气动3-UPU机器人的神经网络监督控制仿真
2021-11-19赵国新张立业
刘 昱,彭 锋,赵国新,张立业
(北京石油化工学院信息工程学院,北京 102617)
1 引言
并联机器人具有精度高、动态响应好、刚度高和承载能力大等优点,在无需很大工作空间的领域内得到广泛应用。1978年,Hunt[1]首次提出把六自由度并联机构作为机器人操作器,并联机器人才逐渐引起了人们广泛注意。在国内,1991年燕山大学黄真教授[2]研制出第一台六自由度并联机器人样机。郑相周等[3]根据纯转动型3-UPU并联机构的几何特点,使用单位四元数变换求出其双正交条件下的8个封闭的位置正解。梁伟文[4]提出了纯转动型3-UPU并联机构的工作空间搜寻算法,并验证了该算法的有效性。由于气动比例位置系统具有价格低、维护方便、安全无污染等特点,使其迅速在并联机器人领域内得到应用[5]。Richardson等[6]围绕关节空间极点位置控制器介绍了一种用于气动机器人的阻抗控制器,并成功实施在机器人上。王飞等[7]采用状态控制器对气动位置伺服系统进行控制,相比PID控制器,其控制精度更高、更稳定。陈平等[8]采用鲁棒自适应PD控制算法对气动并联机器人进行了优化控制。
RBF神经网络具有自学习和自适应能力,侯波等[9]将改进的神经网络监督控制器应用到液压舵机伺服系统中,具有良好的控制效果和较强的鲁棒性。孟庆爱等[10]针对火箭炮位置伺服系统构建了基于传统PID控制的RBF神经网络监督控制器,仿真结果表明该控制策略可以有效提高系统的控制品质。Cheng J等[11]设计了基于RBF神经网络的无刷直流电机控制系统,仿真结果表明该方法提高了系统的自适应能力和抗干扰能力。
本文采用solidedge软件设计3-UPU并联机器人物理模型,根据该机构几何关系推导其运动学方程并基于数值解法得到了该机构的工作空间,同时针对该机器人的气动比例位置系统设计了RBF神经网络监督控制器。仿真结果表明,该机构有较大的工作空间,同时对于该机器人的气动比例位置系统,相比于传统PID,RBF神经网络监督控制器具有更优的控制效果。
2 机器人建模与分析
2.1 3-UPU机器人物理建模
采用三维建模软件设计3-UPU并联机构物理模型,如图1所示,该机构三条相同支链采用无摩擦气缸[12],其动平台和静平台均为正三角形,三条相同支链的两端分别连接到虎克铰的一侧,虎克铰的另一侧通过几何约束对称连接到两个平台的三角形顶点。其中U代表虎克铰,通过它使两关节之间具有两个独立的相对转动,具有两个转动的自由度。P代表3-UPU 并联机器人移动副,它允许两构件沿公共轴线作相对直线运动。

图1 3-UPU并联机构模型
2.2 系统运动学正逆解
3-UPU并联机构的运动简图如图2所示,静平台为正三角形A1A2A3,其所在的外接圆圆心为O0,半径为R,支链依次为Pi(i=1,2,3),其中Ai(i=1,2,3)依次为三条支链的上顶点。建立绝对坐标系O0x0y0,x0轴正方向由O0指向A2,z0轴正方向垂直于平面A1A2A3向下,在绝对坐标系下Ai(i=1,2,3)的坐标分别为

