基于组态技术的三相异步电动机变频调速方法
2021-11-19李成良
李成良,程 晖
(大连海洋大学应用技术学院,辽宁大连116300)
1 引言
三相异步电动机在农业、交通、国防领域以及人们日常生活里较为常用,三相异步电动机的结构复杂度较低,且制作方法简单,运行模式较为稳定,最重要的是使用成本较低,但目前三相异步电动机调速问题一直没有得到较好地解决。即使交流调速方案被很多领域所应用,但是应用效果没有直流调速方法显著。且伴随近几年三相异步电动机的使用量愈发增多,相关研究人员对三相异步电动机变频调速技术已不再陌生。根据相关资料显示,家用空调、楼房供水系统、企业等多种电机负载仅有60%,如果使用变频调速技术进行三相异步电动机变频调速,节能降耗的效果将得以优化。
文献[1]、文献[2]分别提出基于DSP的异步电机变频调速矢量控制方法、单相感应电动机自整定优化调速控制方法,两种方法对电机转速均存在较好的调节效果,但是两种方法在调速过程中,抗干扰性较差,对调速环境存在约束。为此,提出基于组态技术的三相异步电动机变频调速方法。组态模型可以完成三相异步电动机的转速信息采集,把所挖掘信息以可视化手段传输至工作人员,此环节的设计可以显著优化后期电动机调速效果。
2 三相异步电动机变频调速方法
2.1 基于单滤波器多模型算法的转速数据可视化挖掘组态模型
目前市场上可视化数据挖掘工具具有一定的针对性,都是通过各自行业专家为各自领域“量身定做”的[3,4]。相对来讲,通用可视化数据挖掘工具不多,应用效果也不尽如人意,使用范围也存在一定约束。原因在于通用工具中的可视化模式具有单一性,未能充分使用可视化技术,致使用户需要深入分析可视化技术,这对用户来讲存在一定难度,比如用户在挖掘三相异步电动机转速信息后,需要自己手动将三相异步电动机转速信息从数据模式转换成图表形式。
为克服此问题,需要优化通用挖掘工具的可视化交互性能与可操作性,挖掘三相异步电动机转速数据潜在的规律与有效数据。而实际情况是一种组合或许仅对某一类数据集存在有效性,对其它类型的数据不存在有效性。因此,本文借鉴组态思想,在三相异步电动机转速数据挖掘的各个阶段中,通过用户来定义可视化组合,能够把典型的可视化组合设成模板。此类做法下用户可以在挖掘过程中设定适合自己使用的可视化组合策略,将转速信息以多种表达模式反馈至用户[5]。
想完成此类组态结构的可视化数据挖掘,需要实现可视化的动态组合,获取数据支撑。由于可视化不仅具有图形、图表的模式,还存在数据集模型。挖掘时用户将不停与挖掘模型实施交互,数据范围具有实时变化的特性,可视化描述的数据集自身也具有变动性。因此,若将可视化图形和数据集相融,那么一个数据集仅可以使用一种可视化方法。为保证可视化视图具有多样性、数据集具有独立性,使用组态技术将可视化图形与数据集进行构建。数据集对象是基于单滤波器多模型算法的转速估计方法计算的转速数据,其可驱动可视化对象(统计图、表格、数据等模式)实施展示[6]。
基于单滤波器多模型算法的转速数据可视化挖掘组态模型详情如图1所示。

