基于虚拟样机技术的某型摆臂机构研究
2021-11-18刘大庆邱群先
刘大庆,李 伟,邱群先
(中国船舶重工集团公司第七一三研究所,河南 郑州,450015)
1 引言
舰炮作为海军的主战武器,在海战中发挥着不可替代的作用。作为传统武器系统,舰炮对自动化程度和可靠性要求很高,其发射系统及供补弹技术一直是研究的重点和难点所在,供弹系统的性能好坏对舰炮的综合性能指标有着很大的影响[1]。目前世界中大口径舰炮供弹系统大都已经实现自动化,摆臂机构作为供弹系统的中间环节,在整个供弹路径中起到了非常重要的作用,也广泛应用于国内外中大口径舰炮的供弹系统中。
虚拟样机技术(Virtual Prototyping Technology,VPT)是一项新生的工程计算方法。采用计算机仿真与虚拟技术,在计算机上通过CAD/CAE/CAM等技术把产品的资料集成到一个可视化的环境中,实现对产品的仿真、分析[2]。对于复杂的动力系统,如果采用传统的研究模式,不仅耗费大量时间,而且具有很大不确定性,非常有必要借用虚拟样机技术来进行检验和模拟[3]。
某型舰炮的摆臂机构在设计时采取外置电机作为动力源,通过电机带动齿轮齿条,由齿条推动连杆带动摆臂摆动,完成弹药的交接。电机作为动力源,其动力传输到摆臂过程中经过几次动力转换和传递,最终控制摆臂按照预定的轨迹运动,传统的曲柄连杆机构计算方法在分析摆臂的运动过程中遇到较大困难,这种计算方法对电机的设计及控制所能提供的指导作用很有限[4]。因此,本文中采用MATLAB和ADAMS软件联合仿真,将虚拟样机技术应用于摆臂机构的计算仿真,通过仿真计算得到摆臂和电机的动力学特性曲线,重点关注摆臂电机的输出功率和扭矩,为电机的设计以及控制过程提供参考[5]。
2 摆臂机构模型建立及运动规律
2.1 摆臂机构模型
摆臂机构主要功能组成为:摆臂,齿轮,齿条,电机等,其中驱动电机通过减速机和联轴器带动齿轮作圆周运动,齿轮推动齿条往复直线运动,齿条一端和摆臂连接,摆臂旋转轴固定于舰炮高低回转中心,齿条推动摆臂绕摆臂旋转轴作摆动。摆臂接收到弹药之后,通过电机的驱动,实现往复摆动来追踪发射系统,最终实现弹药的交接。摆臂机构的运动需要按照指定的轨迹摆动,在本文中通过MATLAB和ADAMS进行联合计算,根据设定的摆臂运动,对电机的运动规律和齿轮齿条进行受力分析,为后续电机的设计工作提供一定的参考。

图1 摆臂机构模型
2.2 摆臂机构运动规律
摆臂机构本身结构比较复杂,动力传动过程比较繁琐,因此需要对模型进行适当简化,简化后的摆臂机构如图2所示。

图2 摆臂机构简化图



在本例中,摆臂需要在固定时间T0内摆动到角度a,摆臂的摆动角速度为ω2,摆臂摆动最大角速度为ωm,摆臂的加速段结束时间为t1,减速段开始时间为t2,齿轮转动角速度为ω1,齿轮半径为r1,齿条运动位移为x,摆臂摆动角度为α,摆臂旋转轴与齿条铰接点连线同竖直线夹角为β,其余参数见图2,可以得到下列方程

上述公式中,上侧为摆臂运动规律规划路径,下侧为摆臂与齿轮齿条运动关系,根据设定的摆臂运动规律,使用MATLAB对下侧公式进行求解可以得到齿轮齿条运动曲线,之后将齿轮运动规律折换后施加于驱动电机,使用ADAMS进行多刚体系统动力学求解,可以测算电机扭矩和功率,以及齿轮齿条受力情况,为电机的选型和运动规律提供参考[7,8]。
3 摆臂机构运动分析
简化后的摆臂机构主要组成部分有:摆臂,连杆,齿条,齿轮等,通过三维软件建模之后导入ADAMS中,建立虚拟样机模型,主要参数有:齿条重量约180,摆弹机带弹重量约300,连杆重量约50。机构中有4个部件,其中有4组为旋转低副,1组移动低副,1组高副,系统自由度为F=3×4-2×5-1=1。
该型摆臂机构指定运行时间为1秒,摆臂运行范围100°,即T0=1s,a=100°,设计四种摆臂运动最大角速度,每种情况下设计三种运动时间,如表1所示,共12种工况分别进行计算求解,其中第四种情况为加速之后直接减速,没有匀速段。根据表1情况结合上述公式,通过MATLAB编程可绘制出齿轮运动角速度,将其作为驱动施加于齿轮齿条,进行系统仿真。具体情况如表1所示。

