基于改进粒子群算法的光伏系统MPPT控制研究
2021-11-19梁明玉蔡新红
梁明玉,蔡新红,赵 咪
(石河子大学机电工程学院,新疆石河子 832000)
1 引言
光伏发电被认为是可再生能源领域内最具发展潜力的技术,近几年有了飞跃式的发展,其重要性不言而喻[1]。太阳能作为天然的清洁能源,它具有污染小、成本低和可利用性强的优势,已经成为全球各个国家最受欢迎的可再生能源之一,适应当前所提倡的环境友好发展战略。然而,对于大规模的光伏发电阵列,由于外界的环境因素以及用电负荷的随机性,使得光伏系统在运行过程中出现功率的波动,导致其输出的特性曲线呈非线性,系统很难保持在最大功率点处运行[2]。并且,光照不均匀导致阵列出现部分遮蔽的状况。当光伏阵列被部分遮蔽时,光伏发电系统的电压和电流将会出现随机波动,导致系统的输出功率曲线上出现多个局部峰值。因此,为了提高光伏发电系统的输出效率,必须要采用最大功率点跟踪技术,使系统保持最优运行[3]。
目前,关于光伏系统的最大功率点跟踪技术(MPPT)已经提出了多种方案[4],其中传统的方法包括爬山法(HC)、扰动观察法(P&O)、电导增量法(INC)。传统的算法适用于均匀光照下的最大功率点跟踪,输出功率曲线仅存在一个最大值。实际工程中,光伏阵列受环境的影响较大,当光伏面板在部分阴影遮蔽条件下,系统输出的功率-电压特性曲线将会出现多峰值的现象,因此传统的最大功率点跟踪算法不再适用于动态系统。为了解决这一问题,国内外专家提出了许多新的优化算法。文献[5]基于部分遮蔽条件下的光伏模块,提出了一种基于差分进化(DE)的算法,提高了跟踪效率。文献[6]为了解决对局部最大功率的搜索问题,提出了一种基于蚁群优化(ACO)的最大功率点跟踪控制算法,该算法有效地解决了对局部最大功率点的跟踪。文献[7]提出了基于遗传算法(GA)的最大功率点跟踪方法,提高了系统的追踪效率,并且能够有效地对全局最大功率进行跟踪。文献[8]针对部分遮蔽条件下的光伏系统,提出了一种萤火虫算法,有效地提高跟踪性能。文献[9]基于传统的爬山法(HC),提出了一种改进的最大功率点跟踪算法,有效地提高了光伏系统的跟踪效率。但是,其大量的数据计算和算法规则,导致其运行效率较低且增加了整个系统的成本,因此不适用于实际工程。
基于上述的研究,光伏发电系统主要存在的问题有两个方面,一方面是系统在局部阴影条件下难以精确追踪到全局最大功率点;另一方面是系统追踪最大功率点的效率低下、稳定性差。因此,本文首先讨论了在局部阴影条件下的光伏发电系统,并分析了其输出特性。然后,采用随机惯性加权策略对粒子群算法进行优化和改进,并与传统算法进行比较,验证了该算法的有效性。改进的算法可以在局部阴影下快速准确地跟踪最大功率点,达到最大功率稳定运行的目的。
2 光伏系统
光伏系统的结构图如图1所示。由光伏电池、DC-DC变换电路、MPPT控制模块及负荷组成。光伏电池电池的等效电路如图2所示[10]。

图1 光伏系统结构

图2 光伏电池的等效电路
其中Iph是光生电流,其值与外界温度T、光照强度S,以及光伏电池板的面积相关。Id为二极管的反向饱和电流。Rsh和Rsr分别为光伏电池的串联电阻和并联电阻,其值由光伏电池本身材料等因素决定。V和I为光伏电池输出的电压和电流,两者的关系为
(1)
其中光生电流Iph的值由下式确定
(2)
式中:标准条件参考条件为Tref=25℃,Sref=1000W/m2;Isc是在标准参考条件下测得的短路电流;S代表当前的光照强度;T代表光伏电池的表面温度;CTg是光伏电池温度系数。
二极管反向电流Id参见下式
(3)
对上述光伏电池模型进行一定程度的简化,得到光伏电池的实际工程I-V方程
(4)
其中,电容系数C1和C2可以表示为
(5)