图1 基于单滤波器多模型算法的转速数据可视化挖掘组态模型
如图1所示,基于单滤波器多模型算法的转速数据可视化挖掘组态模型,主要通过基于单滤波器多模型算法的转速估计方法,使用三相异步电动机运行数据库中电动机运行数据估计三相异步电动机转速,最后使用可视化对象将转速挖掘结果反馈至用户[7,8]。其中,基于单滤波器多模型算法的转速估计方法的估计过程如下:
三相异步电动机在静止坐标系中的线性四阶动态模型是
y(t)=A(ϖ)y(t)+Bv(t)
(1)
x(t)=Cy(t)
(2)
(3)
(4)
(5)
其中,vsα、vsβ均表示定子电压;jsα、jsβ均表示定子电流;φsα、φsβ均表示定子磁链;φrα、φrβ均表示转子磁链;Ss、Sr分别表示定子电阻与转子电阻;Km、Kr、Ks分别表示定子电感、转子电感、互感;ϖ表示转子转速;ε表示感应电动势。
将定、转子磁链设成状态变量,保证每个变量数值的数量级不存在差异,防止状态估计算法出现数值不稳定的情况,可优化参数的可辨识度[9]。如果采样周期较小,把上述连续状态方程离散化。则
y(t)=A(ϖ)y(t-1)+Bv(t-1)
(6)
x(t)=Cy(t-1)
(7)
三相异步电动机的转速非已知量,为了可以合理调节电动机转速,必须先估计转速值。使用单滤波器先估计转速,再倒进三相异步电动机转速状态方程估计转速值[10]。详细过程如下:
1)设定三相异步电动机转速时需估计参数,选取M个离散值ϖ1,ϖ2,…,ϖM,构建M个线性子模型,设置差异转速之间的互相转换过程属于马尔可夫过程,转换概率是γij,0<γij<1,那么转速是ϖi的模型能够描述成
yi(t)=A(ϖi)y(t-1)+Bv(t-1)
(8)
xi(t)=Cyi(t-1)
(9)
其中,i表示差异转速之间的互相转换次数。
2)若定子电压已知,使用M个子模型依次估计获取各自的定子电流,能够获取定子电流检测值和每个子模型估计值相应的残差ui(t)。
3)若残差满足高斯分布,便可获取每个子模型的似然函数Ωi(t)。
5)计算M个离散转速值ϖi(k)和其与ϖi的乘积之和便可获取电机的估计转速
(10)
2.2 基于PI控制器的异步电动机转速调节方法
2.2.1 负载恒定已知时控制器设计
1)设置期望的平衡点
负载转矩恒定已知时,ηL=ηL0,ηL、ηL0依次是电磁转矩与负载转矩。在三相异步电动机平衡点处,控制转速ϖ(k)与给定的期望转速ϖ0。如果使用转子磁场定向给定的期望值θro,则期望的转子磁链方向和dq坐标系的d轴相同,那么三相异步电动机期望的平衡点y0是
(11)
(12)
(13)
其中,θs0、θr0、θsd0、θsq0分别表示三相异步电动机电磁子系统定子期望值、转子期望值、电磁子系统定子d轴的期望值、电磁子系统定子q轴的期望值;Im表示转动惯量;δ表示积分分离阈值。
按照矢量控制原理获取的平衡点是
板式换热器形成内流道需将两人字形波纹板片按不同方向叠加在一起。板式换热器组装过程:相同板式换热器板片,将第一张板片安装在设定平面上,第二张板片沿着其几何中心旋转180°按放在第一张板片上,重复此过程成安装完整板式换热器。如构造一组单流道的换热系统只需将两张相同板片按上述方法组装即可。为实现分析过程根据实际板片组装方式通过CATIA软件创建一组单流道的换热系统。该内流体模型壁面包括:流体入口、流体出口、换热壁面及壁面边界如图3所示。
(14)
(15)
jrd0=0
(16)
(17)
其中,jsd0、jsq0、jrq0、jrd0分别表示三相异步电动机机械子系统定子在d轴上期望值、q轴上期望值、机械子系统转子在q轴上期望值、机械子系统转子在d轴上期望值。η0、mρ分别表示电磁转矩期望值、极对数。
2)控制器求取
(18)

