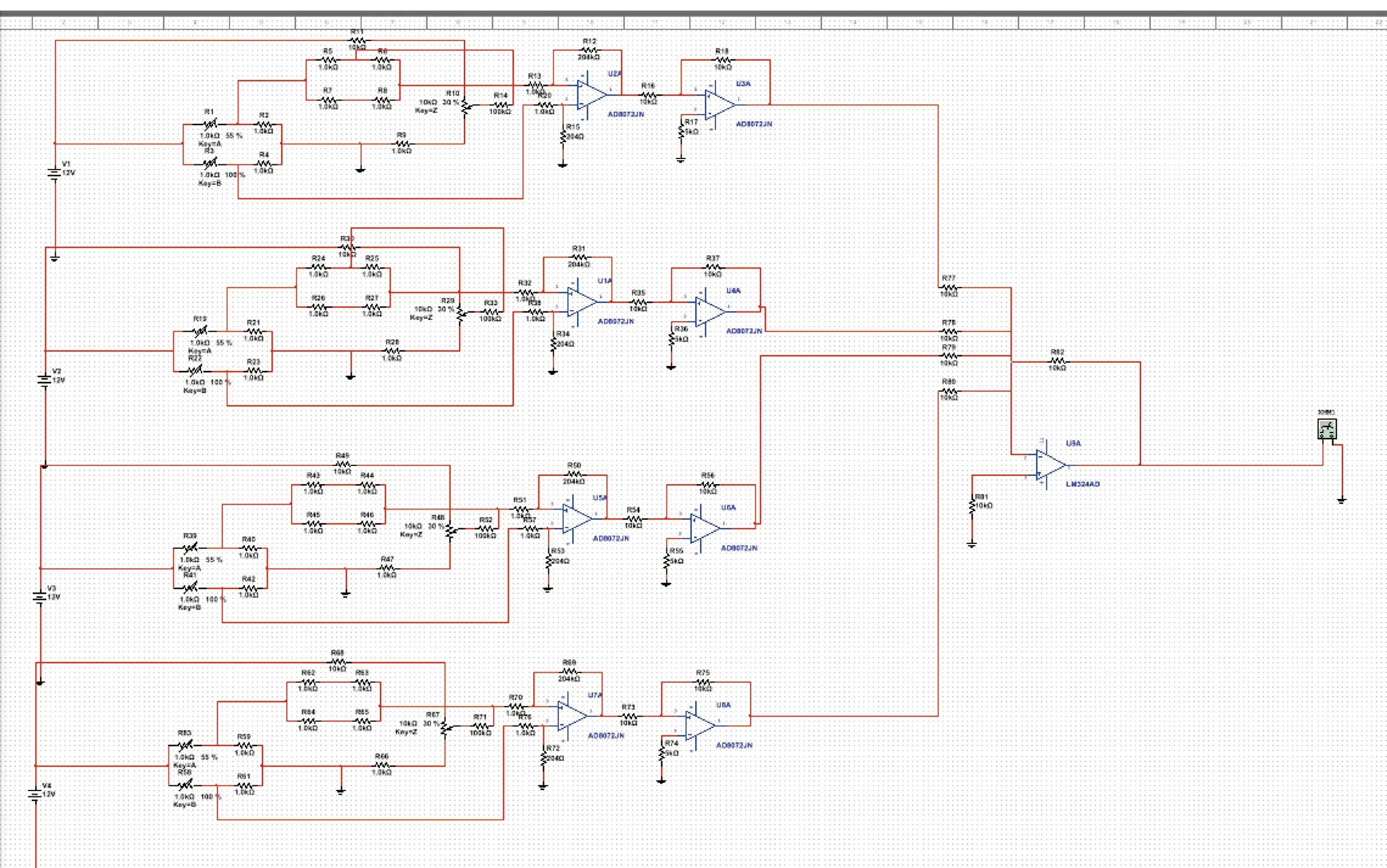
图2 仿真总电路
通过更改传感器电阻测量其电桥的输出端的输出电压,并对其进行拟合,发现在300~1 000 Ω范围内传感器电阻与输出电压成线性变换的,证明电路特性良好.同时,根据实际需要进行测量时可选择该电阻部分设计,良好的线性关系便于后续工作的开展.
2 检测装置布局优化模型
在建模过程中,首先将车厢内部离散化为网格,一个传感器检测装置将占据若干个小方格. 建立传感器布局的双层优化模型,上层优化传感器的布设位置和数量,下层通过拟合得到传感器检测人数与实际人数的最优数学关系,用权重向量w和偏置项β对其进行描述.