(6)
上述表达式中,Uoc为光伏电池的开路电压;Um为光伏电池最大功率点处的电压;Isc为光伏电池的短路电流;Im为光伏电池最大功率点处的电流;n为二极管P-N结扩散系数,其值在[1,2]之间;q为电子电荷,其值为1.6021×10-19C;k为波兹曼常数,其值是1.3865×10-23J/K;Tref为标准状态下的温度,其值为298K。如图3(a)和(b)所示,光伏面板在光照强度为1000W/m2,温度为25℃的理想条件下输出的P-U与I-U特性曲线。

图3 光伏电池的输出特性曲线
3 光伏输出特性
3.1 理想条件下光伏系统的输出特性
采用控制变量法,针对理想条件下的光伏阵列,通过改变温度和光照强度,分析两种因素对光伏系统的影响[11]。
1)保持光伏系统外界环境的光照强度S一定,改变其温度T的大小。本系统将光照强度设置为1000W/m2保持不变,外界温度分别为0℃、25℃、50℃、75℃,观察系统在理想条件下的输出特性,其仿真结果如图4示,(a)是功率-电压曲线,(b)是电流-电压曲线。
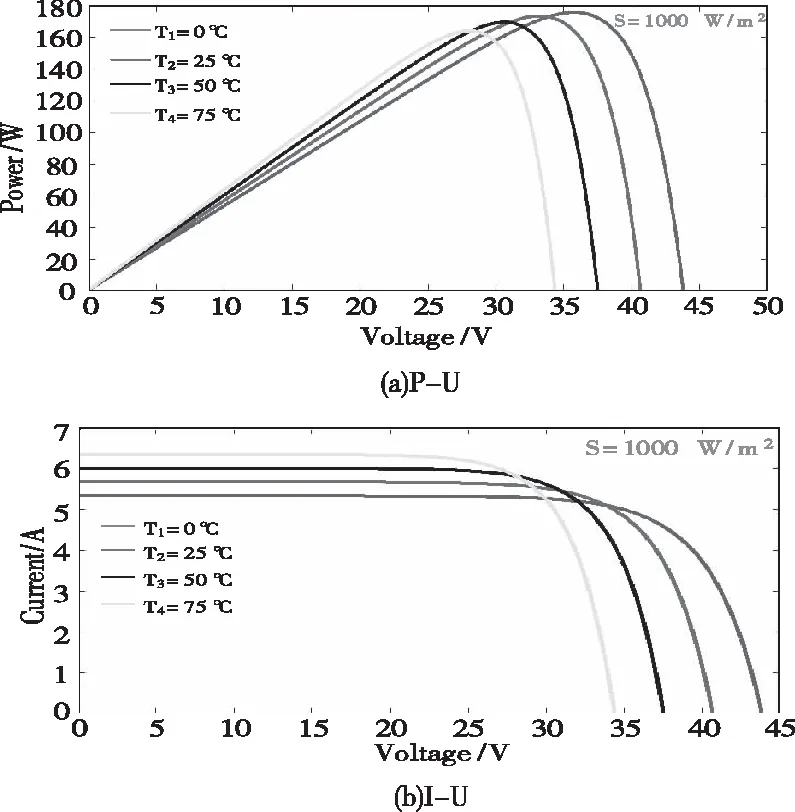
图4 光照强度一定的光伏特性曲线
根据以上仿真结果可知,系统的光照强度保持一定时,温度的变化对光伏电池的输出特性影响较小。随着温度的逐次升高,电流略微增大,但电压有所下降。同时,随着温度的升高,光伏电池的输出功率逐渐下降。
2)保持光伏系统外界环境的温度T一定,改变其光照强度S的大小。本系统将温度设置为25℃保持不变,外界光照强度分别为400W/m2、600W/m2、800W/m2、1000W/m2,以此来观察系统在理想条件下的输出特性,其仿真结果如图5示,(a)是功率-电压曲线,(b)是电流-电压曲线。