表1 摆臂机构运动规律
3.1 最大角速度ωm=160°/s情况下(取中间值进行分析)
图3.1-1∽3.1-4为加速段0.5s,匀速段0.25s,减速段0.25s的运行状况,图3.1-1∽3.1-2为MATLAB求解运动特性曲线;图3.1-3∽3.1-4为根据MATLAB求解运动特性结果导入ADAMS后,使用ADAMS进行动力学仿真求出的动力学特性曲线;
图3.1-1为摆臂设定的运动规律,根据运动规律求解出的角加速度;
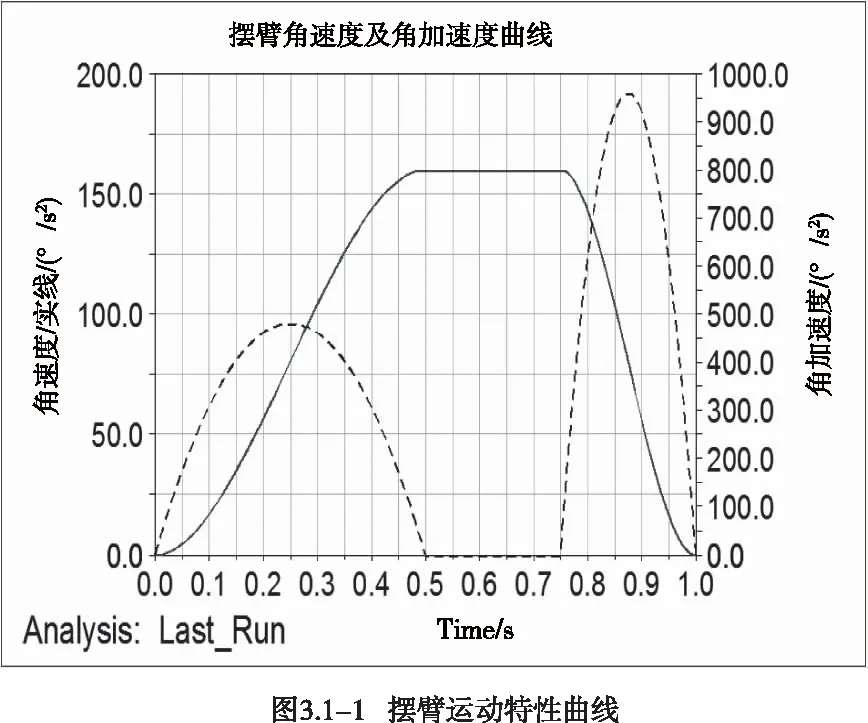
图3.1-2为根据MATLAB求解出的齿轮端运动角速度及角加速度;
图3.1-3为根据ADAMS进行动力学仿真求出的齿轮端所需功率及转矩曲线;
图3.1-4为根据ADAMS进行动力学仿真求出的齿条端受力及加速度曲线;

摆臂运动最大角速度ωm=160°/s情况下,其余两种运动特性求解曲线不在叙述,在后文分析中会将求解数据直接数据列出,对比分析之后对电机端进行最优解求解。
3.2 最大角速度ωm=177.78°/s情况下(取中间值进行分析)
图3.2-1∽3.2-4为加速段0.5s,匀速段0.125s,减速段0.375s的运行状况,图3.2-1∽3.2-2为MATLAB求解运动特性曲线;图3.2-3∽3.2-4为根据MATLAB求解运动特性结果导入ADAMS后,使用ADAMS进行动力学仿真求出的动力学特性曲线;
图3.2-1为摆臂设定的运动规律,根据运动规律求解出的角加速度;
图3.2-2为根据MATLAB求解出的齿轮端运动角速度及角加速度;
图3.2-3为根据ADAMS进行动力学仿真求出的齿轮端所需功率及转矩曲线;