2.1 上层模型
为了计算出每一个区域传感器覆盖到的人数,首先需要建立车厢模型并将其离散化.

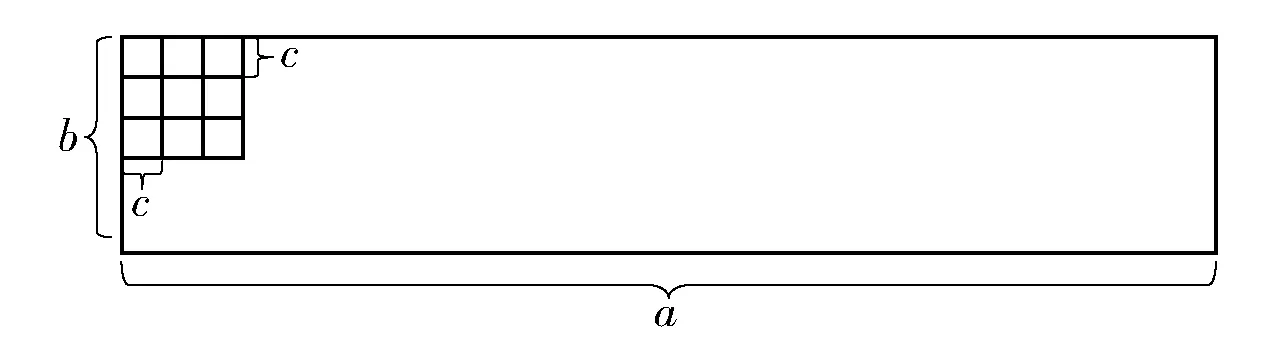
图3 离散化参数示意图
(3)
式中,i为任意1个传感器检测到的总人数;nj为任意1个单元上的人数.
由于将该问题转化为了总人数与各传感器检测人数的关系问题,因此评价指标选用统计学中的平均绝对误差(MAE),具体计算如式(4)所示.
(4)
式中,yi为第i个样本的实际车厢总人数;i为第i个样本通过回归计算得到的车厢总人数;n为测试样本总量.
综合以上内容,构建整体车厢内传感器布局的模型如式(5)~(10)所示.
(5)
式中,n为测试样本总量;N为假定使用的传感器数量;ti为0/1变量,表示是否采用该编号的传感器;yi为对于第i个样本的实际车厢人数;i为对于第i个样本通过传感器之间的关系得出的估计车厢人数;f(xi)为采用方法建立某种回归关系;xij为对于第i个样本编号为j的传感器可检测到的人数;w为权重向量,β为偏置项,φ(x)为某种映射函数,当下层考虑线性关系时,φ(x)=x,考虑非线性关系时,φ(x)为一个将x映射到高维空间的核函数;Nim为对于第i个样本,第m个单元上实际的乘客数量;为传感器检测的单元格数量;为整个车厢范围内单元的数量.
2.2 下层模型
下层模型是通过上层模型中f(x)表征的某一计算方法的最优精度,保证传感器的编号位于车厢总共的单元范围以内,得到该组传感器布局的最优结果. 权重向量w和β偏置项为下层模型的决策变量,并传递至上层参与运算.
假设传感器与最终人数呈线性关系时,下层模型如式(11)~(13)所示.
(11)
式中,w为权重向量,β为偏置项,这两者为该模型下的决策变量;yi为样本真实值;y表示预测值;xi表示单个传感器向系统输入的人数;m表示使用样本个数;n表示使用传感器个数.
假设传感器与最终人数呈非线性关系时,下层模型如式(14)~(18)所示.
(14)

该问题涉及上层寻优与下层寻优. 先对下层进行寻优,再将优化得到的w和β为偏置项传入上层模型进行优化. 下层寻优采用多元线性回归算法与支持向量机算法对比,上层优化将采用改进的人工鱼群算法与粒子群算法进行对比.
2.3 拥挤度等级划分
车厢拥挤度相比于人数是对车厢拥挤情况更直观的划分.该标准考虑乘客的舒适性与安全性,并允许检测得到的人数在一定误差范围内.在城市交通规划设计中,常用的指标为立席密度.立席密度为有效单位立席面积(减去坐席面积)的乘客数,单位为人/m2.根据《城市轨道交通工程设计规范》(DB11995—2013),地铁定员的标准为6人/m2,超员的标准为9人/m2,结合实地考察得出的地铁面积,其一节车厢的立席面积约为44.92 m2.[7-8]以立席密度为依据,将车厢的拥挤程度划分为舒适、适中、拥挤、满载4个等级,如表1所示.