图5 温度一定的光伏特性曲线
根据以上仿真结果,当温度保持不变时,光照强度的变化会使电流发生较大的变化,光照强度增加时,光伏电池最大输出电流明显向上平移,最大输出功率也因此提高。
3.2 局部阴影下光伏系统的输出特性
如上所述,光伏阵列在均匀的太阳辐射下,系统输出的I-U特性曲线呈连续型,P-U特性曲线上仅仅存在一个峰值。当外部环境发生变化时,系统的输出特性将会改变。系统在部分遮蔽的条件下,其输出的特性曲线上存在多个峰值,如图6示,仿真结果显示I-U特性曲线呈现四个阶梯状,P-U曲线上存在三个局部峰值和一个全局峰值。

图6 光伏系统在局部阴影下的输出特性曲线
根据以上仿真结果可知,其输出特性曲线呈现多个局部峰值,导致整个系统的输出功率不稳定。因此,传统的最大功率跟踪方法已经不适用于该系统。本文基于传统的粒子群算法,利用惯性权重对其改进,改善传统方法的不足。
4 粒子群算法
4.1 粒子群算法的简述
粒子群算法对于多峰值的寻优问题具有良好的效率,主要用于系统中具有多个局部最优点的函数优化[12]。采用多个协调粒子,并且每个粒子共享或交互在各自的搜索空间中。运行过程中,每个粒子在搜索空间中以Vt的速度移动。粒子移动的范围取决于两个因素,一是粒子本身所处的最佳位置,另一个是其它粒子所获得的最佳位置。以下数学方程给出了粒子的速度和位置的更新。
(7)
(8)
式中:ω为惯性权重,c1和c2为加速常数,其决定了算法的搜索能力。r1和r2是归一化随机数,其值的范围介于0和1之间。变量Pbest用于存储第i个粒子当前的最佳位置,如果满足(10)式,则更新该粒子的位置(9)。
(9)
(10)
其中,f是在每个迭代周期中最大化的目标函数。变量Gbest用于存储粒子获得的最佳位置。在此过程中,粒子在搜索空间中不同的方向上移动,单个迭代周期的各个物理量的移动轨迹如图7示。

图7 粒子在空间中的移动轨迹
4.2 改进的PSO算法在MPPT中的应用
本文基于上文所描述的粒子群算法,并对算法的权重进行了改进,以此来实现光伏系统在部分遮蔽条件下的最大功率点追踪控制。为实现算法的功能,通过改进传统的粒子群算法,假设模块在n维空间内,共有N个个体,第i个个体用Ni表示,其位置属性为Si,速度属性为Vi。因此,每个模块包含两个量,则可以用下式来表示
Ni=[Si,Vi]
(11)
光伏阵列中个体分布密集,单个最大功率的位置与速度都处在一个n维的空间内。使用单位向量的方法,能够将位置与速度的关系表示为下面的向量表达式
Vi=[vi1,vi2,vi3…vn]
(12)
Si=[si1,si2,si3…sin]
(13)
在光伏阵列中,每个模块都具备以上关系,将各个模块组合成为一个整体,形成了一个群体,该群体的关系可以用下式来表示
Z=[N1,N2,N3…Nn]
(14)
其中Z表示总的群体,整个系统的模型群体建立完成。为了寻找动态情况下整个系统的最大功率点位置,建立了如下数学模型。首先对系统所包含的个体数量进行计算评估,将个体的位置作为目标函数的变量,得到系统位置的评估结果。用Yi表示第i个个体的位置对应的结果。
Yi=f(Si)=f(si1,si2,si3…sin)
(15)
其次,为了精确的得到寻优结果,要将每个模块与整个系统在理想情况下输出的最大功率位置作为基准,来调整寻优过程中的速度。假设每次粒子移动的时间为T,则该粒子在上一次的速度可表示为
(16)
模块在理想条件下的输出最大功率位置为
(17)
整个系统在理想条件下的输出最大功率位置为
(18)
单个模块当前位置到历史最优位置的速度为
(19)
系统的当前位置到历史最优位置的速度为:
(20)
最终求得系统当前的速度为:
(21)
(22)
惯性权重ω的值由式(22)确定:
(23)
本文通过改进传统粒子群算法的惯性权重ω,从一定程度上克服ω的线性递减所带来的不足。对于多峰值的光伏系统,有效地避免陷入局部最大功率[13]。其算法流程如图8所示。