(19)
(20)
其中,Id、Sd分别表示对角阵与对角常数阵;s表示定子。
设定
(21)
(22)
其中,右上标T表示转置;Ss表示定子电阻;I2表示反对称矩阵。
负载恒定已知时,转速控制器方程是
(23)
其中,θr、Sr分别表示转子控制量、转子电阻;jrq0表示电磁子系统转子在q轴中期望值的反对称矩阵向量;vs表示定子控制输出量;js0表示定子期望值;js表示定子原始值;jr0表示转子期望值;θrd是三相异步电动机电磁子系统转子在d轴上的原始值。
2.2.2 负载转矩有扰动时控制器设计
如果三相异步电动机负载转矩存在扰动,ηL≠ηL0,三相异步电动机将出现转速稳态误差。此时使用PI控制去除稳态误差,设定三相异步电动机负载转矩扰动是ΔηL,那么运算三相异步电动机平衡点的实际负载转矩是ηL=ηL0+ΔηL。为了避免积分饱和,使用积分分离方法,设计三相异步电动机负载扰动估计器[11,12]。则
(24)
其中,gp、gi表示阻尼参数;t0表示初始时刻。
则三相异步电动机负载转矩存在扰动时,转速控制器是
(25)
综上,在负载恒定已知、负载转矩有扰动的条件下,实现对三相异步电动机的变频调速。
3 实验分析
为证明本文方法的有效性,使用Matlab/Simulink和交流调速反馈实验台对其进行测试。实验中所用三相异步电动机详细信息如表1所示。
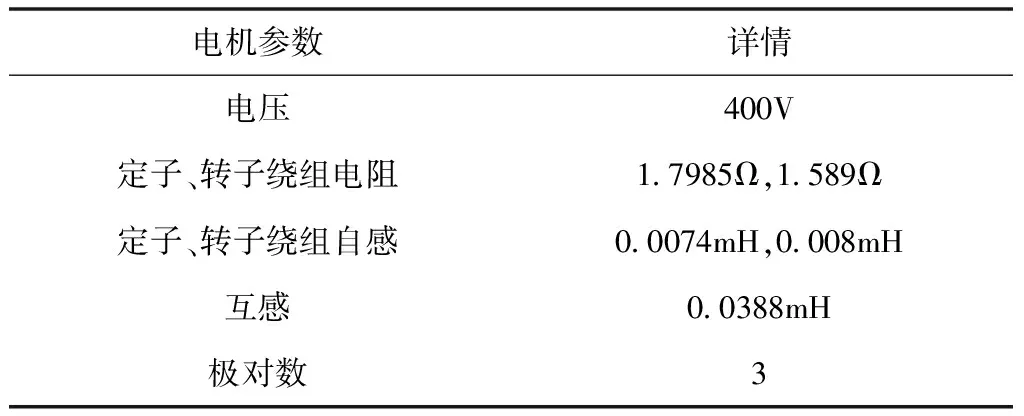
表1 三相异步电动机详细信息
使用本文方法、文献[1]提出的基于DSP的异步电机变频调速矢量控制方法、文献[2]提出的单相感应电动机自整定优化调速控制方法对表1所示的三相异步电动机进行变频调速控制。在测试三种方法的调速性能时,主要分为两部分,一是三种方法对三相异步电动机变频调速前的转速估计效果,二是三种方法对三相异步电动机变频调速效果。
3.1 转速估计效果
在负载恒定已知、负载转矩有扰动两种条件下,三种方法对三相异步电动机转速估计效果如图2、图3所示。

图2 负载恒定已知条件下转速估计效果对比
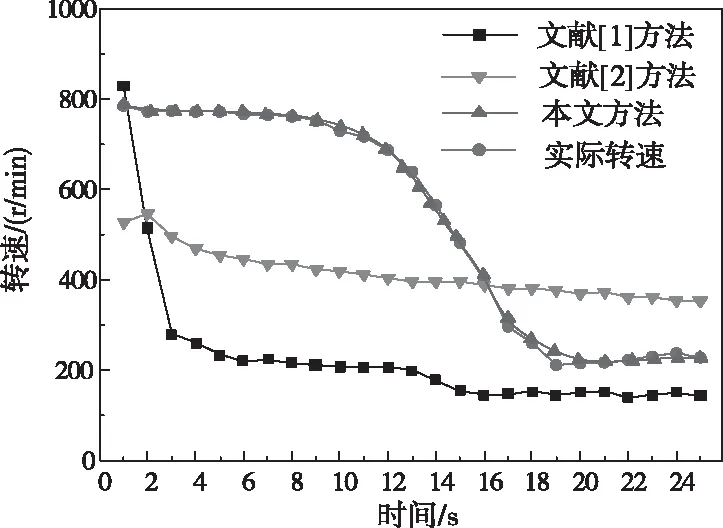
图3 负载转矩有扰动条件下转速估计效果对比
分析图2、图3可知,在负载恒定已知、负载转矩有扰动两种条件下,本文方法对三相异步电动机变频调速前的转速估计值与实际转速值基本一致,估计精度较高。两种对比方法对三相异步电动机变频调速前的转速估计值与实际转速值存在偏差,两者估计偏差均大于本文方法。
3.2 变频调速效果
在负载恒定已知、负载转矩有扰动两种条件下,三种方法对三相异步电动机转速估计效果如表2、表3所示。

表2 负载恒定已知条件下三种方法调速效果

表3 负载转矩有扰动条件下三种方法调速效果
分析表2、表3可知,在负载恒定已知、负载转矩有扰动两种条件下,本文方法对三相异步电动机变频调速后,三相异步电动机转速和期望转速仅存在1r/min之差,两种对比方法对三相异步电动机变频调速后,三相异步电动机转速和期望转速值存在一定差距,对比之下,本文方法的调速效果最佳。
4 结论
本文利用组态思想提出了基于组态技术的三相异步电动机变频调速方法,实现了三相异步电动机转速的精准估计与合理调节。在调速之时,分别在负载恒定已知、负载转矩有扰动两种状态下设计转速调节控制器,有效提升其对三相异步电动机变频调速的效果。经过测试可知,本文方法在负载恒定已知、负载转矩有扰动两种状态下,可实现三相异步电动机转速的精准估计与合理调节,应用效果优于基于DSP的异步电机变频调速矢量控制方法、的单相感应电动机自整定优化调速控制方法。