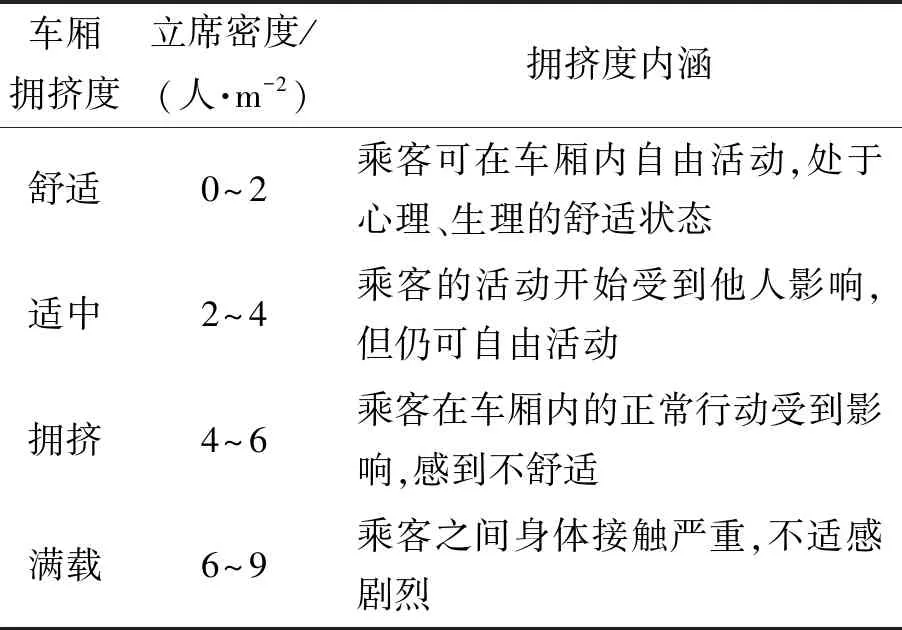
表1 车厢拥挤度划分标准
根据立席密度,可计算得出不同车厢拥挤度下的立席人数.
此时,对原模型进行修改,将目标函数式(5)修改为式(19).
(19)
式中,gi为第i个样本的实际拥挤度等级,其值可取1、2、3、4,分别表示舒适、适中、拥挤、满载的车厢拥挤度.i为第i个样本的估计拥挤度等级.
在原模型中加入人数与拥挤程度的转换约束式(20).
(20)
式中,yi为车厢的人数;S为车厢立席面积.
3 模型求解
3.1 下层求解
下层优化问题主要是针对某种传感器布局下对其最小估计误差进行计算,因此主要是得到某组解的目标函数值,此处的目标函数选用之前的MAPE(平均误差).针对线形与非线形的情况分别尝试了多元回归方法与支持向量机回归方法.交叉验证改进的支持向量机.支持向量机(supprot vector machine,SVM)是一种通过构建最佳决策平面或划分线来讲样本分割开来的学习算法,对于存在线性关系的数据集,一般通过距离公式及样本假设来求SVM的最佳线性方程,处理非线性关系的问题,则会引入核函数(kernel function)来对数据进行维度转换,从而在高维度空间内进行线性划分.基于MATLB的libsvm软件包来构建SVM回归模型.
由于测试的数据集本身获取难度较大,且各个传感器之间获得的数据关系错综复杂,因此引入支持向量机(SVM)的方法可有效解决样本少、非线性、高维度的问题.未了尽量解决样本少的问题,通过引入了高斯径向基函数,并且通过交叉验证的方法确定了核函数参数g和惩罚因子C来提高精度.[9-11]具体操作如下:
步骤1设置惩罚因子C和核函数g的优选范围Cmin,Cmax,gmin,gmax,及其变化步长.
步骤2将训练集随机分为n份,令C=Cmin,g=gmin,k=1,i=1.
步骤3取第i组为验证集,其他组作为训练集.
步骤4计算训练后的验证集上的损失函数εi.