图2 3-UPU并联机构的运动简图
A2(R,0,0)
动平台为正三角形M1M2M3,其所在的外接圆圆心为O,半径为r,其中Mi(i=1,2,3)依次为三条支链的下顶点。建立局部坐标系Oxyz,x轴正方向由O指向M2,z轴正方向垂直于平面M1M2M3向下,在绝对坐标系Oxyz下Mi(i=1,2,3)的坐标分别为
M2(r,0,0)
根据该机构的几何特点,运用矢量法,有下面的矢量方程
AiMi=-O0Ai+O0O+OMi,(i=1,2,3)
(1)
|AiMi|=li,(i=1,2,3)
(2)
式中,li(i=1,2,3)表示第i个支链的长度。如果设O点的绝对坐标为(x,y,z),则O0O可以表示为
O0O=[xyz]T
(3)
O0Ai表示为
O0A2=[R0 0]T
(4)
OMi表示为
OM2=[r0 0]T
(5)
令Δ=R-r
所以得到机构的运动学逆解
(6)
进一步得到机构的运动学正解
(7)
2.3 系统工作空间分析
根据实际支链长度采用遍历法得到满足机构约束条件的所有坐标点集并可视化显示,从而得到该机构的工作空间。
已知支链采用的气浮无摩擦缸最小长度lmin=420mm,最大长度lmax=720mm,则各支链长度li(i=1,2,3)满足关系式
lmin≤li≤lmax
根据该机构装配关系可知,当其处于初始位置时,支链初始长度l0=570mm,支链与静平台初始夹角θ0=45°,可以求解出Δ=403.05 mm,通过MATLAB软件仿真计算得到3-UPU并联机构工作空间,如图3(a)所示,其在xy平面的投影如图3(b)所示,工作空间为帽子形,空间边界曲线连续且光滑。

图3 3-UPU工作空间
工作空间分布见表1,其动平台在x,y,z方向最大位移均接近0.5 m。
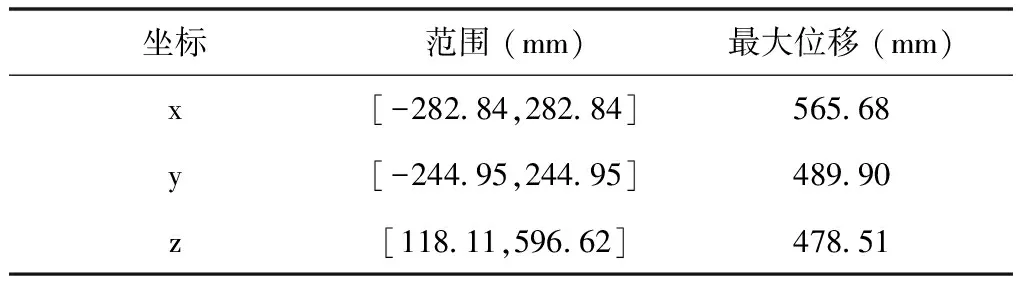
表1 工作空间分布
2.4 气动比例位置系统数学建模
基于气浮无摩擦缸驱动的3-UPU并联机器人通过联合控制三个单轴气动比例位置系统来实现动平台在空间中的运动,所以该气动比例位置系统成为实现机器人各性能指标的关键部分和控制策略的主要研究对象。
该系统的基本原理是通过计算机控制软件、比例阀、气缸的调节作用,使比例阀输入信号电压ue与位移传感器采集的气缸位移反馈信号uf之差Δu趋于零,从而实现气缸位移对输入信号的跟踪。为了简化其数学模型,作如下假设[13]:①所有工作介质为理想气体,满足气体方程;②气体流过阀口或其它节流孔时的流动状态为等熵绝热过程;③在动态过程中各参量的变化仅是一个微小量(小扰动假设)。
2.4.1 比例阀模型
以德国FESTO公司MPYE-5型三位五通比例流量阀为研究对象。该阀属于电压型控制阀,比例阀中位电压为5V,当信号电流通过线圈时,线圈上产生的电磁力推动阀芯运动来调节阀的开度,而电流的大小又由输入电压信号与反馈信号比较得到。
控制线圈的电压平衡方程为
(8)
其中,ku为放大器增益,ug为输入放大器的信号电压,Rc为控制线圈电阻,rp为放大器内阻,Lc为控制线圈电感,ic为线圈电流,Kb为线圈的反电动势常数,Kb=BgπDNc。设ufk=Kfkx为反馈电压,其中Kfk为传感器增益,则
ug=ue-ufk=ue-Kfkx
(9)
其中,ue为比例阀的输入电压。
电流通过线圈时产生的电磁力为
F=BgπDNcic=Ktic
(10)
其中,Bg为磁感应强度,Nc为控制线圈的匝数,Kt为电磁力系数,Kt=BgπDNc。
若忽略线圈组件上的负载力,则
(11)
m为线圈组件的质量,B为线圈组件的阻尼系数,联立式(8)(9)(10)(11)并进行拉氏变换得电-气比例阀的传递函数为
(12)
式中,w0为比例阀的固有频率,ζ0为比例阀的阻尼比。
2.4.2 阀控缸模型
气缸Ⅰ腔和Ⅱ腔的压力、容积、温度和气体密度分别为p1、V1、T1、ρ1和p2、V2、T2、ρ2。根据质量守恒定律,流入Ⅰ腔的气体质量流量应等于容腔的质量变化率。
(13)
应用理想气体状态方程
(14)
式中,R为气体常数,R=287J/(kg·K)。
按照假设,过程中的温度T1与起始时的温度T10之间应满足绝热条件
(15)
式中,k为空气绝热指数,k=1.4,p10为Ⅰ腔的起始压力,将上式代入(13)式整理得Ⅰ腔气体动态过程的表达式
(16)
在小扰动假设下,将初始位置取在中间平衡位置,由于dV1=AdΔy,则得到