图8 算法流程图
5 仿真分析
基于上文所述,光伏阵列在部分阴影遮蔽的条件下,系统将出现多个局部峰值。为了验证本文所提的最大功率跟踪算法,在Matlab/simulink环境下搭建了MPPT电路的仿真模型如图9所示。电路的主要参数包括短路电流Isc=7.45A,最大功率点电流Im=6.95A,开路电压Uoc=35.8V,最大功率点电压Um=29.2V,电容C1=110μF,电容C2=220μF,电感L=0.4mH,电阻R=26Ω,频率f=50kHz,模拟了光伏系统在部分遮蔽条件下,光照强度分别为1000W/m2,800W/m2,600W/m2,400W/m2,确保本文所提出的算法能够正常的运行。如图10所示,模拟部分遮蔽条件下的光伏系统所输出的P-V特性曲线上存在3个局部峰值,1个全局峰值。
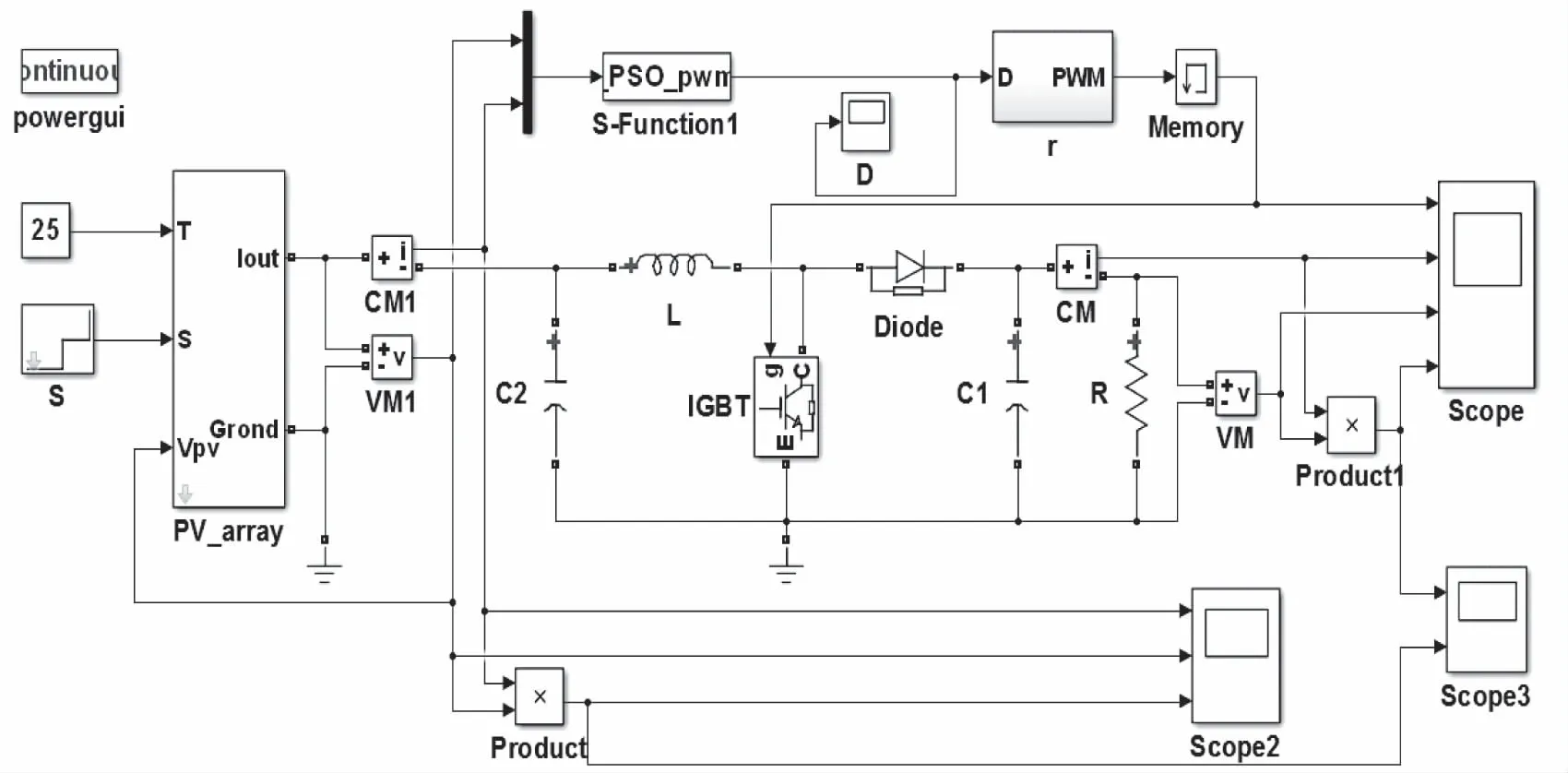
图9 电路仿真模型