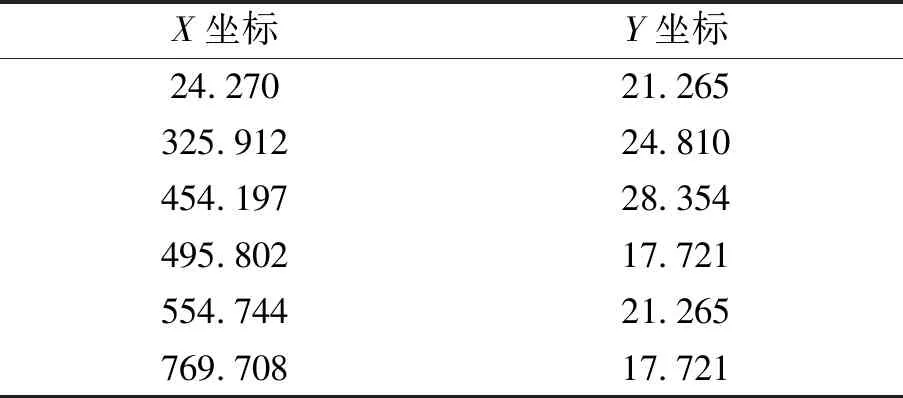
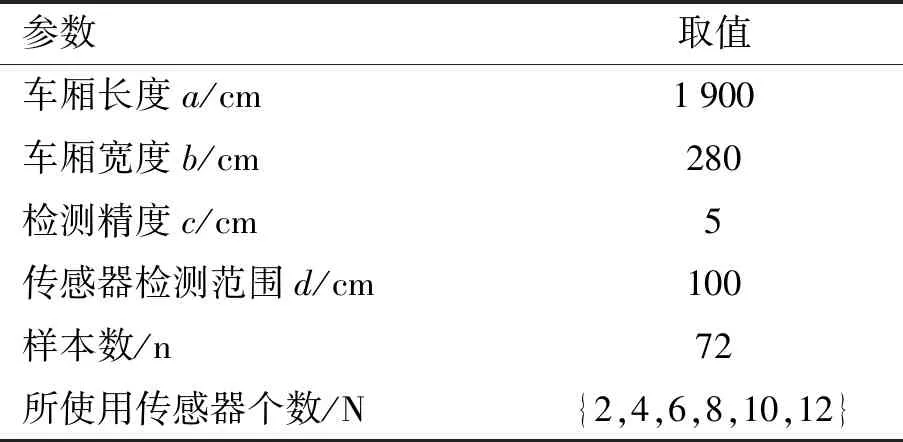
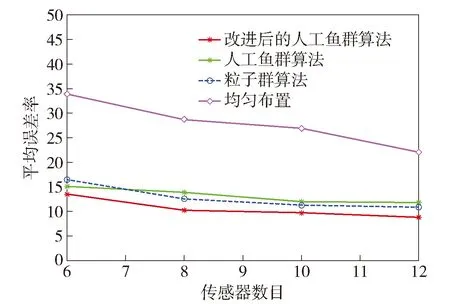
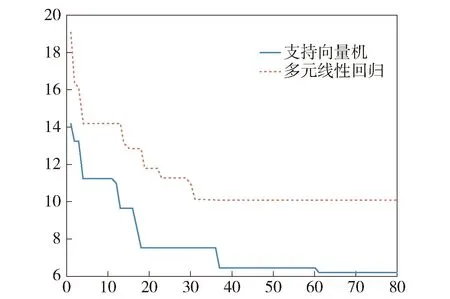
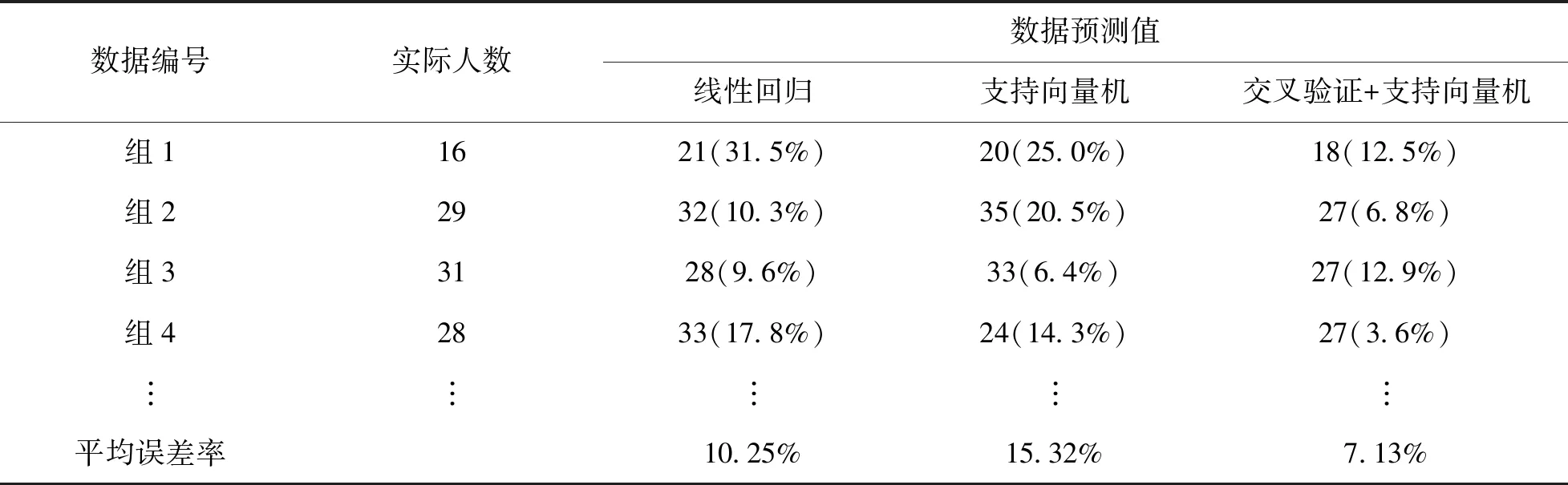
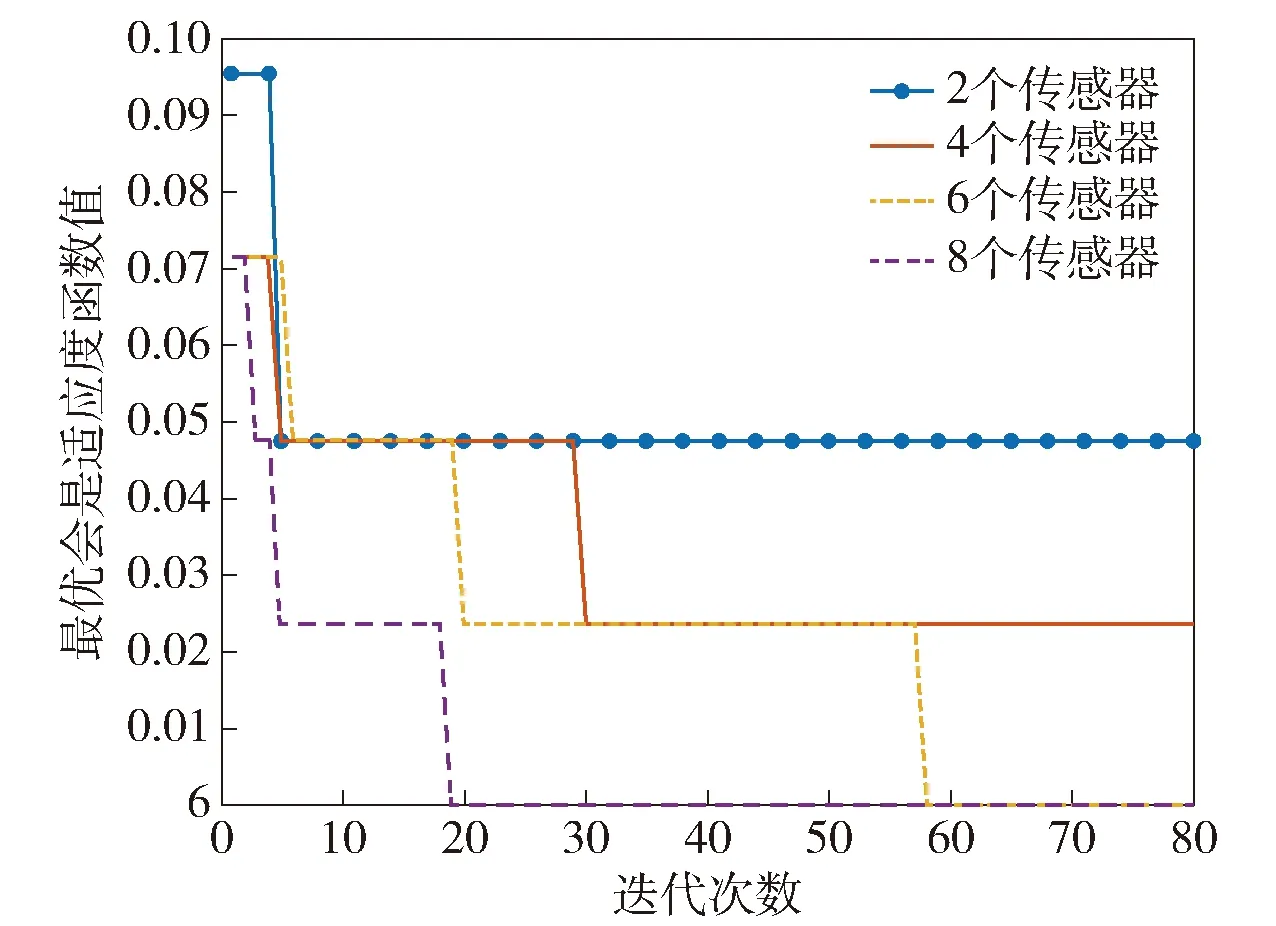
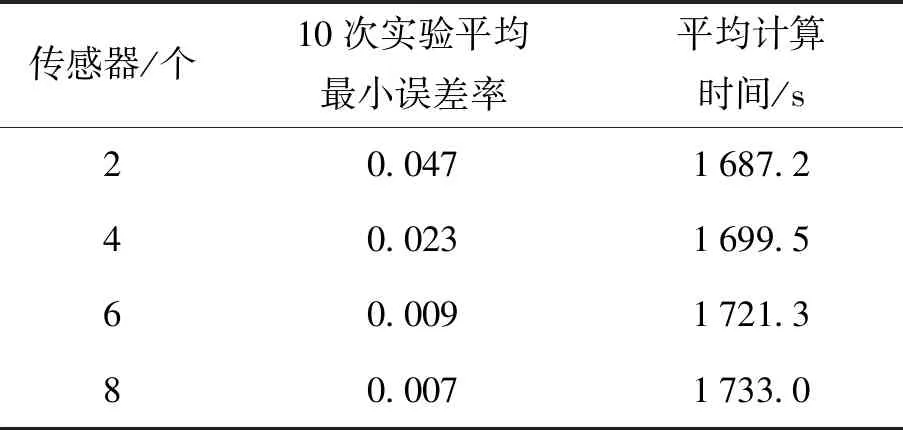
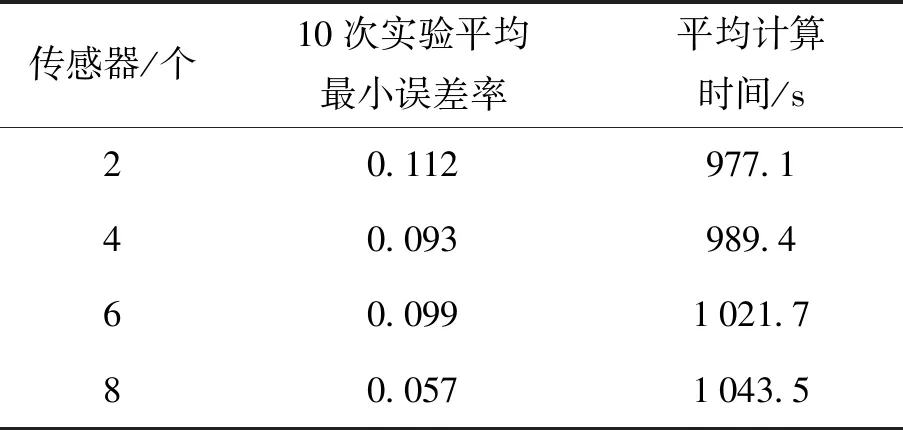
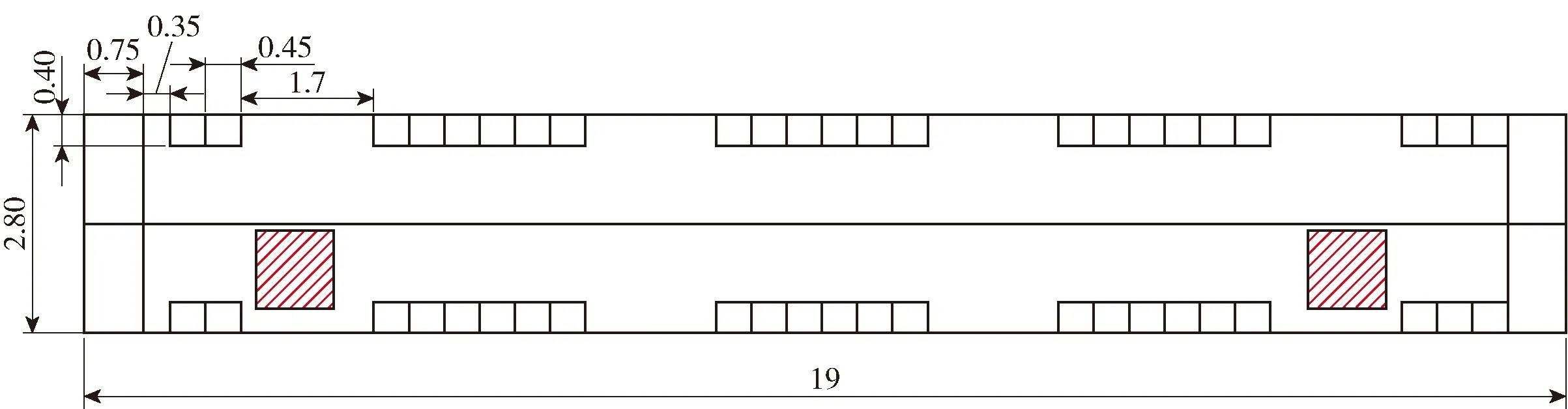
步骤5令i=i+1,若i 步骤7在计算出的损失误差Lk中选择最小值,其对应的超参数作为最优参数在整个训练集上重新训练. 上层优化主要完成传感器布置位置模型的求解,此处引入改进的人工鱼群算法. 3.2.1 编码方式改进 进行算法求解首先需要建立与传感器布局一一对应的编码方式,在车厢离散化的基础上建立车厢单元格二维编码体系,由于单个传感器的尺寸可被离散的单元格整除,因此可用传感器最左下角单元格的二维坐标表示某一传感器的布局位置. 因此,可用1条人工鱼表示某1组解,人工鱼表示X(x11,x12,x21,x22,…,xM1,xM2),M表示共使用M组传感器. 由于传感器布置位置受到车厢长度的限制,因此解具有上下界,分别令其为ub与lb,均为向量形式,与X维度相同. 