(17)
同理,Ⅱ腔的方程为
(18)
将通过阀口的气体流动过程近似为理想气体通过收缩管的一维等熵流动,采用Sanville流量公式[13]
(19)
式中,A为节流孔最小截面积,单位mm2;T为绝对温度,单位K;ps、p1均为绝对压力,单位MPa;Ct为临界压力比,Ct=0.528,Ct>0.528时为亚声速流动,Ct<0.528时为超声速流动。
由于通过滑阀的气体质量流量仅是阀芯位移X和气缸中气体压力p1和p2的函数,即
(20)
若忽略摩擦力,根据牛顿第二定律,有:
(21)
其中,M为活塞及惯性负载质量,f为粘性阻尼系数,FL为外负载力。
活塞位移对阀芯位移的传递函数为
(22)

2.4.3 气动比例位置系统的总模型
由比例阀和阀控缸的数学模型,可得到气动比例位置系统的总模型,其传递函数为
(23)

由于比例阀的响应速度较快,而动力结构的固有频率是控制回路最低的,它对系统的动态特性有决定性的影响,因而系统的传递函数可近似为
(24)
系统的传递函数由比例、积分和二阶振荡环节组成。
3 RBF神经网络监督控制算法
基于RBF神经网络监督控制算法构建控制器,其思想为:初始阶段采用PD反馈控制,然后过渡到神经网络控制。在控制过程中,如出现较大的误差,则PD控制起主导作用,神经网络控制起调节作用,该控制系统如图4所示。

图4 基于RBF神经网络的监督控制系统
设径向基向量为h=[h1,…,hm]T,hj为高斯函数,则
(25)
其中,j为网络输入个数,j=1,…,m;hj为隐含层第j个神经元的输出;x(k)为RBF网络的输入;cj为隐含层第j个神经元的中心点矢量值,cj=[cj1,…,cjm];b为高斯基函数的宽度,b=[b1,…,bm]T。
设权值向量为
ω=[ω1,…,ωm]T
(26)
RBF神经网络的输出为
un(k)=h1ω1+…+hjωj+…+hmωm
(27)
其中,m为隐含层节点的个数。
总控制输入为u(k)=un(k)+up(k),误差指标为
(28)
其中,up(k)为PD控制的输出。
采用梯度下降法,网络权值学习算法为
(29)
ω(k)=ω(k-1)+Δω(k)+α[ω(k-1)-ω(k-2)]
(30)
其中,η∈[0,1]为学习速率,α∈[0,1]为动量因子。
4 气动比例位置系统仿真分析
对气动比例位置系统数学模型对象进行离散化。取RBF神经网络结构为1-4-1,在RBF神经网络监督控制中,学习速率η=0.3,动量因子α=0.05,网络的初始权值wj取[0,1]之间的随机数。
1)阶跃响应
PID控制器参数为Kp=0.2,kd=0.01。在RBF神经网络监督控制中,中心参数取c=[-1.8 0.9 0.9 1.8],高斯基函数宽度取b=0.15*ones(4,1)。理想跟踪指令为yd(k)=0.2m。设定仿真时间为10s,采样周期为0.01s,对气缸活塞位移进行仿真,得到如图5-图7所示的响应曲线。

图5 系统阶跃响应
从图5和图6可以看出,采用RBF神经网络监督控制器,响应速度更快,过渡时间约为6.5s,稳态误差约为0.1mm。图7中un表示RBF神经网络输出,up表示PD控制输出,u表示总输出,神经网络通过对PD控制的学习,使得PD控制逐渐趋于0,并最终在总控制中占据主导地位。