图10 部分遮蔽条件下系统输出的P-U曲线
如图11所示,改进后算法的跟踪过程,粒子Pi根据式(21)和(22)开始迭代,其中粒子的加速度常数为c1begin=2.7,c2begin=0.5,c1end=1.2,c2end=2.2;归一化常数r的值分别为r1=0.9572,r2=0.4854;跟踪过程中粒子的初始速度为Vmin=3.1043,最大速度为Vmax=37.2511;惯性权重ω的值由式(23)确定。
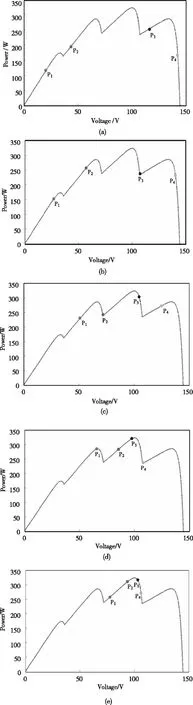
图11 粒子的跟踪过程局部放大
其中,ω的初始值为0.4,在系统运行过程中根据粒子的移动位置以及速度,惯性权值ω能够随机的调整数值的大小,可以避免粒子跳过全局最大值,使算法精确寻优。
图11 中(a)-(f)显示了改进后的最大功率跟踪系统运行时粒子的迭代特性。如图11(a)所示,四个粒子的初始位置分别处于P-U曲线的不同位置,随着迭代次数的增加,粒子的位置不断更新。由于部分遮蔽条件下,P-U曲线上存在多个峰值,粒子在搜索过程中,曲线上的局部峰值在不断的更新,因此每个粒子都处于激活的状态,时刻保持与上一时刻的位置进行对比。如图11(d)所示,P1更新后的位置在一个局部峰值上,然而,粒子并没有停止追踪,继续保持追踪状态。如图11(e)所示,P1越过了局部峰值,保持搜索状态,继续向全局峰值靠近。如图11(f)所示,最终四个粒子均达到全局峰值,粒子停止搜索,系统保持最大功率输出,粒子在寻优过程中的电压和功率见表1。

表1 粒子在寻优过程中的电压和功率的关系
如图12所示,模拟仿真在温度和光照强度相同的条件下进行。当光伏系统被部分遮蔽时,如图12(a)所示,P&O算法在0.3秒处围绕局部峰值振荡,其输出功率的效率为81.4%。如图12(b)所示,根据仿真结果显示,改进的PSO算法能够在短时间内跟踪系统的全局最大功率,其输出功率的效率为99.2%。因此,与传统的最大功率跟踪算法相比较,改进的粒子群算法在效率上大大高于传统的算法。

图12 部分遮蔽条件下算法的跟踪仿真
6 结论
本文提出了一种基于随机权重的粒子群算法,利用该算法来实现部分阴影条件下光伏系统的最大功率点跟踪。首先,针对局部阴影条件下光伏输出特性呈多峰值非线性的特点,以粒子群算法为基础,建立光伏阵列的最大功率跟踪模型,然后根据比较类推法获得系统的最大功率点;其次,所提优化算法为解决局部阴影问题提供了一种新的方式,相较于传统的算法,其收敛速度及精确度有较大的提升,且该优化算法适应性强,受外界环境的影响较小,能够避免系统陷入局部最优解;最后,由仿真结果可知采用改进后的粒子群算法在5.2s后系统稳定在80V,最大输出功率为322W,而采用传统的算法,其跟踪时间较长且在达到最大功率点时存在着较大幅度的波动。