则生成初始人工鱼的具体步骤如下: 步骤1完成各个布设位置的二维编码. 步骤2根据X=rand*(ub-lb)+lb生成1组初始解. 步骤3对X的各个分量的具体值进行四舍五入得到整数. 需要注意的是,在初始化过程,或者之后的每次觅食或者追尾行动之后,X有可能出现非整数、重复、超出界限的情况. 针对非整数的值,将其进行四舍五入取整,针对超出界限的情况,其值被相差最近的界限值所取代. 针对重复的情况,将重复的值剔除,随后在剩余的位置中随机选取直至不再有重复. 3.2.2 距离计算方式改进 现有的距离衡量公式大多基于解的二级范数,但是在传感器问题上,无法仅仅用对应解中位置的传感器的距离差来确定两组解的距离差,此处对其距离公式进行了改进. 求出了2组传感器布设方案之间,对每个传感器与另1组解中距其最近的传感器之间的距离进行求和,得出2组解之间的距离. D(Xi,Xj)=d1+d2+…dM (21) dm=min (xmn) (22) 式中,Xi,Xj表示2组解,dm为第i组解中第m个传感器与第j组解中的距其最近的传感器的距离. 选用属于6B规格的北京二号线地铁车厢进行调查,绘制编码用车厢的平面图.通过调查可得到车厢人数分布数据与车厢尺寸各参数的取值.共采集80组数据,剔除存在遮挡等无效数据后得到照片72组,将乘客的位置分布按照人体的比例以红点的形式点表示于车厢平面图4.随后可将各个车厢内的乘客的坐标信息保存. 图4 将人数点在车厢平面图中 将各组的图片数据导入MATLAB中,运用其中ginput的指令,将其中的红点坐标读出,这样就可得到各组数据中的人员坐标数据,存到名为data的一个元胞数组中,其中每一个元胞内包含了一组车厢内的坐标信息,具体格式如表2所示.