图6 阶跃响应误差

图7 神经网络输出、PD控制输出和总输出
2)正弦跟踪
PID控制器参数为Kp=1.2,ki=0.012,kd=7;在RBF神经网络监督控制中,中心参数取c=[-1.8 0.9 0.9 1.8],高斯基函数宽度取b=0.15*ones(4,1)。理想跟踪指令yd(k)的幅值为0.2m,频率为0.5Hz。设定仿真时间为5s,采样周期为0.01s,对气缸活塞位移进行仿真,得到如图图8所示的正弦跟踪响应曲线,图9位正弦跟踪误差曲线。

图8 正弦跟踪响应

图9 正弦跟踪误差
在1/4周期处,PID和RBF神经网络监督控制幅值衰减分别为3.3%和0.9%,相位滞后分别约为1.73°和3.49°;在3/4周期处,PID和RBF神经网络监督控制幅值衰减分别为2.6%和0.7%,相位滞后分别约为1.35°和2.91°。同时统计其平均误差,RBF神经网络监督控制比PID减少了32.6%。通过比较得知,RBF神经网络监督控制在防幅值衰减和相位滞后等方面优于传统PID。
3)方波跟踪
PID控制器参数为Kp=0.4,kd=1;在RBF神经网络监督控制中,中心参数取c=[-2 1 1 2],高斯基函数宽度取b=0.2*ones(4,1)。理想跟踪指令yd(k)的幅值为0.2m,频率为0.08Hz。设定仿真时间为30s,采样周期为0.01s,对气缸活塞位移进行仿真,得到如图10所示的方波跟踪响应曲线,图11为方波跟踪误差曲线。
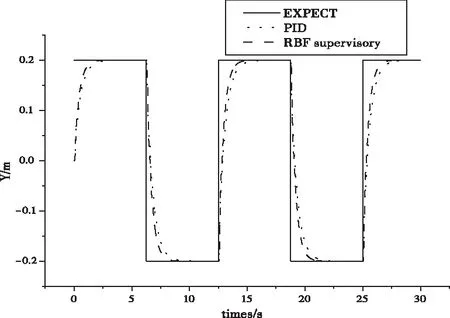
图10 方波跟踪响应
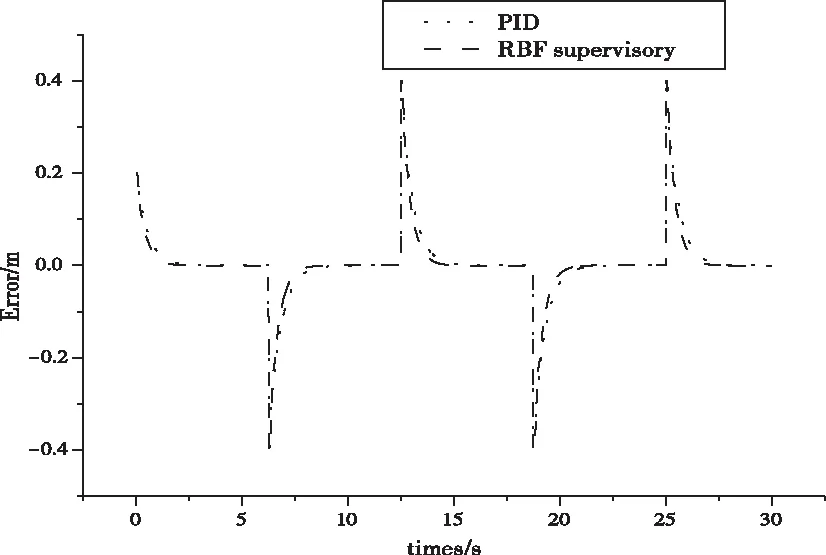
图11 方波跟踪误差
两种控制器下的方波跟踪幅值基本无衰减,RBF神经网络监督控制的方波跟踪响应更快,统计其平均误差,神经网络监督控制比PID减少了15.7%。
5 结论
本文根据气浮无摩擦缸驱动的3-UPU并联机器人的几何关系推导其运动学方程并基于数值解法得到了该机器人的工作空间,同时针对该机器人的气动比例位置系统设计了RBF神经网络监督控制器。通过仿真分析可知,该机构有较大的工作空间,同时对于气动比例位置系统,RBF神经网络监督控制器具有更快的响应速度,其控制性能要优于传统PID控制器,为后续的实验研究奠定了基础。