图3.2-4为根据ADAMS进行动力学仿真求出的齿条端受力及加速度曲线;

摆臂运动最大角速度ωm=178.78°/s情况下,其余两种运动特性求解曲线不在叙述,在后文分析中会将求解数据直接数据列出,对比分析之后对电机端进行最优解求解。
3.3 最大角速度ωm=145.46°/s情况下
图3.3-1∽3.3-4为加速段0.5s,匀速段0.375s,减速段0.125s的运行状况,图3.3-1∽3.3-2为MATLAB求解运动特性曲线;图3.3-3∽3.3-4为根据MATLAB求解运动特性结果导入ADAMS后,使用ADAMS进行动力学仿真求出的动力学特性曲线;
图3.3-1为摆臂设定的运动规律,根据运动规律求解出的角加速度;
图3.3-2为根据MATLAB求解出的齿轮端运动角速度及角加速度;
图3.3-3为根据ADAMS进行动力学仿真求出的齿轮端所需功率及转矩曲线;
图3.3-4为根据ADAMS进行动力学仿真求出的齿条端受力及加速度曲线;


摆臂运动最大角速度ωm=145.46°/s情况下,其余两种运动特性求解曲线不在叙述,在后文分析中会将求解数据直接数据列出,对比分析之后对电机端进行最优解求解。
3.4 最大角速度ωm=200°/s情况下
图3.4-1∽3.4-4为加速段0.5s,匀速段0s,减速段0.5s的运行状况,图3.4-1∽3.4-2为MATLAB求解运动特性曲线;图3.4-3∽3.4-4为根据MATLAB求解运动特性结果导入ADAMS后,使用ADAMS进行动力学仿真求出的动力学特性曲线;
图3.4-1为摆臂设定的运动规律,根据运动规律求解出的角加速度;
图3.4-2为根据MATLAB求解出的齿轮端运动角速度及角加速度;
图3.4-3为根据ADAMS进行动力学仿真求出的齿轮端所需功率及转矩曲线;
图3.4-4为根据ADAMS进行动力学仿真求出的齿条端受力及加速度曲线;

摆臂运动最大角速度ωm=200°/s情况下,其余两种运动特性求解曲线不在叙述,在后文分析中会将求解数据直接数据列出,对比分析之后对电机端进行最优解求解。
4 摆臂机构运动结果分析
通过以上仿真计算,可以将计算结果汇总为表2,结合该表格数据重点对电机端进行分析。

表2 摆臂机构仿真计算结果
首先确定减速机的速比,电机额定转速多为2000r/min或3000r/min,可以初步确定减速机减速比范围i=2.69~5.13,综合扭矩以及安装空间等因素考虑,减速机减速比不宜过小,选为i=4比较合适,电机额定速度选取3000r/min,之后根据公式折算到电机端所需功率,电机功率传递到齿轮端需要通过减速机和联轴器等,考虑到传递效率,可以得出电机功率与齿轮功率差值,进而求出该差值在电机功率中所占的比重,计算结果汇总为表3。

表3 电机端计算结果
综合以上数据可以看出,电机选型功率和实际所需功率差值所占比重均小于0.1,分析结果可信,考虑电机外形尺寸,电机端转矩不宜过大,同时考虑齿条受力情况,可以选定序号2中所列情况,电机转矩Td=87.55N·m,电机功率Pd=27.5kW,电机运行规律选取加速段t1=0.5s,电机最大转速ωdm=2337r/min,电机额定3000r/min,这种情况下电机所需功率和转矩最小,齿条受力最小。
5 结论
本文以某型舰炮摆臂机构为例,
通过三维软件建立虚拟样机模型,采用MATLAB和ADAMS进行联合计算,针对特定的摆臂运动规律,对电机端运动特性进行了分析,并对齿轮齿条受力,减速机速比选型,电机功率及转矩匹配性等进行了探索,为电机运行状态控制提供了一种参考。结果表明和实际要求具有较高一致性,为下一步系统优化设计提供了一种探索。