由于主要对车厢的半侧进行分析研究,因此横坐标X的取值范围为(0,950),纵坐标Y的取值范围为(0,280). 表2 人数点存储方式 模型中的参数设置见表3.结合实际确定5×5 cm的方格为该问题的检测精度,在此精度下将车厢分为190×56=10 640个基本单元,将上述的坐标信息转化为每个基本单元上的人数. 表3 数值计算中的参数设置 选用检测范围为100×100 cm的自行设计的传感器,一个传感器可覆盖20×20=400个基本单元,将问题转化为在特定布设下各传感器的检测人数与该车厢的总人数之间回归问题. 4.3.1 不同传感器数量对比 运用改进的人工鱼群算法,分别对传感器数目为6、8、10、12进行求解,求解10次,将各平均误差率互相对比,绘制折线图如图5所示.利用算法进行优化之后的布设方式比均匀分布的误差率降低明显.而在这些算法中,改进后的人工鱼群算法的误差率最低,表明了在算法选择上的正确性. 图5 不同方案与算法平均误差率对比曲线 同时,由图5可知,随着传感器数目的增加,线性回归的检测准确率也在提升.但是在传感器数目增加为8后,准确率提升的速度缓慢.绘制传感器布局图,将通过改进后的人工鱼群算法得到的布局方案直观呈现出来,以10个传感器为例,发现在使用10个传感器进行布设的时候,检测区域重合的情况较为严重. 综合考虑基于线性回归的方法下得到的传感器布局方案,认为使用8个传感器的布设方案最优,后续也主要在8个传感器的使用数目上进行拟合优化. 4.3.2 线性与非线性计算方式对比 由于支持向量机适合于解决样本少、维度高、非线性的问题,采用支持向量机来进一步挖掘传感器检测到的各区域人数与该节车厢内的总人数之间的关系.由上文可得,在未对下层进行优化时,传感器数量为8个/车厢可达到最优精度.本文将传感器个数设置为8个进行实验,并在特定传感器的解下运用交叉验证的方法确定最优的支持向量机的参数C与g.经过80次的迭代,得到最优解的坐标表示为(172,1),(110,34),(68,37),(149,8),布设方式见图6,其最小的平均误差率为7.13%.支持向量机与多元线性回归两者迭代曲线进行对比,如图7所示,可发现通过支持向量机求得回归结果比线性情况下误差显著降低,收敛的效率也更高. 图6 支持向量机求解得到8个传感器布设方式 图7 两种方法适应度曲线 为了得到传感器的具体误差,绘制了训练集与测试集的对比曲线.支持向量机的回归,使其可基本掌握训练集中各传感器检测结果的数据关系,并且在测试集中可看出效果良好.并将引入交叉验证后的结果列表对比,由表4可见:交叉验证有效提高了检测的准确性,且交叉验证的支持向量机优于线性拟合的结果.因此认为非线性模型对各传感器检测人数与总人数之间关系的描述更加准确. 表4 两种方法预测结果与真实结果比较表 4.3.3 拥挤度计算结果 引入拥挤度概念主要是为了尽可能在保证精度的基础上降低成本,因此分别令传感器个数为2个、4个、6个、8个,依然采用改进人工鱼群算法进行求解,绘制迭代曲线如图8所示,并将的最佳精度与求解时间汇总如表5和表6所示. 图8 SVM误差率迭代曲线 通过表5与表6最小误差率的对比可见,非线性的检测关系,更加适用于拥挤度检测的情况.经计算最少采用2个传感器,可将检测拥挤度的误差率控制在5%以内,其布置的坐标为(125,6),布设位置见图9,传感器的位置在车门附近,对人数的变化较为敏感,与常识相符.采用6个以上传感器进行布置,在实验中可将预测的误差率可控制在1%以内.可见,拥挤度划分的准确率显著高于人数检测. 表5 SVM计算结果 表6 线形回归算法计算结果 图9 2个传感器布设方式 通过应用场景、构建模型和求解算法研究了城市轨道交通车厢人员感知检测问题,将传感器检测人数问题转化为运筹优化问题,为降低成本,对传感器基本单元进行设计,并进行仿真证明其可行性;构建了双层规划模型,上层为对传感器的布设进行优化,下层为对确定传感器布局下测量值准确度优化,并考虑了线性与非线性关系的2种情况;算法方面,改进了人工鱼群算法,并将其与交叉验证的支持向量机相结合. 通过北京地铁2号线实测数据进行模拟分析,验证了该传感器优化布设方法较其他方法的优势.结果表明,当每节车厢使用的传感器数目为8个时,人数计算平均误差最小为7.13%,半节车厢内的传感器坐标为(172,1)(110,34)(68,37)(149,8);拥挤度计算误差最小可达0.7%,可实现4个拥挤等级下的准确判断.结果证实了该布设优化模型在实际情况下的可靠性与该算法求解的稳定性,同时拥挤度的误差小于人数的误差也符合预期. 检测人数的实时反馈,有利于建立乘客车厢引导系统,实现各车厢人数的动态平衡,提高地铁运力.由于本研究在数据采集时未对车厢内拥挤和空闲的情况进行区分,而这2种情况下乘客在车厢内的分布特征可能会存在差别,后续的研究将进一步完善布局优化模型.
3.2 上层求解
4 数据分析
4.1 数据采集

4.2 参数设置
4.3 求解结果
5 结束语
